Too slow Just right Too fast Less voltage

 7")

![Συνολική εικόνα Variable Range Name Type Params Service [0 10] poor gaussmf [1. 5](https://slidetodoc.com/presentation_image_h2/170d5de9a7b19da19e4b21bb395e7191/image-17.jpg "Συνολική εικόνα Variable Range Name Type Params Service [0 10] poor gaussmf [1. 5")
 20")


 (1 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg.")
 (2 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg.")
 (3 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg.")
 (4 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg.")
 (5 από 5) ANGULAR VELOCITY ANGLE Ø 1. 2.")

- Slides: 42
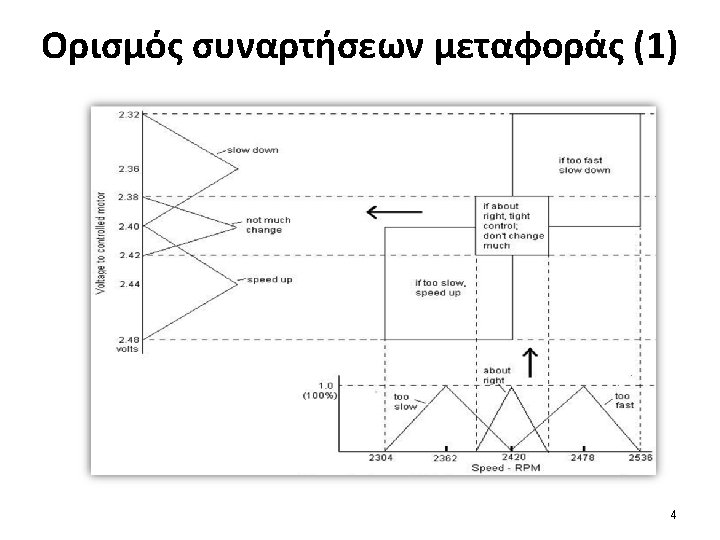
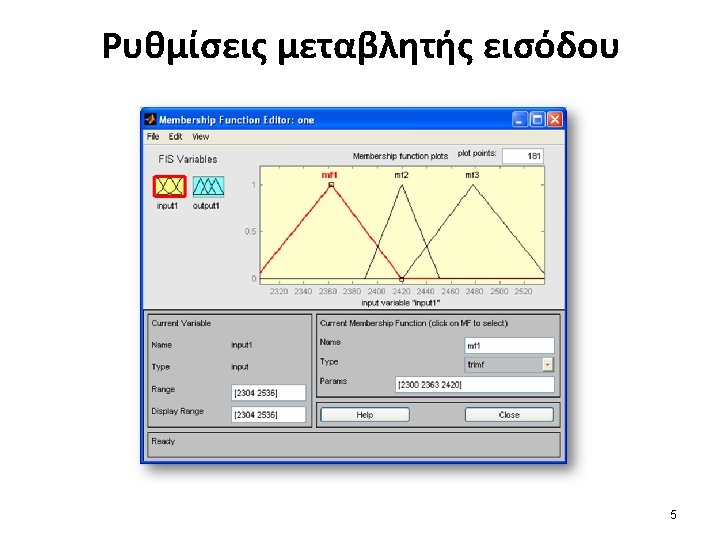
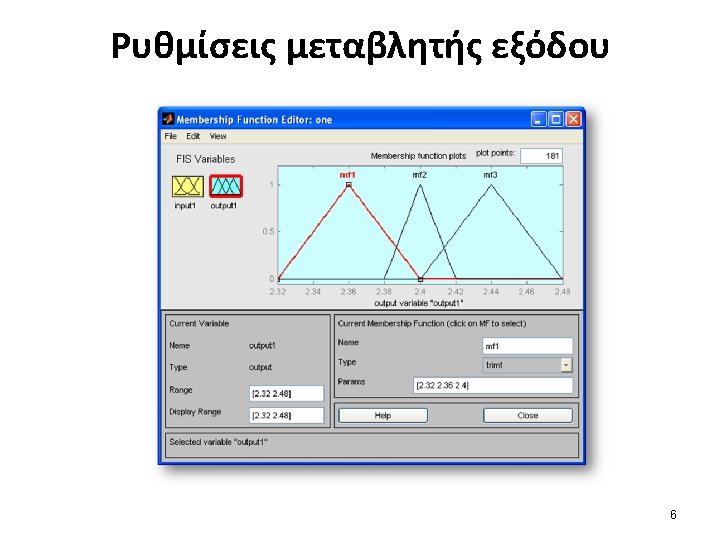
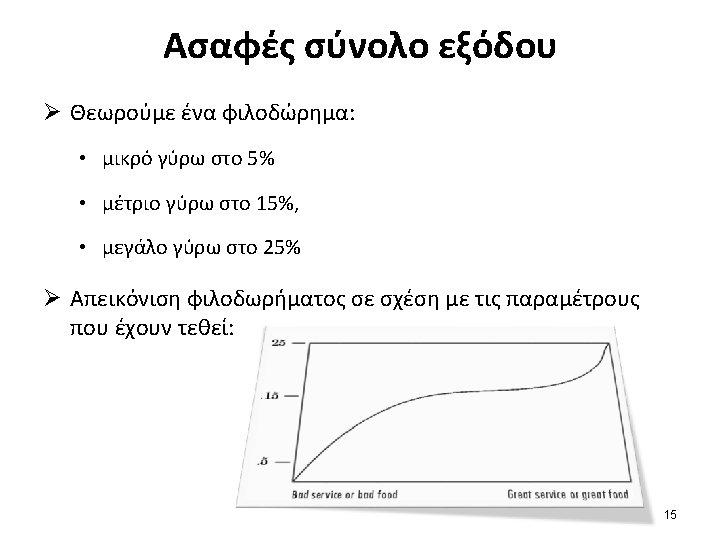
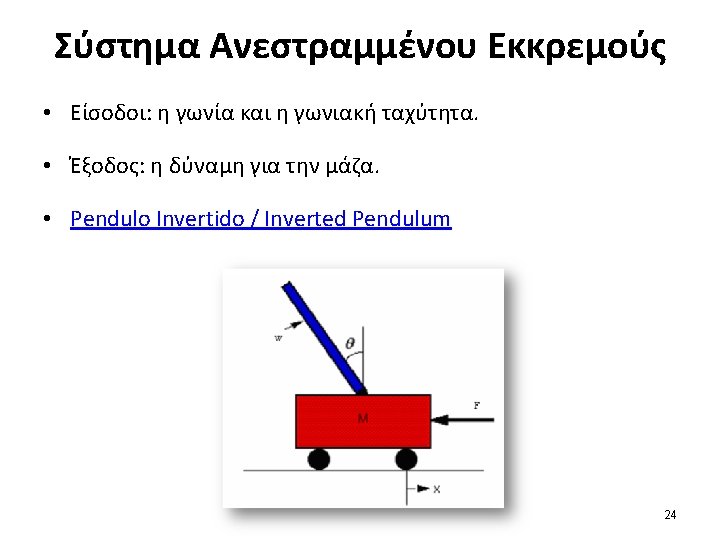
Καθορισμός παραμέτρων Ø Ασαφές σύνολο εισόδου: • Too slow • Just right • Too fast Ø Ασαφές σύνολο εξόδου: • Less voltage (Slow down) • No change • More voltage (Speed up) Ø Κανόνες: • If the motor is running too slow, then more voltage. • If motor speed is about right, then no change. • If motor speed is too fast, then less voltage. 3
Rule Editor (1) 7
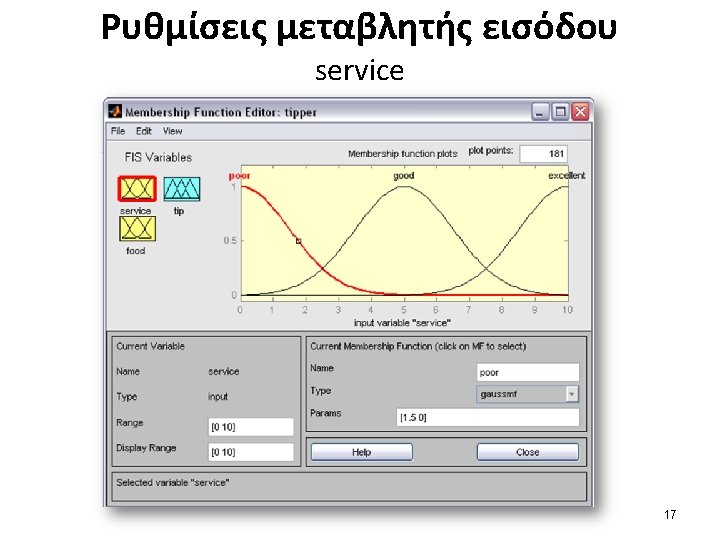
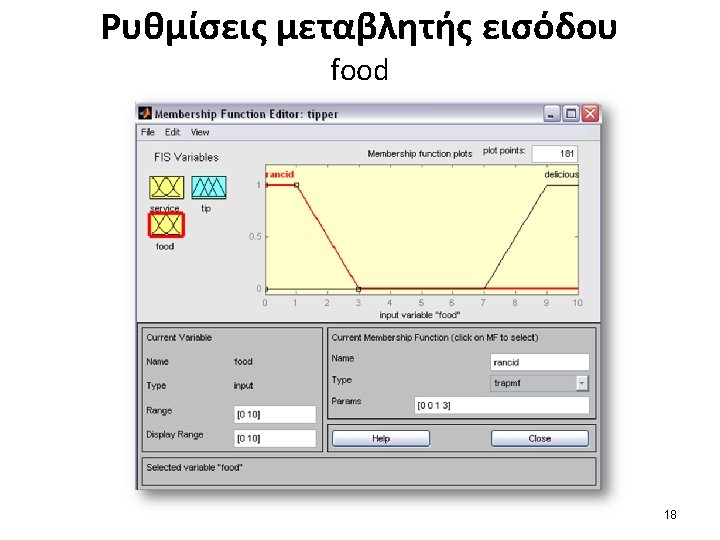
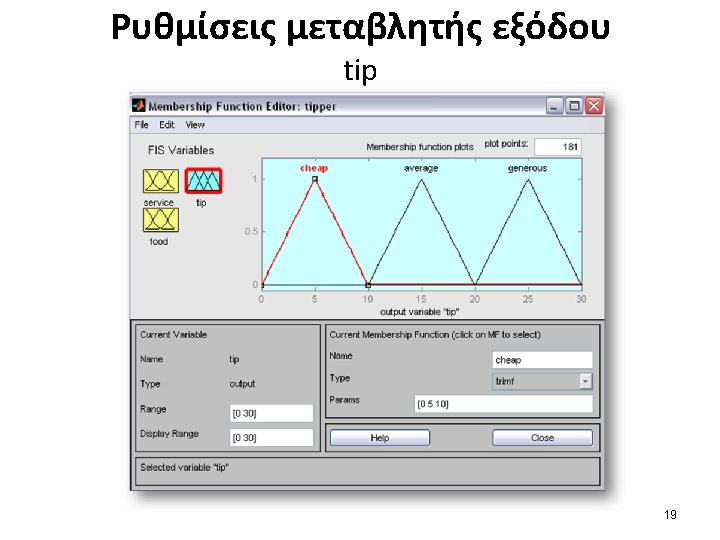
Συνολική εικόνα Variable Range Name Type Params Service [0 10] poor gaussmf [1. 5 0] Food Tip [0 10] [0 30] good [1. 5 5] excellent [1. 5 10] rancid trapmf [0 0 1 3] delicious [7 9 10 10] cheap [0 5 10] average generous trimf [10 15 20] [20 25 30] Rules 1. If the service is poor or the food is rancid, then tip is cheap 2. If the service is good, then tip is average 3. If the service is excellent or the food is delicious, then tip is generous 16
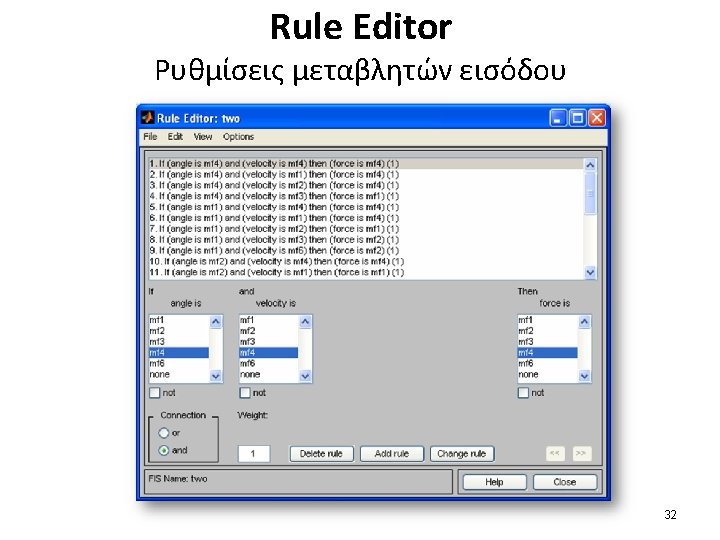
Rule Editor (2) 20
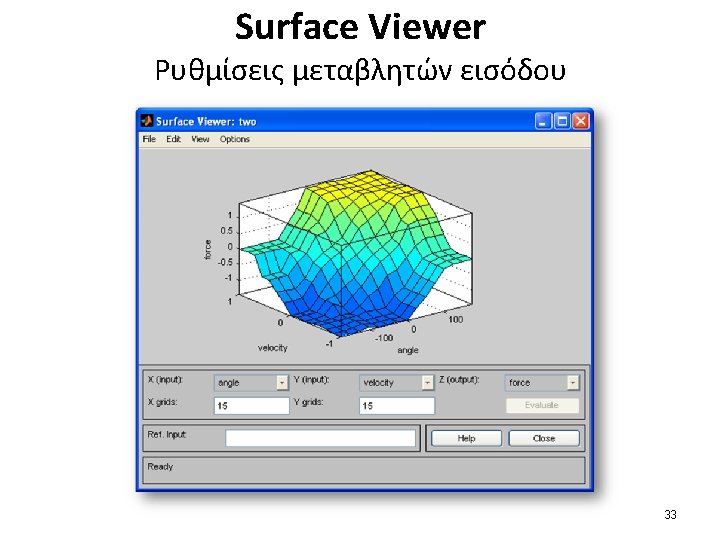
Surface Viewer 21
Rule Viewer 22
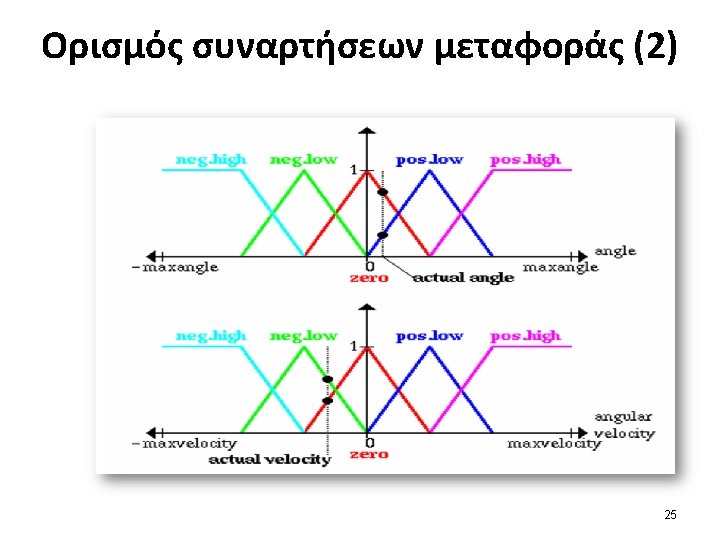
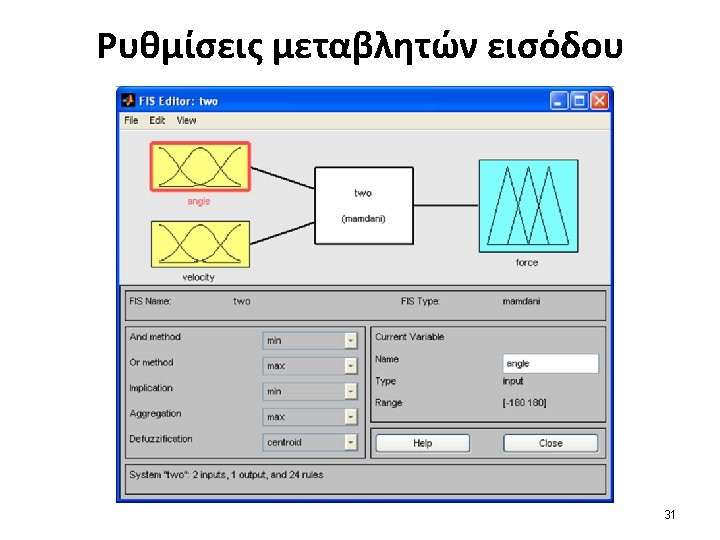
Καθορισμός κανόνων (Σύστημα Ανεστραμμένου Εκκρεμούς) (1 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg. Low Zero Pos. Low Pos. High Neg. Low Zero Neg. Low Neg. High Neg. Low Zero Pos. Low Zero Neg. High Neg. Low Zero Pos. Low Pos. High Pos. Low Neg. Low Zero Pos. Low Pos. High 26
Καθορισμός κανόνων (Σύστημα Ανεστραμμένου Εκκρεμούς) (2 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg. Low Zero Pos. Low Pos. High Neg. Low Zero Neg. Low Neg. High Neg. Low Zero Pos. Low Zero Neg. High Neg. Low Zero Pos. Low Pos. High Pos. Low Neg. Low Zero Pos. Low Pos. High Ø Παραδείγματα 1. If angle is zero and velocity is zero then force is zero 27
Καθορισμός κανόνων (Σύστημα Ανεστραμμένου Εκκρεμούς) (3 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg. Low Zero Pos. Low Pos. High Neg. Low Zero Neg. Low Neg. High Neg. Low Zero Pos. Low Zero Neg. High Neg. Low Zero Pos. Low Pos. High Pos. Low Neg. Low Zero Pos. Low Pos. High Ø Παραδείγματα 1. If angle is zero and velocity is zero then force is zero 2. If angle is zero and velocity is NL then force is NL 28
Καθορισμός κανόνων (Σύστημα Ανεστραμμένου Εκκρεμούς) (4 από 5) ANGULAR VELOCITY ANGLE Neg. High Neg. Low Zero Pos. Low Pos. High Neg. Low Zero Neg. Low Neg. High Neg. Low Zero Pos. Low Zero Neg. High Neg. Low Zero Pos. Low Pos. High Pos. Low Neg. Low Zero Pos. Low Pos. High Ø Παραδείγματα 1. If angle is zero and velocity is zero then force is zero 2. If angle is zero and velocity is NL then force is NL 3. If angle is PL and velocity is zero then force is PL 29
Καθορισμός κανόνων (Σύστημα Ανεστραμμένου Εκκρεμούς) (5 από 5) ANGULAR VELOCITY ANGLE Ø 1. 2. 3. 4. Neg. High Neg. Low Zero Pos. Low Neg. High Neg. Low Zero Neg. Low Neg. High Neg. Low Zero Pos. Low Zero Neg. High Neg. Low Zero Pos. Low Pos. High Pos. Low Neg. Low Zero Pos. Low Pos. High Παραδείγματα If angle is zero and velocity is zero then force is zero If angle is zero and velocity is NL then force is NL If angle is PL and velocity is zero then force is PL If angle is PL and velocity is NL then force is zero Pos. High 30
Χρήσιμες συνδέσεις Ø Autonomous Parallel Parking Robot Ø xpark! Automatic Parking - Op. II "metal tree guard“ Ø Fuzzy Logic and Robotic Control with NI Compact-RIO Ø Inverted Pendulum - Fuzzy Logic - Testing Ø Péndulo Invertido Lineal @ UPRM Ø RME-2 R -Robô Movel Equilibrado sobre 2 Rodas Ø [Python] Fuzzy logic car controller 34