Use of Models in Analysis and Design Sriram














![enum {N, T, C} state[1. . 2] int turn init state[1] = N; state[2]](https://slidetodoc.com/presentation_image/eef3b08abbca00d66c370fe988f77674/image-15.jpg "enum {N, T, C} state[1. . 2] int turn init state[1] = N; state[2]")

 – Computes inductive invariants")


![a : array [1. . len] of int; int max : = -MAXINT; (](https://slidetodoc.com/presentation_image/eef3b08abbca00d66c370fe988f77674/image-20.jpg "a : array [1. . len] of int; int max : = -MAXINT; (")
















;")
 do { Ke. Acquire. Spin. Lock(); U L")
 do { Ke. Acquire. Spin.")
 to boolean")
 do { Ke. Acquire. Spin.")
 do { Ke. Acquire. Spin.")







 • 1999 -2001 – foundations, algorithms, prototyping – papers")

 – to")







- Slides: 74
Use of Models in Analysis and Design Sriram K. Rajamani Rigorous Software Engineering Microsoft Research, India
Models • Abstractions of reality • All branches of science and engineering use models. Some examples: – Differential equations – State machines • Models enable conquering complexity – Allow focus on one issue at a time, while ignoring others
Models in software engineering • Mainstream mantra: – “Code is truth, and only truth” • Models are used, but not widely – Requirements capturing (UML): • Used specialized domains: telcom, automotive, embedded sytstems – Development tools: • Testing and verification – Design • Model driven development
This talk • Use of models in analysis and design – Personal experience • Analysis: – Extracting analyzable models from source code using iterative refinement • Design: – My assessment of state of the art and important research problems
Models in Analysis
Software Validation • Large scale reliable software is hard to build and test. • Different groups of programmers write different components. • Integration testing is a nightmare.
Property Checking • Programmer provides redundant partial specifications • Code is automatically checked for consistency • Different from proving whole program correctness – Specifications are not complete
Interface Usage Rules • Rules in documentation – Incomplete, unenforced, wordy – Order of operations & data access – Resource management • Disobeying rules causes bad behavior – System crash or deadlock – Unexpected exceptions – Failed runtime checks
Does a given usage rule hold? • Checking this is computationally impossible! • Equivalent to solving Turing’s halting problem (undecidable) • Even restricted computable versions of the problem (finite state programs) are prohibitively expensive
Why bother? Just because a problem is undecidable, it doesn’t go away!
Automatic property checking = Study of tradeoffs • Soundness vs completeness – Missing errors vs reporting false alarms • Annotation burden on the programmer • Complexity of the analysis – Local vs Global – Precision vs Efficiency – Space vs Time
Broad classification • Underapproximations – Testing • After passing testing, a program may still violate a given property • Overapproximations – Type checking • Even if a program satisfies a property, the type checker for the property could still reject it
Current trend • Confluence of techniques from different fields: – Model checking – Automatic theorem proving – Program analysis • Significant emphasis on practicality • Several new projects in academia and industry
Model Checking • Algorithmic exploration of state space of the system • Several advances in the past decade: – – – symbolic model checking symmetry reductions partial order reductions compositional model checking bounded model checking using SAT solvers • Most hardware companies use a model checker in the validation cycle
enum {N, T, C} state[1. . 2] int turn init state[1] = N; state[2] = N turn = 0 trans state[i]= N & turn = 0 -> state[i] = T; turn = i state[i] = N & turn !=0 -> state[i] = T & turn = i -> state[i] = C & state[2 -i] = N -> state[i] = N state[i] = C & state[2 -i] != N -> state[i] = N; turn = 2 -i
N 1, N 2 turn=0 T 1, N 2 turn=1 C 1, N 2 turn=1 N 1, T 2 turn=2 T 1, T 2 turn=1 T 1, T 2 turn=2 C 1, T 2 turn=1 N = noncritical, T = trying, C = critical N 1, C 2 turn=2 T 1, C 2 turn=2
Model Checking • Strengths – Fully automatic (when it works) – Computes inductive invariants • I such that F(I) I – Provides error traces • Weaknesses – Scale – Operates only on models • How do you get from the program to the model?
Theorem proving – Early theorem provers were proof checkers • They were built to support asssertional reasoning in the Hoare-Dijkstra style • Cumbersome and hard to use – Greg Nelson’s thesis in early 80 s paved the way for automatic theorem provers • • Theory of equality with uninterpreted functions Theory of lists Theory of linear arithmetic Combination of the above ! – Automatic theorem provers based on Nelson’s work are widely used • ESC • Proof Carrying Code
Theory of Equality. • Symbols: =, ¹, f, g, … • Axiomatically defined: E=E E 2 = E 1 = E 2 = E 3 E 1 = E 2 f(E 1) = f(E 2) • Example of a satisfiability problem: g(g(g(x)) = x g(g(g(x))))) = x g(x) ¹ x • Satisfiability problem decidable in O(n log n)
a : array [1. . len] of int; int max : = -MAXINT; ( 1 j i. a[j] max) i : = 1; ( i > len) { 1 j i. a[j] max} ( 1 j len. a[j] max} while (i len) if( a[i] > max) max : = a[i]; i : = i+1; endwhile { 1 j len. a[j] max}
Automatic theorem proving • Strengths – Handles unbounded domains naturally – Good implementations for • equality with uninterpreted functions • linear inequalities • combination of theories • Weaknesses – Hard to compute fixpoints – Requires inductive invariants • Pre and post conditions • Loop invariants
Program analysis • Originated in optimizing compilers – constant propagation – live variable analysis – dead code elimination – loop index optimization • Type systems use similar analysis • Are the type annotations consistent?
Program analysis • Strengths – – Works on code Pointer aware Integrated into compilers Precision efficiency tradeoffs well studied • flow (in)sensitive • context (in)sensitive • Weakenesses – Abstraction is hardwired and done by the designer of the analysis – Not targeted at property checking (traditionally)
Model Checking, Theorem Proving and Program Analysis • Very related to each other • Different histories – different emphasis – different tradeoffs • Complementary, in some ways • Combination can be extremely powerful
What is the key design challenge in a model checker for software? It is the model!
Model Checking Hardware Primitive values are booleans States are boolean vectors of fixed size Models are finite state machines !!
Characteristics of Software Primitive values are more complicated – Pointers – Objects Control flow (transition relation) is more complicated – Functions – Function pointers – Exceptions States are more complicated – Unbounded graphs over values Variables are scoped – Locals – Shared scopes Much richer modularity constructs – Functions – Classes
Traditional approach model checker FSM Source code Finite state machines Sequential C program
Automatic abstraction SLAM model checker Data flow analysis implemented using BDDs Finite down Push state machines model Boolean FSM program abstraction Source code C data structures, pointers, procedure calls, parameter passing, scoping, control flow Sequential C program
Computing power doubles every 18 months -Gordon Moore An optimizing compiler doubles performance every 18 years -Todd Proebsting
When I use a model checker, it runs and runs for ever and never comes back… when I use a static analysis tool, it comes back immediately and says “I don’t know” - Patrick Cousot
Rules Static Driver Verifier Read for understanding New API rules Development Precise API Usage Rules (SLIC) Defects Drive testing tools Software Model Checking 100% path coverage Source Code Testing
SLAM – Software Model Checking • SLAM innovations – boolean programs: a new model for software – model creation (c 2 bp) – model checking (bebop) – model refinement (newton) • SLAM toolkit – built on MSR program analysis infrastructure
SLIC • Finite state language for stating rules – monitors behavior of C code – temporal safety properties – familiar C syntax • Suitable for expressing control-dominated properties – e. g. proper sequence of events – can encode data values inside state
State Machine for Locking state { enum {Locked, Unlocked} s = Unlocked; } Rel Unlocked Acq Rel Locked Acq Error Locking Rule in SLIC Ke. Acquire. Spin. Lock. entry { if (s==Locked) abort; else s = Locked; } Ke. Release. Spin. Lock. entry { if (s==Unlocked) abort; else s = Unlocked; }
The SLAM Process c 2 bp prog. P SLIC rule slic prog. P’ boolean program bebop predicates path newton
Example Does this code obey the locking rule? do { Ke. Acquire. Spin. Lock(); n. Packets. Old = n. Packets; if(request){ request = request->Next; Ke. Release. Spin. Lock(); n. Packets++; } } while (n. Packets != n. Packets. Old); Ke. Release. Spin. Lock();
Example Model checking boolean program (bebop) do { Ke. Acquire. Spin. Lock(); U L L if(*){ L Ke. Release. Spin. Lock(); U L U U E } } while (*); Ke. Release. Spin. Lock();
Example Is error path feasible in C program? (newton) do { Ke. Acquire. Spin. Lock(); U L n. Packets. Old = n. Packets; L L U L U U E if(request){ request = request->Next; Ke. Release. Spin. Lock(); n. Packets++; } } while (n. Packets != n. Packets. Old); Ke. Release. Spin. Lock();
Example Add new predicate b : (n. Packets. Old == n. Packets) to boolean program (c 2 bp) do { Ke. Acquire. Spin. Lock(); U L n. Packets. Old = n. Packets; b = true; L L U L U U E if(request){ request = request->Next; Ke. Release. Spin. Lock(); n. Packets++; b = b ? false : *; } } while (n. Packets != n. Packets. Old); !b Ke. Release. Spin. Lock();
Example b : (n. Packets. Old == n. Packets) do { Ke. Acquire. Spin. Lock(); U L b = true; b L if(*){ b L b U b L !b U b L U b U E Ke. Release. Spin. Lock(); b = b ? false : *; } } while ( !b ); Ke. Release. Spin. Lock(); Model checking refined boolean program (bebop)
Example b : (n. Packets. Old == n. Packets) do { Ke. Acquire. Spin. Lock(); U L b = true; b L if(*){ b L b U !b U Ke. Release. Spin. Lock(); b = b ? false : *; } } while ( !b ); Ke. Release. Spin. Lock(); Model checking refined boolean program (bebop)
Observations about SLAM • Automatic discovery of invariants – driven by property and a finite set of (false) execution paths – predicates are not invariants, but observations – abstraction + model checking computes inductive invariants (boolean combinations of observations) • A hybrid dynamic/static analysis – newton executes path through C code symbolically – c 2 bp+bebop explore all paths through abstraction • A new form of program slicing – program code and data not relevant to property are dropped – non-determinism allows slices to have more behaviors
Current status of SDV • Runs on 100 s of Windows drivers • Finds several bugs, proves several properties • SDV now transferred from MSR to Windows division • Used to check several DDK and inbox drivers • Beta Released at WINHEC 2005!
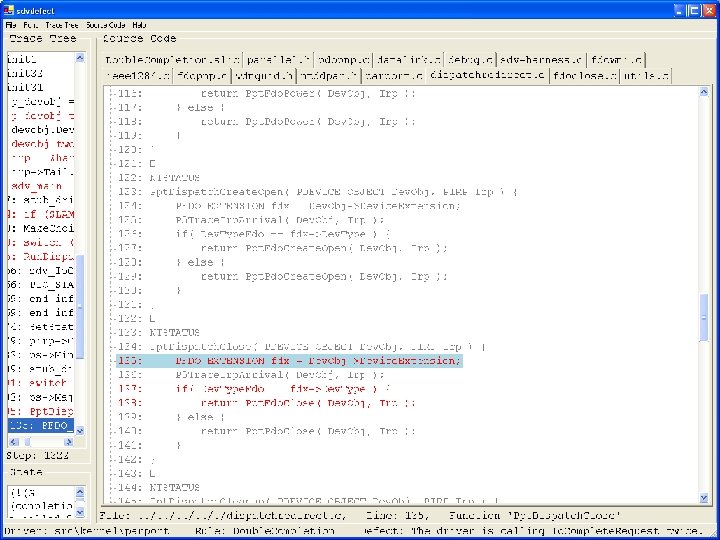
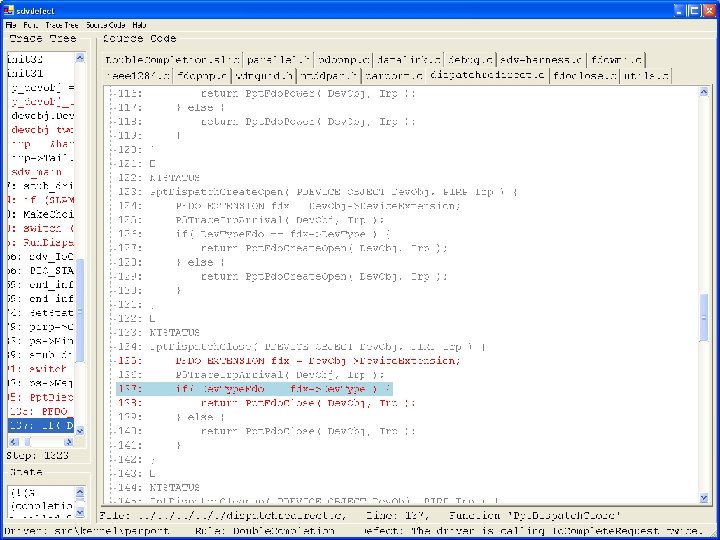
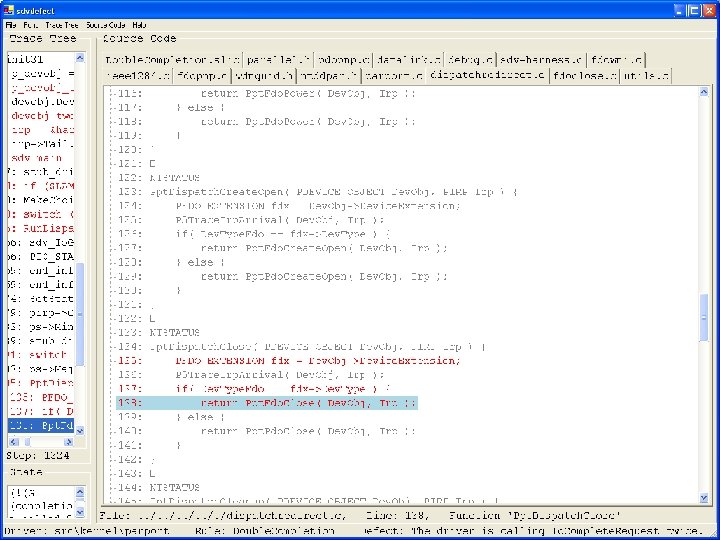
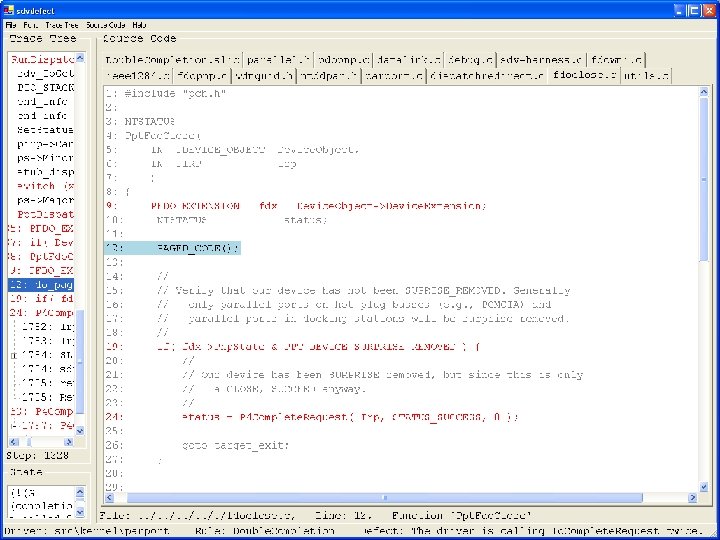
Static Driver Verifier
Static Driver Verifier Driver: Parallel port device driver • • Rule: Checks that driver dispatch routines do not call Io. Complete. Request(…) twice on the I/O request packet passed to it by the OS or another driver
Call #1
Call #2
SLAM/SDV History (with Tom Ball) • 1999 -2001 – foundations, algorithms, prototyping – papers in CAV, PLDI, POPL, SPIN, TACAS • September 3, 2002 – made initial release of SDV to Windows (friends and family) • April 1, 2003 – made wide release of SDV to Windows (any internal driver developer) • September, 2003 – team of six in Windows working on SDV – researchers moving into “consultant” role • November, 2003 – demonstration at Driver Developer Conference • May, 2005 – Beta ships at Win. HEC 2005! • March 2002 – Bill Gates review • May 2002 – Windows committed to hire two Ph. D. s in model checking to support Static Driver Verifier • July 2002 – running SLAM on 100+ drivers, 20+ properties
SLAM • Boolean program model has proved itself • Successful for domain of device drivers – control-dominated safety properties – few boolean variables needed to do proof or find real counterexamples • Counterexample-driven refinement – terminates in practice – incompleteness of theorem prover not an issue
What is hard? • Abstracting – from a language with pointers (C) – to one without pointers (boolean programs) • All side effects need to be modeled by copying (as in dataflow) • Open environment problem
What stayed fixed? • Boolean program model • Basic tool flow • Repercussions: – newton has to copy between scopes – c 2 bp has to model side-effects by value-result – finite depth precision on the heap is all boolean programs can handle
What changed? • Interface between newton and c 2 bp • We now use predicates for doing more things • refine alias precision via aliasing predicates • newton helps resolve pointer aliasing imprecision in c 2 bp
Model Checking, Theorem Proving and Program Analysis • Very related to each other • Different histories – different emphasis – different tradeoffs • Complementary, in some ways • Combination can be extremely powerful
What worked well? • • • Specific domain problem Safety properties Shoulders & synergies Separation of concerns Summer interns & visitors Strategic partnership with Windows
Predictions • The holy grail of full program verification has been abandoned. It will probably remain abandoned • Less ambitious tools like powerful type checkers will emerge and become more widely used • These tools will exploit ideas from various analysis disciplines • Tools will alleviate the “chicken-and-egg” problem of writing specifications
Further Reading See papers, slides from: http: //research. microsoft. com/slam http: //research. microsoft. com/~sriram
Glossary Model checking Checking properties by systematic exploration of the state-space of a model. Properties are usually specified as state machines, or using temporal logics Safety properties Properties whose violation can be witnessed by a finite run of the system. The most common safety properties are invariants Reachability Specialization of model checking to invariant checking. Properties are specified as invariants. Most common use of model checking. Safety properties can be reduced to reachability. Boolean programs “C”-like programs with only boolean variables. Invariant checking and reachability is decidable for boolean programs. Predicate A Boolean expression over the state-space of the program eg. (x < 5) Predicate abstraction A technique to construct a boolean model from a system using a given set of predicates. Each predicate is represented by a boolean variable in the model. Weakest precondition The weakest precondition of a set of states S with respect to a statement T is the largest set of states from which executing T, when terminating, always results in a state in S.