UNIT1 Vector Unit1 Review of Vector Analysis Cartesian










")
Point ii) Differential length ii) Differential surfaces iii)Differential volume")

")








 r. P ap")
 B(x 2,")





")




 in aƍ direction dl = dρaρ + ρd. Фa. Ф")


")
")





Differential length ii)Differential surfaces iii)Differential volume")














 B Ɵ A")
")










 XY")





- Slides: 90
UNIT-1 Vector
Unit-1: Review of Vector Analysis �Cartesian, �Cylindrical and �Spherical Co-ordinate Systems, �Vector products, �Projection of Vectors, �Gradient, �Divergence �Curl, �Line, surface, volume integrals, �Divergence Theorem �Stokes theorem
Unit-2 Electrostatics: �Coulomb’s Law, �Electric field intensity, �Evaluation of Electric field intensity due to line charge, Surface charge and Volume charge distribution, �Electric flux density, �Gauss Law, �Electrostatic potential, �Potential gradient, �Electric dipole and Polarization
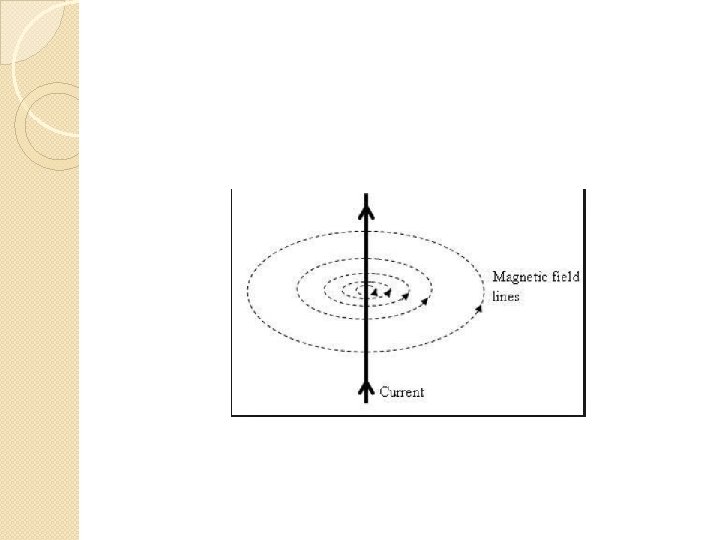
Unit-3 Magnetostatics : �Biot–Savart Law, �Ampere’s Circuital Law, � Magnetic field intensity, �Magnetic field intensity evaluation due to infinite, finite and circular current carrying conductors, �Magnetic flux �Flux density, �Magnetic dipole and Magnetization
Unit-4 Boundary Conditions & Maxwell’s Equations : �Boundary condition at Dielectric – Conductor interface, Dielectric – Dielectric interface, �Boundary conditions for magnetic materials interface, �Current continuity equation, � Maxwell’s equations.
Unit-5 Electromagnetic wave propagation : �Electromagnetic wave equation for free space, lossy dielectric material and perfect conductor, �Propagation constant, � Attenuation constant & Phase shift constant, �Skin depth, �Poynting Theorem, �Reflection of a plain wave in a normal incidence at Dielectric – Dielectric interface, Dielectric – Conductor interfaces
Unit-6 Radiation: : �Scalar and Vector magnetic potential, Retarded potential, Electric & Magnetic fields, �Power radiated and Radiation resistance due to oscillating dipole, Quarter wave monopole & Half wave dipole.
Unit-5 Electromagnetic wave propagation: Electromagnetic wave equation for free space, lossy dielectric material and perfect conductor, Propagation constant, Attenuation constant & Phase shift constant, Skin depth, Poynting Theorem, Reflection of a plain wave in a normal incidence at Dielectric – Dielectric interface, Dielectric – Conductor interfaces. 10 Unit-6 Radiation: Scalar and Vector magnetic potential, Retarded potential, Electric & Magnetic fields, Power radiated and Radiation resistance due to oscillating dipole, Quarter wave monopole & Half wave dipole.
Cartesian coordinate system 2 What is a vector? 1 Unit-1 Vector 6 Divergence, curl, gradient, divergence theorem, stokes theorem Cylindrical coordinate system 3 4 5 Scalar product &vetor product Spherical Coordinate system
Vector analysis is a mathematical tool with which electromagnetic concepts are more conveniently expressed and best comprehended. Since use of vector analysis in the study of electromagnetic field theory results in real economy of time and thought.
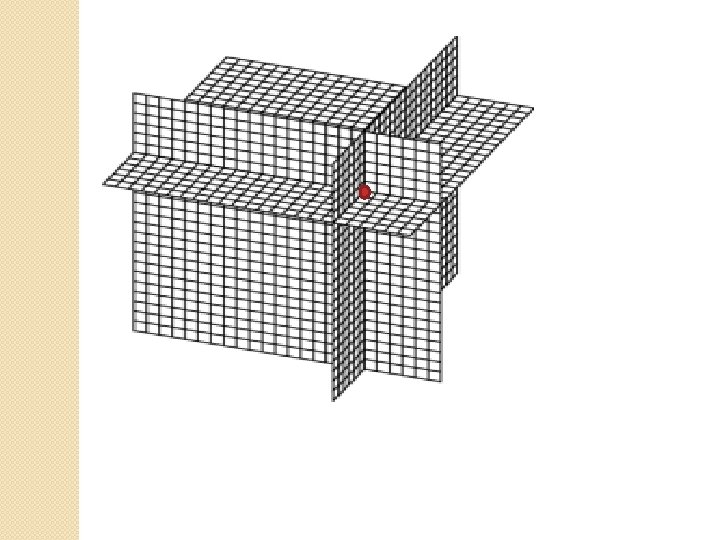
Cartesian Coordinate system Rectangle(cartisian )
Cartesian co-ordinates system i)Point ii) Differential length ii) Differential surfaces iii)Differential volume
Point representation
p(x 0, y 0, Z 0)
Differential Length dz dx dy
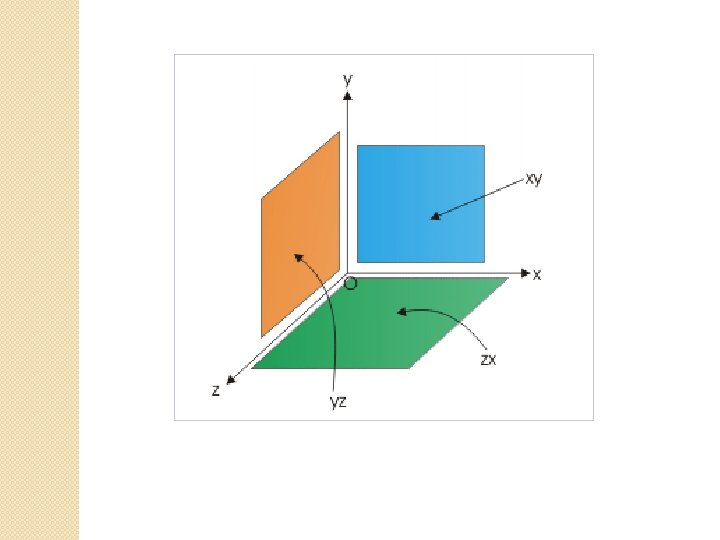
Differential Surface
Y
Z az ay -ay ax X -ax -az Y
z Ds 2=-dxdz ay dz dx Ds 2=+dxdz ay y dy Ds 1=dydz ax x Ds 1=+dydzax Ds 2=+dxdzay Ds 3=+dxdyaz
Differential Volume
Differential volume z dz dx dy Dv=dxdydz x y
Position Vector
p(x 0, y 0, Z 0) r. P ap
Displacement Vector Z Displacement vector A(x 1, y 1, z 1 ) B(x 2, y 2, z 2) r. A r. B Y X
Rectangular coordinate system Cylindrical coordinate system
Cylindrical Coordinate system Cylinder
CYLINDRICAL COORDINATE SYSTEM �Point �Differential length �Differential surfaces �Differential volume
Point representation
�Why did we take as a differential length in rectangular coordinate system?
p(x 0, y 0, Z 0)
Cylindrical Coordinate system z ρ=radius of cylinder Z =height of cylinder Φ=angle made by ρ with positive x-axis A(ρ, φ, z) Z ρ ρ φ x y
z ρ=radius of cylinder Z =height of cylinder Φ=angle made by ρ with positive x-axis Point A(ρ, φ, z) Z ρ ρ φ x y
Differential Length in cylindrical coordinate system �dl = dρaρ + ρd. Фa. Ф + dz az
�Why did we take rectangular surfaces in rectangular coordinate system?
First Plane (varying ƍ) in aƍ direction dl = dρaρ + ρd. Фa. Ф + dz az dz
z dl = dρaρ + ρd. Фa. Ф + dz az Second plane(varying Ф ) in a. Ф direction dz y φ1 dƍ x
dl = dρaρ + ρd. Фa. Ф + dz az Third Plane (varying Z) in az direction z
Unit vectors in rectangular and cylindrical co ordinate system a z p(x, y, z) a y ax aØ aƍ
Conversion between Cartesian and Cylindrical coordinate system
Differential Length in cylindrical coordinate system �dl = dρaρ + ρd. Фa. Ф + dz az
Differential surfaces in cylindrical coordinate system �dl = dρaρ + ρd. Фa. Ф + dz az
Differential volume dv = dρρd. Фdz dv = ρdρd. Фdz
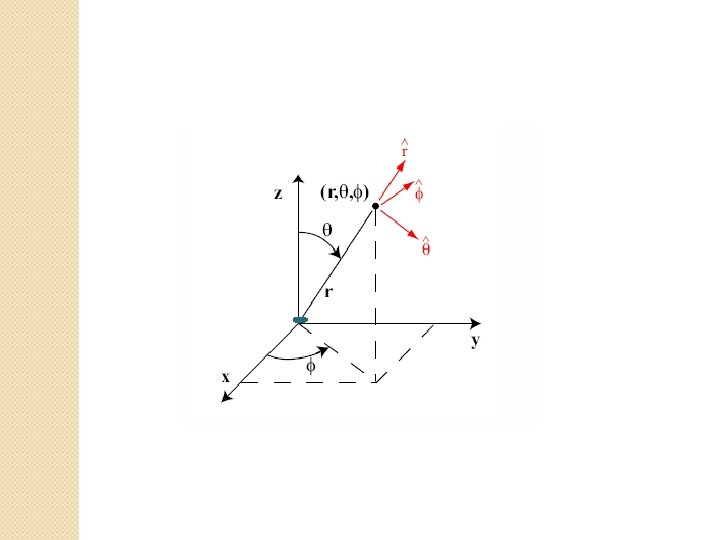
Spherical Coordinate system Sphere
Spherical Co-ordinates system i)Differential length ii)Differential surfaces iii)Differential volume
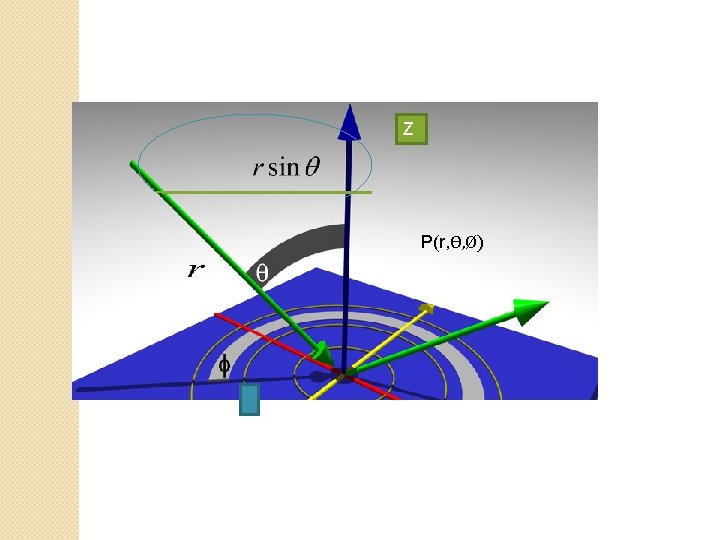
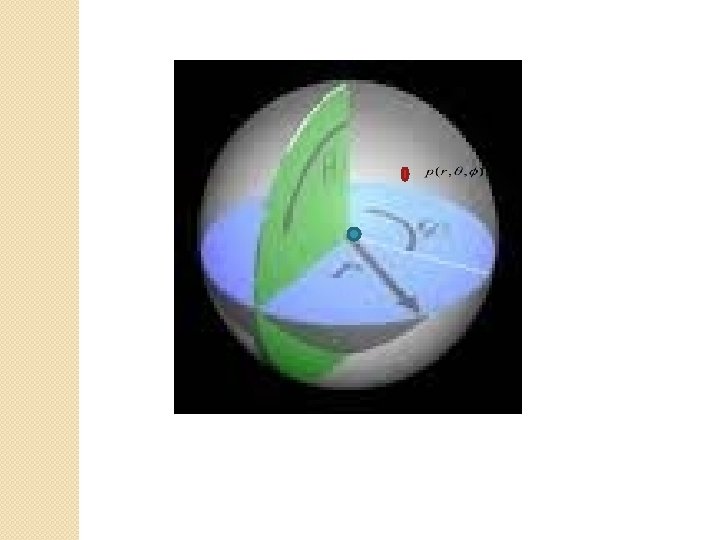
Point representation in spherical coordinate system
r = radius of sphere Ɵ = angle made by r to the positive z-axis Ø = angle made by rsinƟ with positive x-axix r
Z
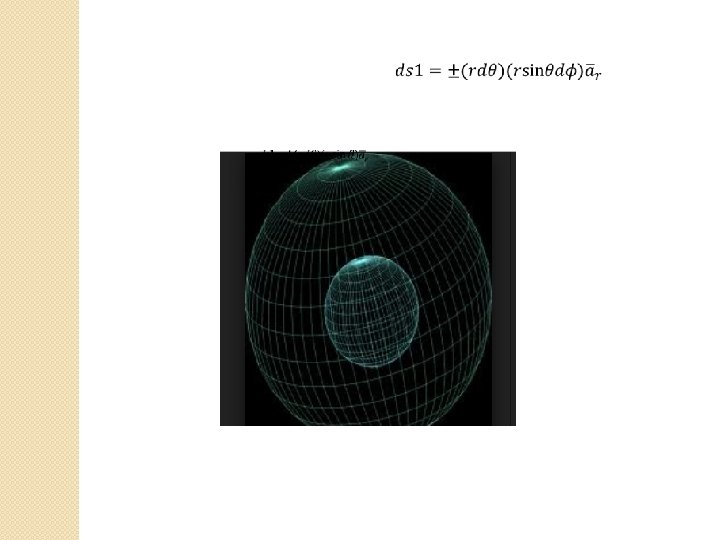
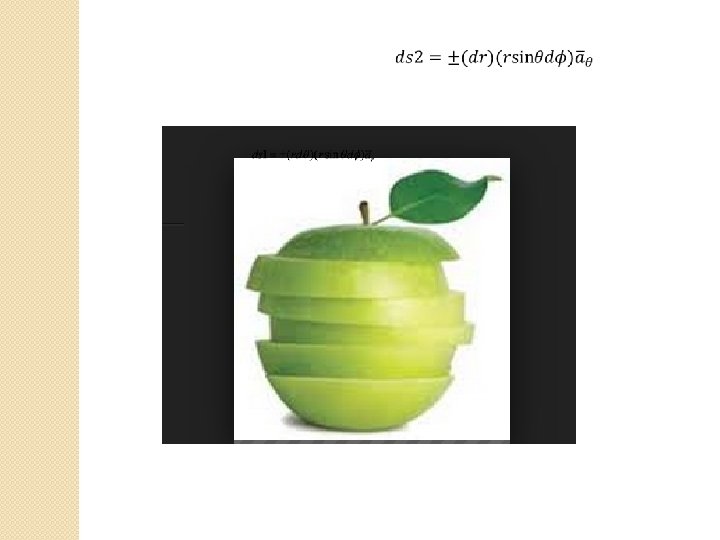
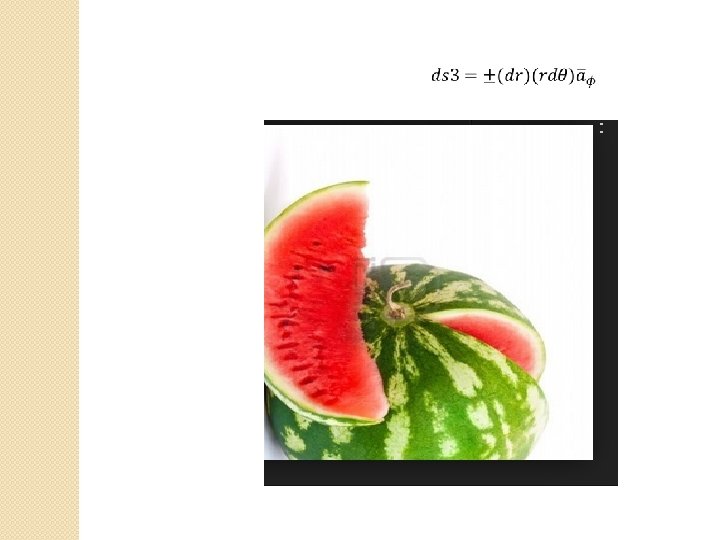
Differential length
Unit vectors in Spherical coordinate system
Z
Conversion between spherical and Cartesian coordinates
Transformation of vector from Cylindrical to Cartesian
Transformation of vector from Cartesian to cylindrical or vice versa
Transformation of vector from Spherical to Cartesian coordinate system
Transformation of vector from Cartesian to Spherical coordinate system
Scalar Product(Dot Product) B Ɵ A
Vector product(Cross product)
Divergence of vector in different coordinate system Cartesian Coordinate system Cylindrical Co-ordinates system Spherical Co-ordinates system
Divergence Theorem The volume integral of the divergence of vector field D taken over any volume V is equal to the surface integral of D taken over the closed surface enclosing the volume V
Curl
Gradient �V –Scalar field
Stoke’s theorem �It stats that integration of tangential component of vector field along the closed path is equal to integral of normal component of curl of the vector field over the surface enclosed by the closed path.
Line
Z Line X=2, Z=4 Means || to Y axis 2 4 Y X
Line Y=4, Z=2 Mean || to X axis Z 4 2 Y X
Z Line X=1, Y=2 Mean || to Z axis 1 2 Y X
Line is at x=3 , y=5 Means parellel to z axis (3, 5) XY plane
Plane
z Y=4 plane or xz plane ay Y=4 x y
az Z=4 plane or YZplane z Z=4 y x
X=4 plane or yz plane z y x=4 a x x
z Y=4 plane or xz plane Y=4 x y