Upravljanje DC servo motorima Pokretanje zaustavljanje Promjena smjera

")















- Slides: 22
Upravljanje DC servo motorima • Pokretanje, zaustavljanje • Promjena smjera vrtnja • Promjena brzine
Klasična konstrukcija servo motora podrazumjeva: • Elektronički sklop • DC motor • Mehanika (zupčanici) Upravljanje pomoću mikrokontrolera Elektronika DC motor Mehanika
• Bijela žica – prijenos digitalnog signala • Crvena žica – napajanje • Crna žica - masa 1. Tropolni konektor 2. Vodič između motora i kontrolera , te napajanja 3. Kućište motora
Osim u robotskim konstrukcijama, servomotori mogu se upotrijebiti u industrijiskoj elektronici, mjernoj tehnici, regulacijskoj tehnici, autoindustriji, avioindustriji itd…
Spajanje servo motora na pinove mikroupravljača. Tipkalo RESET na upravljačkoj ploči resetira mikroupravljač, sklopka s tri položaja daje napajanje elektronici (položaj 1) i napajanje motoru (položaj 2).
Motori se mogu napajati naponom baterija Vin - ili stabiliziranim naponom s upravljačke pločice Vdd.
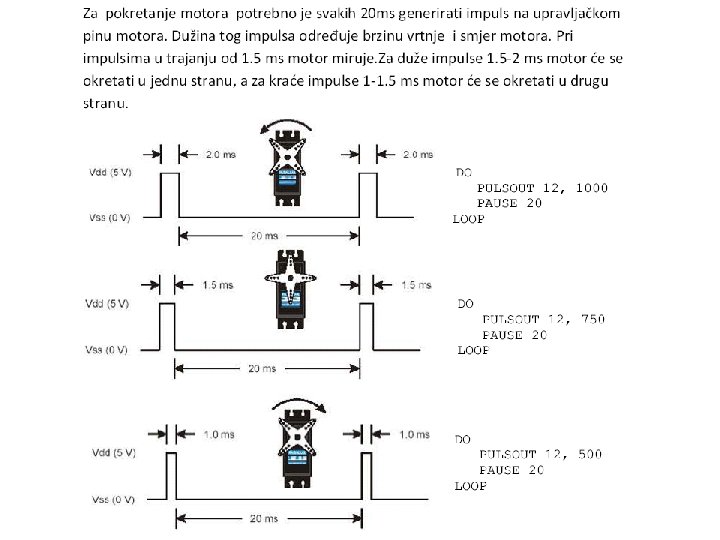
Koliko traje impuls?
Ovako izgledaju servo motori prije montiranja na robot.
Postavljanje motora i baterija za za motore.
Na motore su učvršćeni kotači. Elektronika i napajanje
Upravljačka pločica s RS 232 konektorom.
Postavljanje upravljačke pločice na kućište. Povezivanje napajanja motora
Sastavljen mehanizam i elektronika
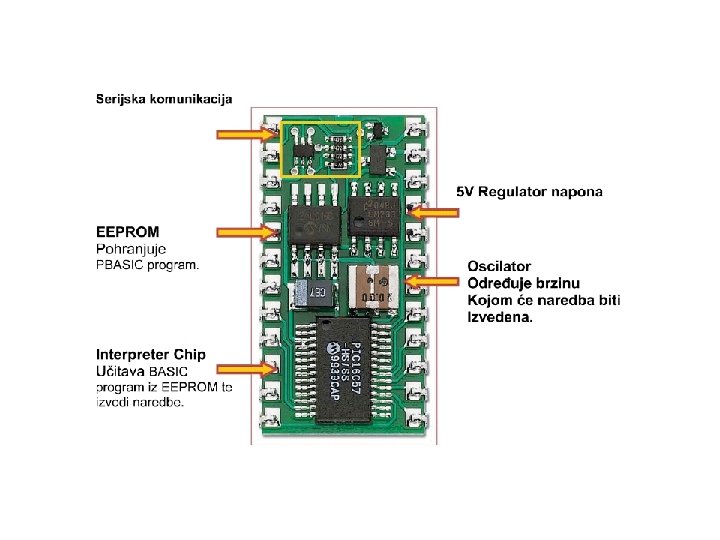
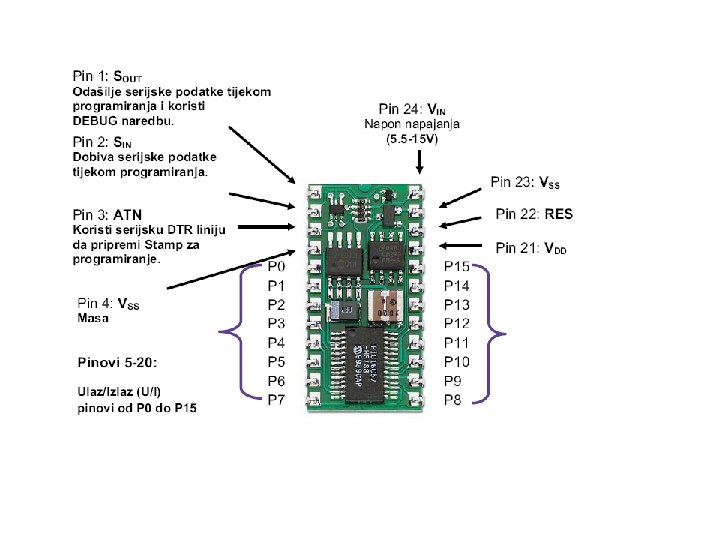
Dijelovi upravljačke ploče
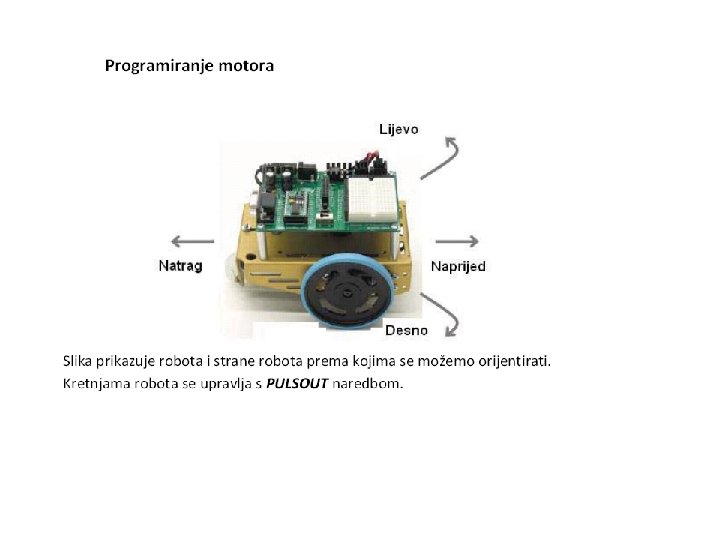
Primjer programiranja motora: 1. Vrtnja lijevo 2. Vrtnja desno 3. Gibanje naprijed 4. Gibanje natrag Ključna je naredba: PULSOUT port, trajanje Motori su povezani na portove 13 i 12. Ako je argument trajanja impulsa 750 tada impuls traje 1, 5 ms i motor stoji. Akoje argument 850 motor se vrti u jednu stranu, a ako je argumen 650 motor se vrti na drugu stranu. Ovdje se koriste dva motora. Vrtnja robota lijevo i desno postiže se na ančin da se dva motora vrte u različitim smjerovima --- ili da jedan motor koči.
'{$stamp bs 2} '{$pbasic 2. 5} irdetectleft VAR Bit irdetectright VAR Bit DO FREQOUT 2, 1, 38500 irdetectleft =IN 0 DEBUG HOME , "irdetectleft=" , BIN 1 irdetectleft PAUSE 100 LOOP Ovo je metoda za ispitivanje IR senzora. Naredba FREQOUT 2, 1, 38500 šalje iz IR diode impulse koji se odbijaju od prepreke i dospjevaju na IR prijemnik demodulator. Ako prijemnik prihvati signal na njegovom pinu generira se nula. Taj pin je spojen na ulaz (IN 0) kontrolera.
Glavni program: Ispituje stanja senzora i u skladu stim daje naredbe motorima. Posljedica toga je kretanje robota uz izbjegavanje prepereka. Potprogrami