Using GPS to Track Pole Truck Turning Movements































- Slides: 33
Using GPS to Track Pole Truck Turning Movements Presented by: John Wolf, PE Senior Designer ODOT, Region 1 Preliminary Design & Ron Singh, PLS Chief of Surveys/Geometronics Manager ODOT, Technical Services
The Problem • Intersection at Bennett Road & US 30 – High volume, multilane highway – 3 Crashes in 2008 involving passenger cars and log trucks – 2 injuries and 1 fatality resulted • Permitting issue regarding overhang on long loads – Maximum Overhang was dependant on wheelbase and trailer type – Overhang was measured from rear axle • Pole trucks need access to pole yard
Bennett Road Conflict Point
Bennett Road
Accidents at Bennett Road
Accidents at Bennett Road
The Challenges • Timing was critical – Motor Carrier issued a pilot car requirement on log trucks with large overhang, effective 9/12/08, for over 260 permit holders • Variable vehicle configurations (What should be analyzed? ) • Pivoting trailer bunks influence log sweep path • Turning movement software limitations? • The need to applying the turning movements to multiple situations – Multiple intersection configurations – Freeway ramp terminals – Multilane Roads
Unique Elements of A Pole Truck Long Wheelbase Large Overhang Rear Bunk/Pivot Point Front Bunk/Pivot Point Adjustable Stinger Hitch and Compensator
Extendable Stinger 12’ 6” Length Total 5’ 6” Available Adjustment Compensator Vehicle #2
12’ 13’
Auto. TURN v 5. 1 • Auto. TURN is a CAD-based program that simulates low speed turning maneuvers for highway vehicles – Vehicle inputs • Default vehicle configurations • User defined vehicle configurations • Inputs include number of axles, axle spacing, tractor/trailer length, and distance to pintle hitch – Limitations • Auto. TURN v 5. 1 does not account for adjustable length “stinger” pintle hitch • Turning accuracy for this type of tractor/trailer uncertain
Auto. TURN Inputs Default truck templates Modified pole truck templates
Auto. TURN Outputs
Course of Action • Collected data from ODOT Motor Carrier on common pole truck configurations • Research other turning simulator software • ODOT Maintenance staff coordinated field testing of two pole trucks using GPS tracking data Note: ODOT Motor Carrier Division also collected data on accident history of pole trucks on Oregon highways and neighboring states log truck permitting requirements
OREGON STATE FAIRGROUNDS – TEST SITE
The Survey Approach
Truck Turning Sequence
GPS Devices 12’ Between Cones 5’ 5’ 5’ Ribbons Spaced at 5’ Intervals From Rear Bunk Test Vehicle #2 12’ Between Cones Offset 2’ from Path for Driver’s Side Front Tire
After Data Collection • Create vehicle configurations to replicate field test • Run Auto. TURN analysis • Compare results • Run sensitivity analysis of sweep path based on overhang length • Report Results to Motor Carrier and the Trucking Industry
No Scale
RAW GPS DATA COLLECTED
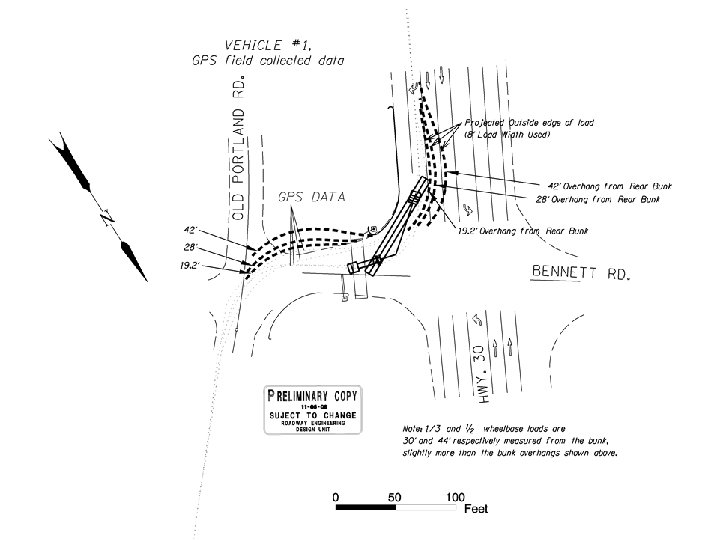
Comparison of Field Tests to Auto. TURN – Vehicle #1
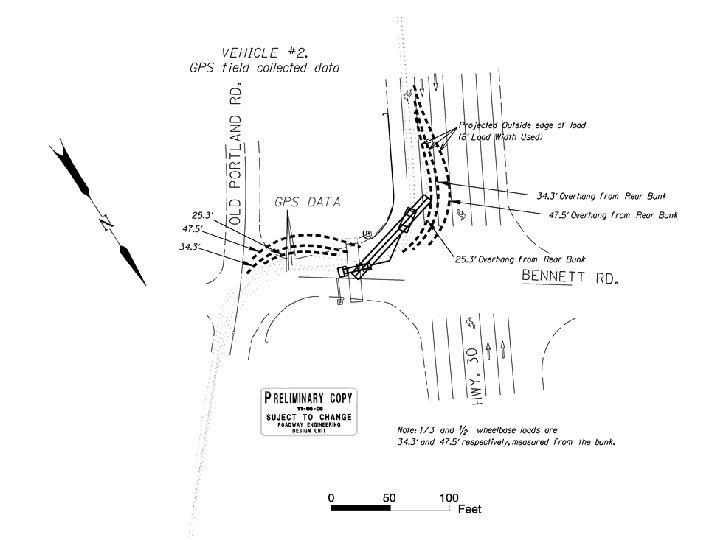
Comparison of Field Tests to Auto. TURN – Vehicle #2
General Findings of Field Test and Analysis • Sweep path is dependent on vehicle configuration and length of overhang from the rear bunk • Sweep path is the same for both left and right turns • Auto. TURN v 5. 1 reasonably predicts pole truck turning movements for various conditions – Path generated using Auto. TURN v 5. 1 predicted log sweep within 2’ for Vehicle #1 and 1’ for Vehicle #2 compared to GPS – Auto. TURN's maximum error in the trailer off tracking was between ½’ and 2’ (2’ occurred as the vehicle exits the curve) – Multiple curves compound the error in the Auto. TURN software
Outcomes • ODOT Motor Carrier changed permitting requirements for overhang, effective 11/24/2008 – Length of overhang was limited to 1/3 Wheelbase with a 25’ maximum for multilane roads – Changed the point which overhang is measured from – Lifted the temporary pilot car restriction for vehicles meeting these requirements – Requirements are posted at: http: //egov. oregon. gov/ODOT/MCT/ • Currently investigating an intersection improvement project at US 30 and Bennett Road to better accommodate pole trucks
Questions?