UNIVERSIDAD NACIONAL DE INGENIERIA FACULTAD DE INGENIERIA QUIMICA












 con limitaciones inherentes.")





 Fenómeno indeseado: offset, que es un error en")

 y Proporcional P q La acción derivativa aumenta la velocidad de")

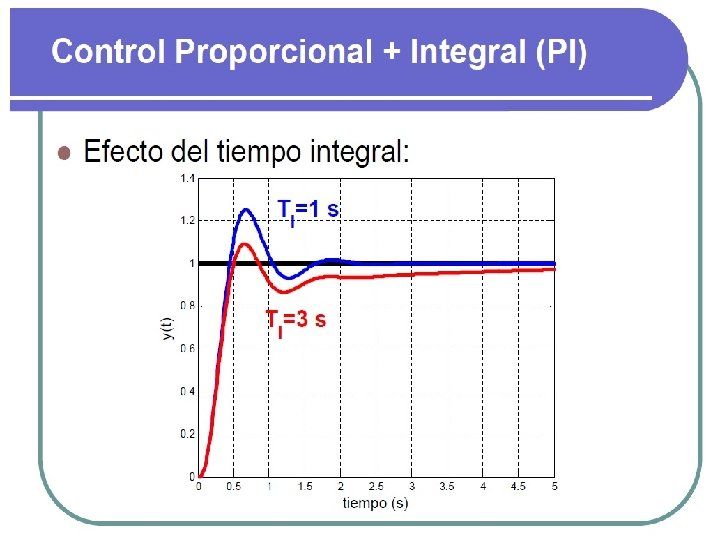
 q La acción integral elimina el offset, ya que la acción")


 q Reúne todas las ventajas de las")








- Slides: 58
UNIVERSIDAD NACIONAL DE INGENIERIA FACULTAD DE INGENIERIA QUIMICA Y MANUFACTURERA CONTROLES ELECTRICOS y AUTOMATIZACION EE - 621 CONTROLADORES TEMAS Controladores, Control de lazo abierto y lazo cerrado. Clasificaciòn, Control OFF-ON, Control Proporcional. Control Derivativo, Control Integral, Control PD, Controlador PID, Aplicaciones de sistemas de control, Sistemas de Control actuales. Sintonizaciòn 1
CONTROLADORES El controlador compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina la desviación y produce una señal de control que reducirá la desviación a cero o a un valor pequeño. . La manera en la cual el controlador automático produce la señal de control se denomina acción de control Los controladores industriales son eléctricos, electrónicos, hidráulicos, neumáticos o alguna combinación de éstos.
COMPORTAMIENTO DE UN SISTEMA DE CONTROL Valor existente 23° 22° 21° Valor Deseado (Set Point)
ENTRADAS Y SALIDAS DEL CONTROLADOR
Clasificación de los Sistemas de Control
DE ACUERDO A LA ACCION DE CONTROL Variable que activa el sistema a controlar LAZO ABIERTO: Acción de control independiente de la salida; para su buen desempeño se requiere de una buena calibración; si el proceso a controlar es estable, no hay riesgo de inestabilidad. LAZO CERRADO: Se compara la entrada y la salida y usa la diferencia (error) como acción de control; se requiere por tanto de una realimentación, la cual genera posibilidad de inestabilidad.
DE ACUERDO A LA FUENTE DE ENERGIA del elemento que genera la acción de control Neumáticos (Aire a presión). Hidráulicos (Aceite o agua a presión). Eléctricos - Electrónicos (Corriente eléctrica).
CLASIFICACION SEGÚN EL TIPO DE ENERGIA 1. - ELECTRICOS 3, . NEUMATICOS e HIDRAULICOS 2. - ELECTRONICOS
SEGÚN LA GENERACION DE LA ACCION DE CONTROL C 1. - CONTROLADOR OFF – ON 2. - CONTROLADOR PROPORCIONAL 3. - CONTROLADOR DERIVATIVO 4, . CONTROLADOR INTEGRATIVO 5. - CONTROLADOR PROPORCIONAL DERIVATIVO 6. - CONTROLADOR PROPORCIONAL INTEGRATIVO 7. - CONTROLADOR PID
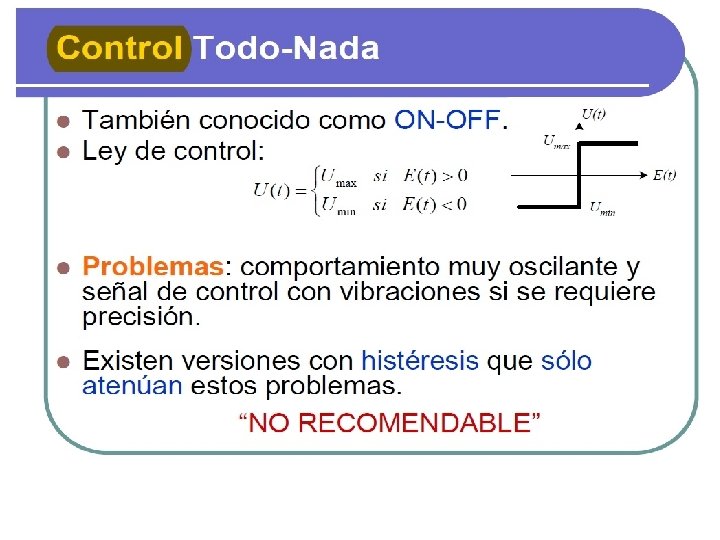
CONTROLADOR OFF - ON Se basa en que el controlador tiene sólo dos estados ON/OFF, abierto/cerrado, Si comparamos el Valor medido con el Valor de referencia, se toma una de las dos posibles acciones dependiendo del signo del error Por ejemplo, en un control de temperatura de un refrigerador: Si la Temperatura > Tref. encender compresor Si la Temperatura < Tref. apagar compresor P
CONTROL OFF -ON ON OFF T Ref. CONTROL OFF – ON CON BRECHA DIFERENCIAL Gap OFF ON T Ref.
1. Controladores On-Off son una solución básica (al problema de control) con limitaciones inherentes. 2. Existen compromisos entre comportamiento de la salida y el natural esfuerzo de control. 3. Necesitamos ser cuidadosos para no utilizar controles muy agresivos cuando están incluidos retardos temporales.
Respuesta de un Controlador ON – OFF Temperatura Referencia Tiempo ON OFF Control
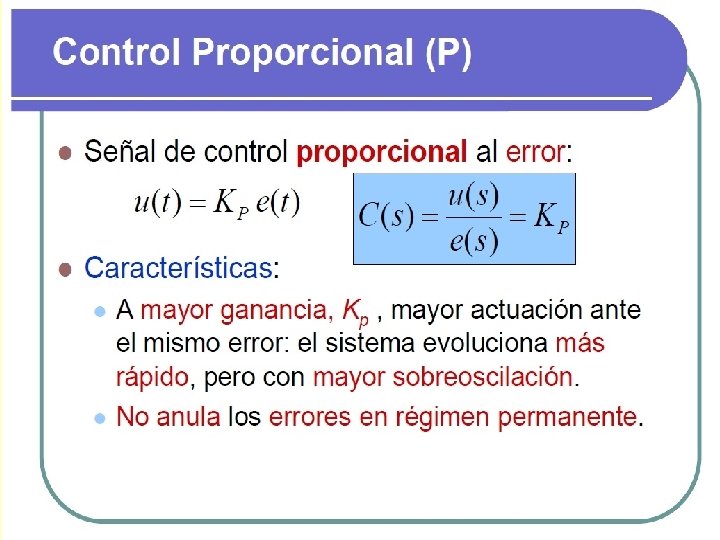
CONTROL PROPORCIONAL El controlador proporcional es aquella en el que el elemento final de control efectúa un movimiento proporcional a la magnitud del error. El factor de proporcionalidad es ajustable
El ajuste correcto de la banda proporcional puede ser observado en la respuesta de la medición a una alteración o señal de entrada de prueba.
Existe un valor límite en la constante proporcional a partir del cual, en algunos casos, el sistema alcanza valores superiores a los deseados. Este fenómeno se llama sobre oscilación y, por razones de seguridad, no debe sobrepasar el 30%, aunque es conveniente que la parte proporcional ni siquiera produzca sobre oscilación. La parte proporcional no considera el tiempo, por lo tanto, la mejor manera de solucionar el error permanente y hacer que el sistema contenga alguna componente que tenga en cuenta la variación respecto al tiempo, es incluyendo y configurando las acciones integral y derivativa.
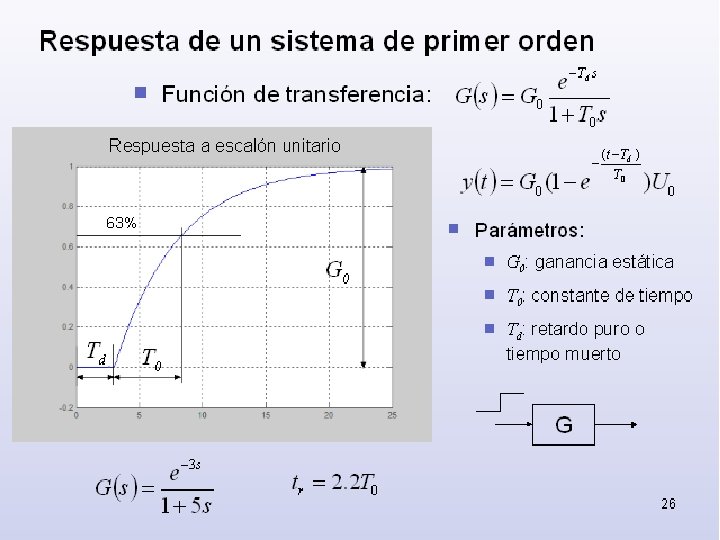
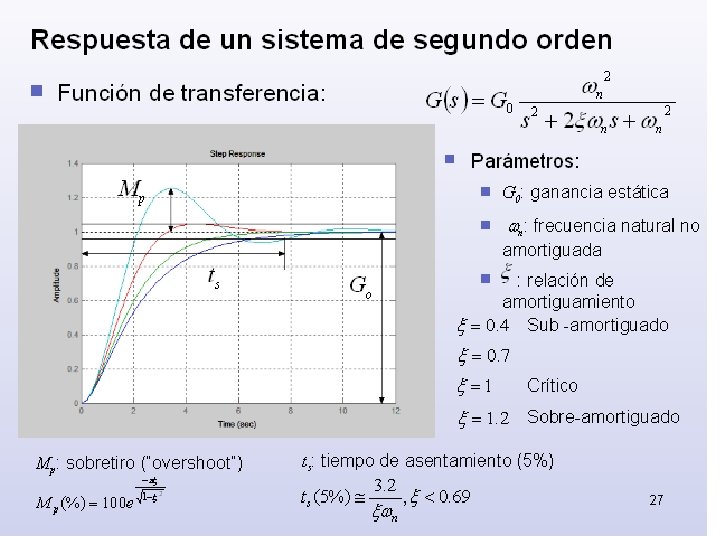
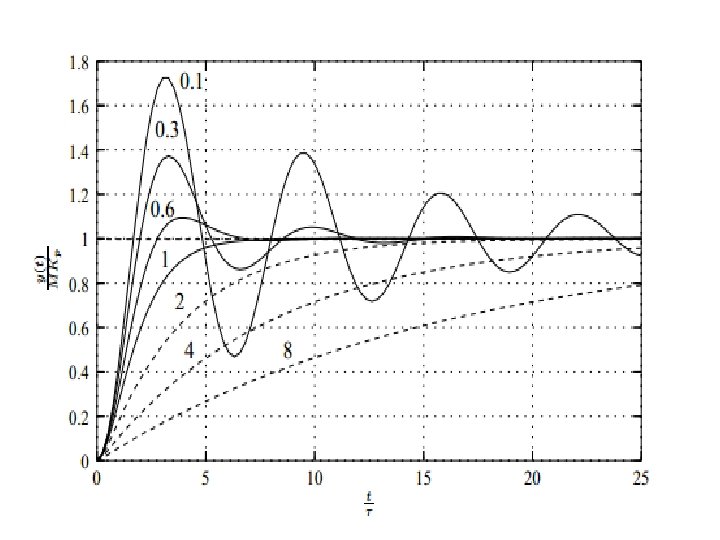
Control proporcional de un sistema de primer orden Control proporcional de un sistema de segundo orden
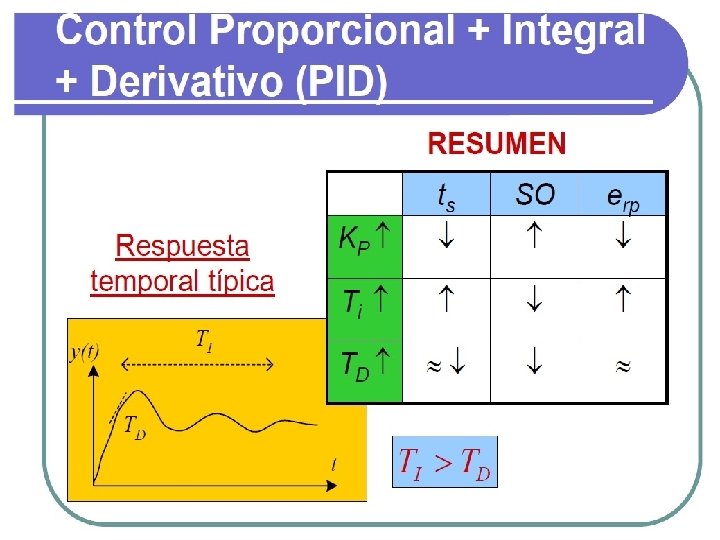
Desventajas de la Acción P (proporcional) Fenómeno indeseado: offset, que es un error en estado estacionario debido a que la acción de control es constante si el error también lo es Para un Kp = 300 se observa en la grafica que • A mayor ganancia el sistema tiene mayor sobreoscilación • Reduce el tiempo de subida • Aumenta el sobreimpulso máximo • Disminuye el tiempo de establecimiento
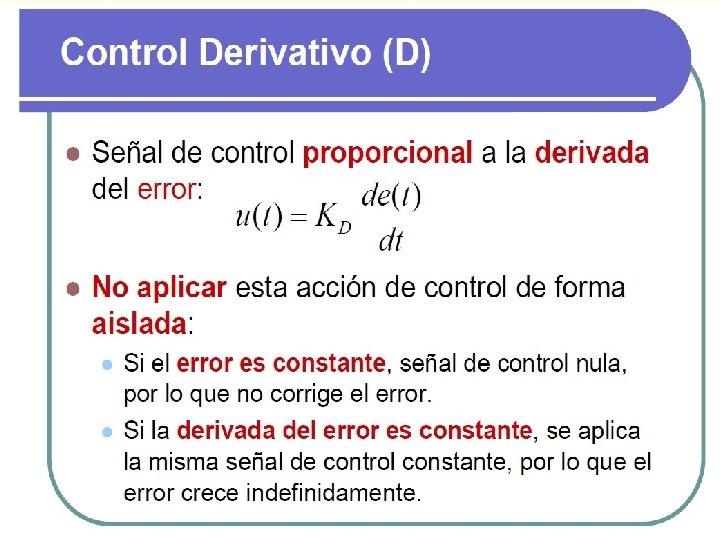
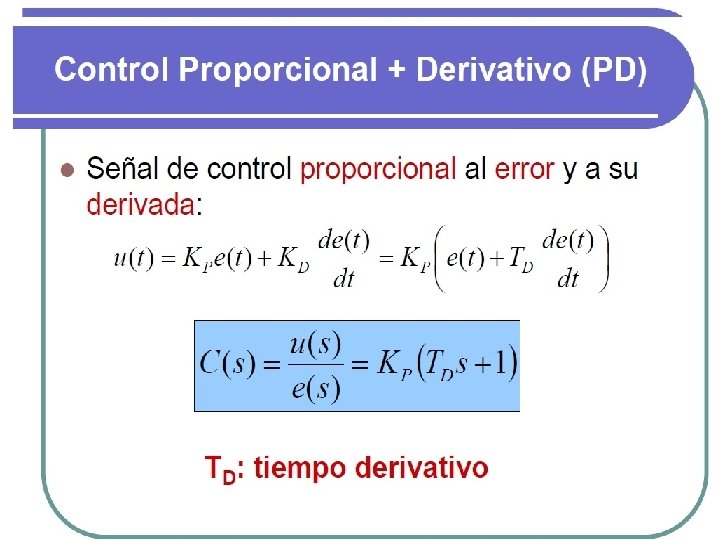
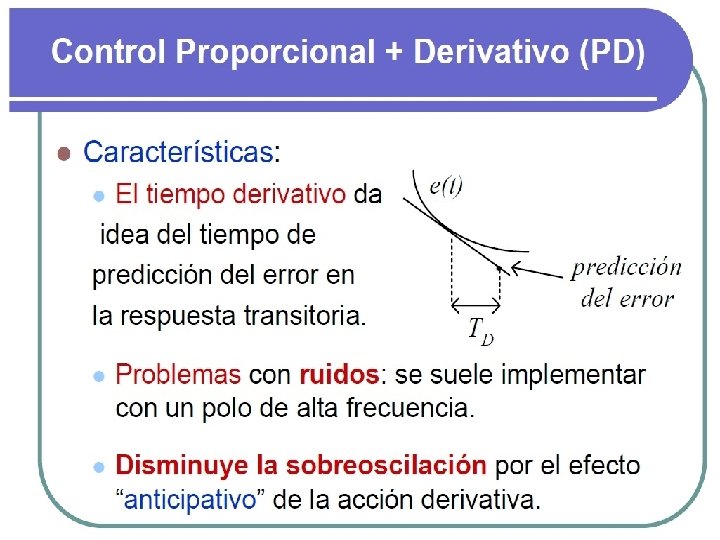
CONTROLADOR DERIVATIVO La acción de control derivativa llamada también control de velocidad, Kd es el intervalo de tiempo en el que la acción de velocidad se adelanta al efecto de acción proporcional. Kd s
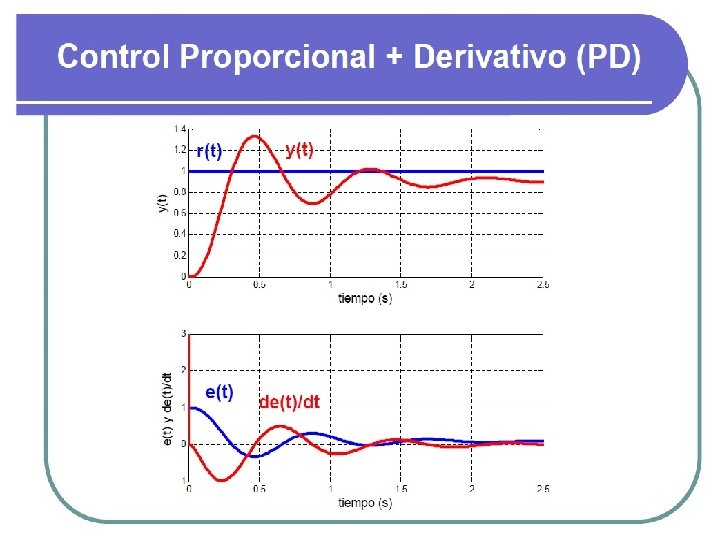
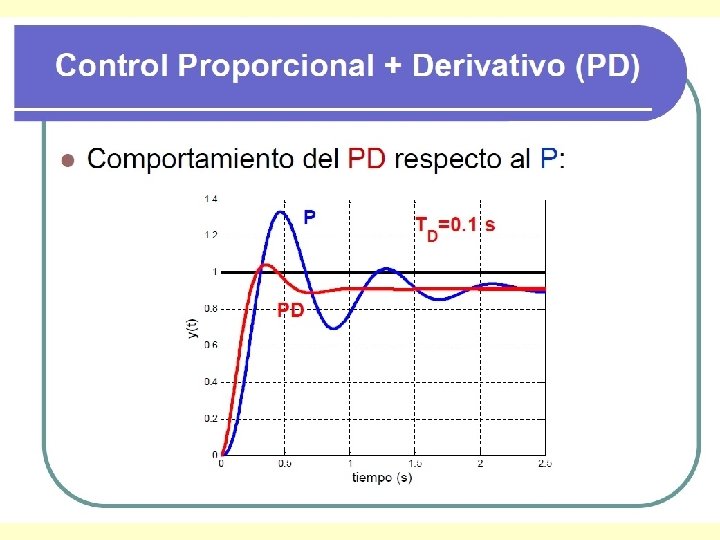
Acción D (Derivativa) y Proporcional P q La acción derivativa aumenta la velocidad de reacción a un cambio del error (acción anticipadora) q D(s) = KP + KDs. q Con Kp = 300 y Kd = 10, § Reduce el sobreimpulso máximo § Disminuye el tiempo de asentamiento § Aumenta el ancho de banda
CONTROLADOR INTEGRATIVO La acción de control integral tiene como propósito disminuir y eliminar el error en estado estacionario.
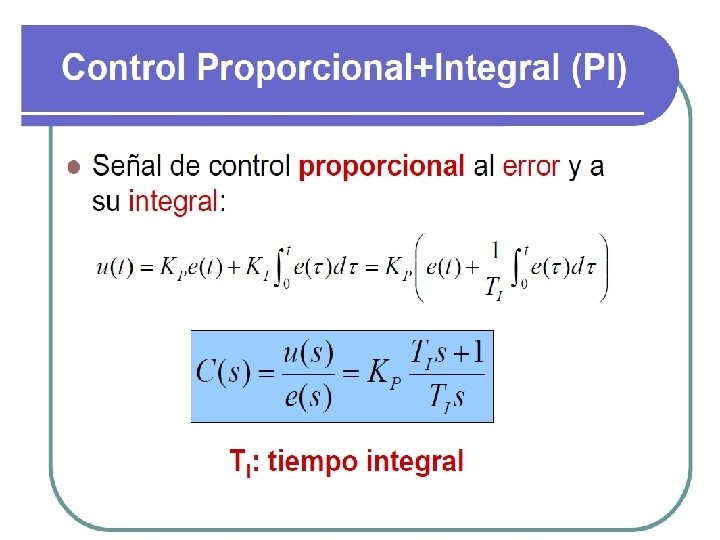
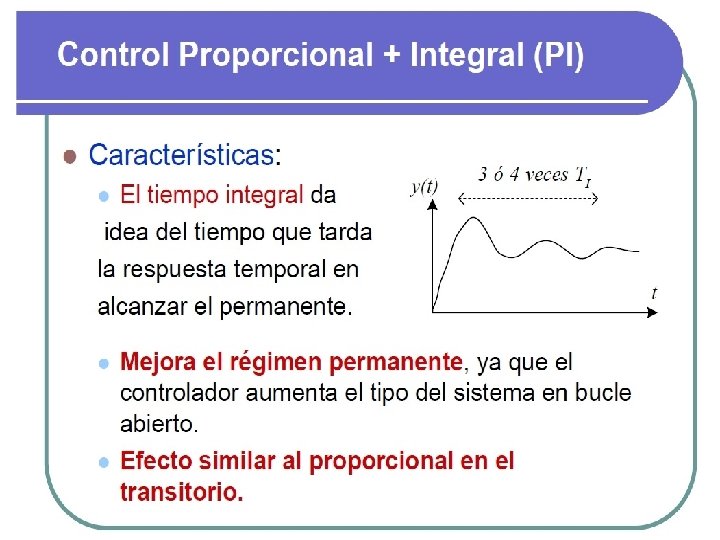
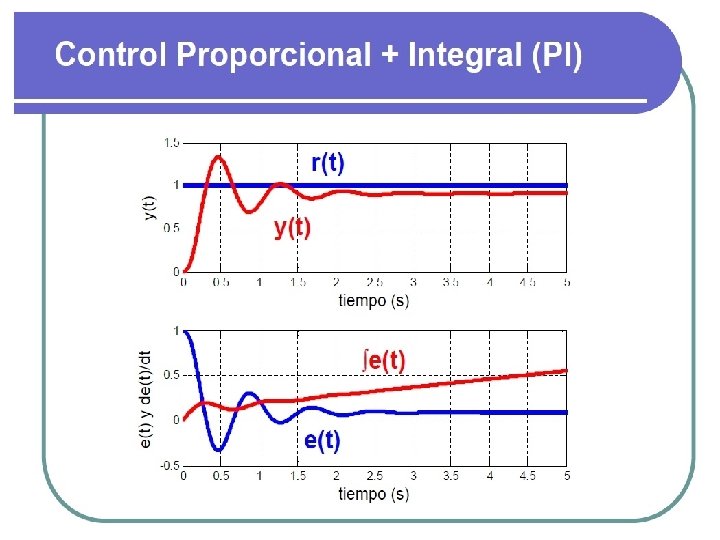
Acción I (Integral) q La acción integral elimina el offset, ya que la acción de control aumenta aunque el error permanezca constante (integra el error). q q Con Kp = 30 y Ki = 70, § Incrementa el tiempo de subida § Reduce el sobreimpulso máximo § Disminuye el tiempo de establecimiento § Mejora el sobreamortiguamiento
CONTROLADOR PID
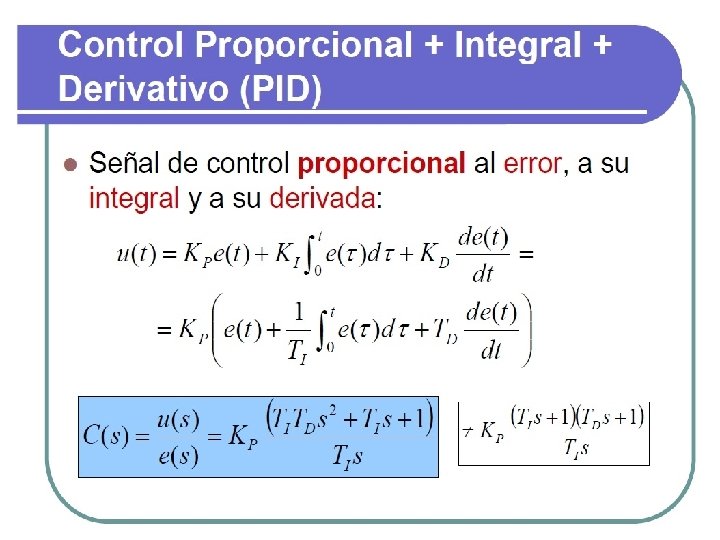
Controladores PID q Aplicación simultánea de 3 acciones: proporcional, integral y derivativa q Es el controlador más utilizado en la práctica por su flexibilidad y ajuste sencillo q Para ver cómo afecta cada una de las acciones a la salida, consideraremos la siguiente planta, cuya respuesta a la entrada escalón aparece a continuación:
Controladores PID (Proporcionales – Integrales - Derivativos) q Reúne todas las ventajas de las acciones P, I y D q q Pero también arrastra los problemas de cada una de las acciones § Saturación de la acción derivativa (la salida se hace muy grande ante cambios repentinos de la señal de error). Se soluciona incluyendo en el término derivativo una constante de relajación α = 0. 05… 0. 2. § Integral windup: debido a la integración de la señal de error. Si hay un sobreimpulso, la acción integral sumará estos errores positivos para generar la acción integral necesaria. Si el error se hace negativo entonces, la dirección de la señal de control no variará para compensar este error mientras la suma del error previo sea dominante.
Parámetros de los Controladores
Parámetros de los Controladores donde: : Es la señal de referencia o punto de ajuste (Set Point) : Es la señal de error : Es la señal de salida del controlador : Es la señal de perturbación : Es la señal o variable de control (variable manipulada) : Es la señal de salida (variable controlada)
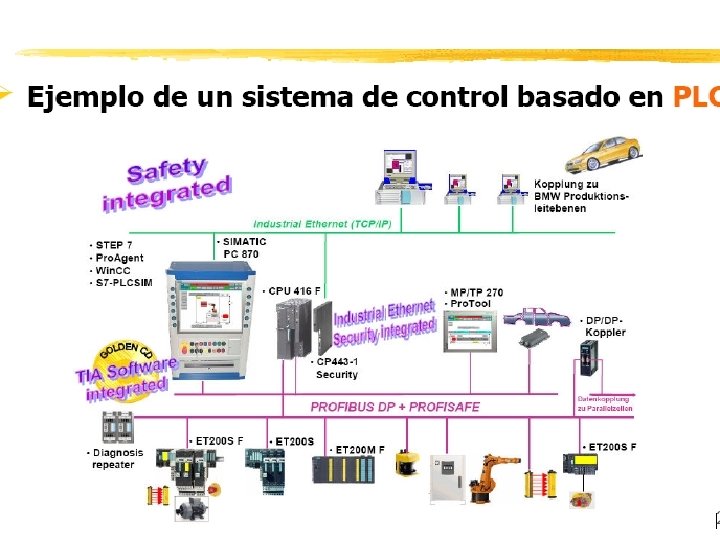
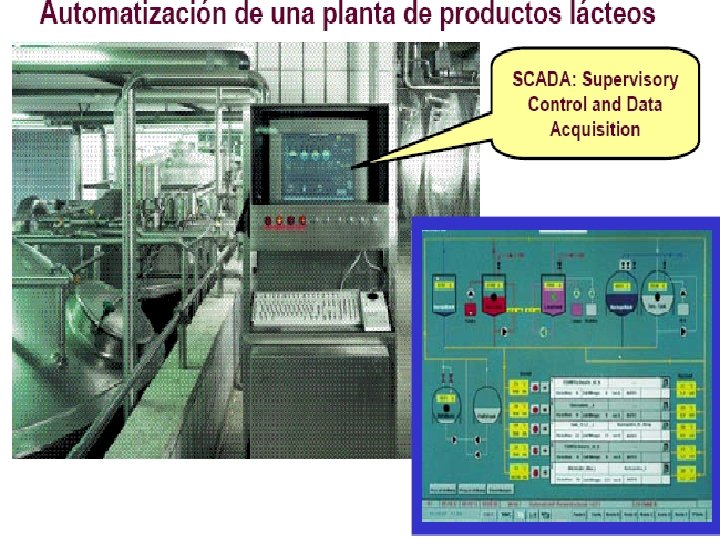
OTROS TIPOS DE CONTROL
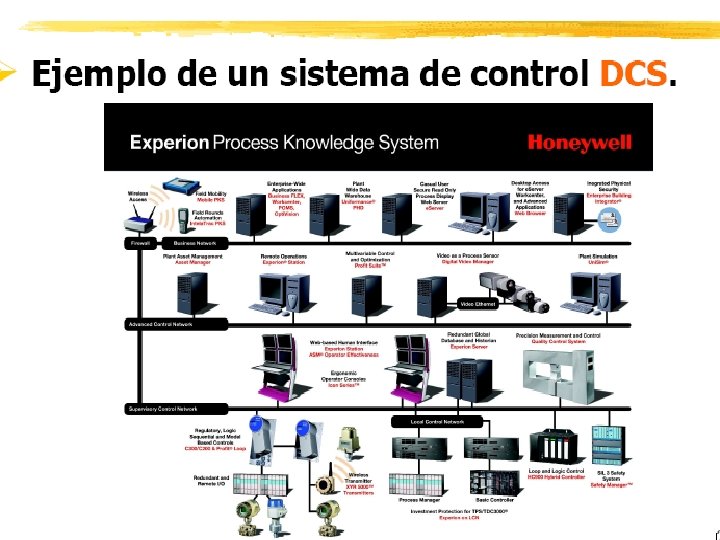
SISTEMA DE CONTROL DISTRIBUIDO
Sintonización de Controladores
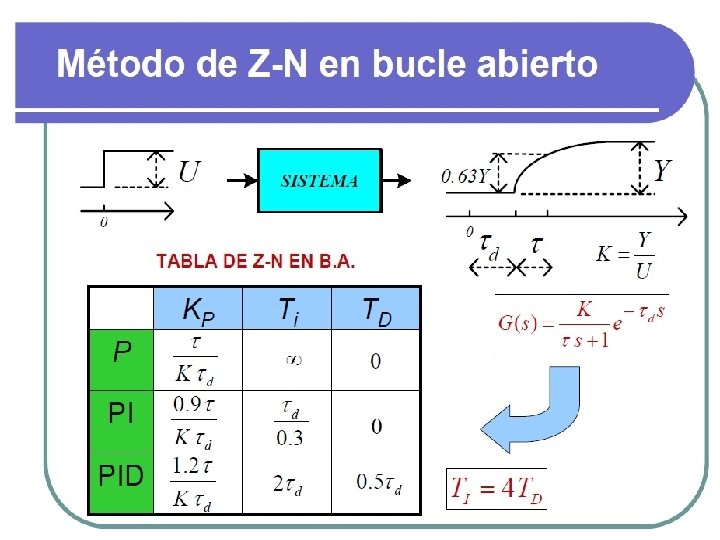
Sintonización de reguladores PID Sintonización: ajuste de los parámetros Kp, Ti y Td para que se satisfagan los requisitos del diseño Métodos clásicos. Se utilizan desde los años 50, y son básicamente un ajuste empírico de los parámetros. Veremos 3 métodos principales: § Método de oscilación de Ziegler-Nichols: halla el valor de la acción proporcional mediante el método de lugar de raíces y calcula el resto de los parámetros mediante unas tablas. § Método de la curva de reacción de Ziegler-Nichols § Método de la curva de reacción de Cohen-Conn Métodos basados en modelo.