Time domain response specifications Defined based on unit

Time domain response specifications • Defined based on unit step response with i. c. = 0 • Defined for closed-loop system

Prototype nd 2 target order system:

Prototype 2 nd order system:

Remember: Settling time:

Effects of additional zeros Suppose we originally have: i. e. step response Now introduce a zero at s = -z The new step response:

Effects: • Increased speed, • Larger overshoot, • Might increase ts

When z < 0, the zero is at -z and is > 0, is in the right half plane. Such a zero is called a nonminimum phase zero. A system with nonminimum phase zeros is called a nonminimum phase system. Nonminimum phase zero should be avoided in design. i. e. Do not introduce such a zero in your controller.

Effects of additional pole Suppose, instead of a zero, we introduce a pole at s = -p, i. e.

L. P. F. has smoothing effect, or averaging effect Effects: • Slower, • Reduced overshoot, • May increase or decrease ts

Stability • BIBO-stable: Def: A system is BIBO-stable if all bounded input always produces bounded output. Otherwise it’s not BIBO-stable.

Asymptotically Stable A system is asymptotically stable if for any arbitrary initial conditions, all small signal variables in the system converge to 0 as t→∞ when input=0. A system is marginally stable if for all initial conditions, all variables in the system remain finite, but for some initial conditions, some variable does not converge to 0 as t→∞. A system is unstable if there are initial conditions that can cause some variables in the system to diverge to infinity. A. S. , M. S. and unstable are mutually exclusive.

Asymptotically Stable

Asymptotically Stable vs BIBO-stable Thm: If a system is A. S. , then it is BIBO-stable If a system is not BIBO-stable, then it cannot be A. S. , it has to be either M. S. or unstable. But BIBO-stable does not guarantee A. S. in general. If there is no pole/zero cancellation, then BIBO-stable Asymp Stable

Characteristic polynomials Three types of models: Assume no p/z cancellation System characteristic polynomial is:

A polynomial is said to be Hurwitz or stable if all of its roots are in O. L. H. P A system is stable if its char. polynomial is Hurwitz A nxn matrix is called Hurwitz or stable if its char. poly det(s. I-A) is Hurwitz, or if all eigenvalues have real parts<0

Routh-Hurwitz Method From now on, when we say stability we mean A. S. / M. S. or unstable. We assume no pole/zero cancellation, A. S. BIBO stable M. S. /unstable not BIBO stable Since stability is determined by denominator, so just work with d(s)

Routh Table
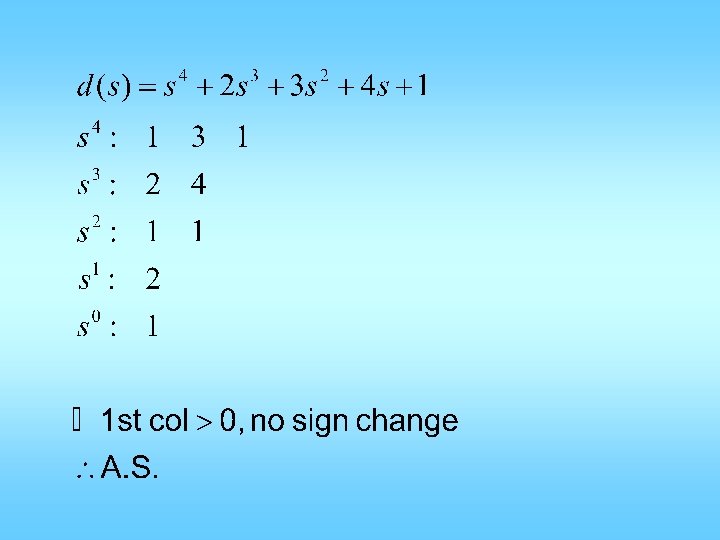
 d(s) is A. S.")
Repeat the process until s 0 row Stability criterion: 1) d(s) is A. S. iff 1 st col have same sign 2) the # of sign changes in 1 st col = # of roots in right half plane Note: if highest coeff in d(s) is 1, A. S. 1 st col >0 If all roots of d(s) are <0, d(s) is Hurwitz

Example: ←has roots: 3, 2, -1
/1=-7 (1*102*0)/1=10 (-7*51*10)/-7")
(1*32*5)/1=-7 (1*102*0)/1=10 (-7*51*10)/-7

Remember this

Remember this

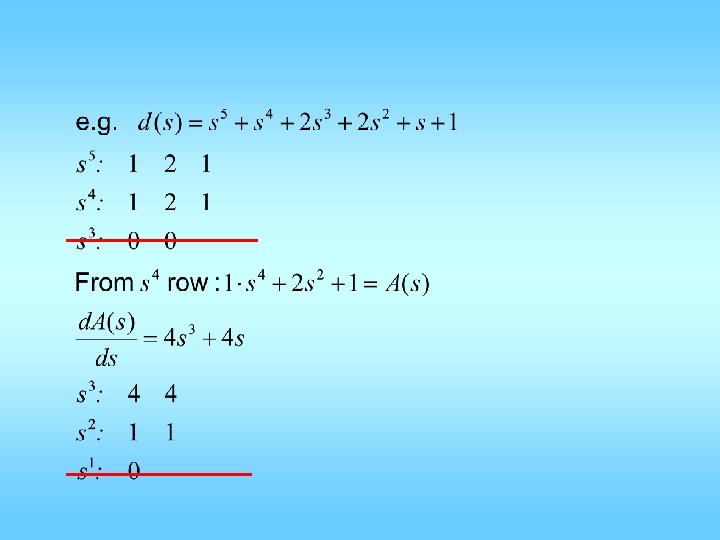
e. g.
 A. S. 1 st col. all same sign (2)#sign")
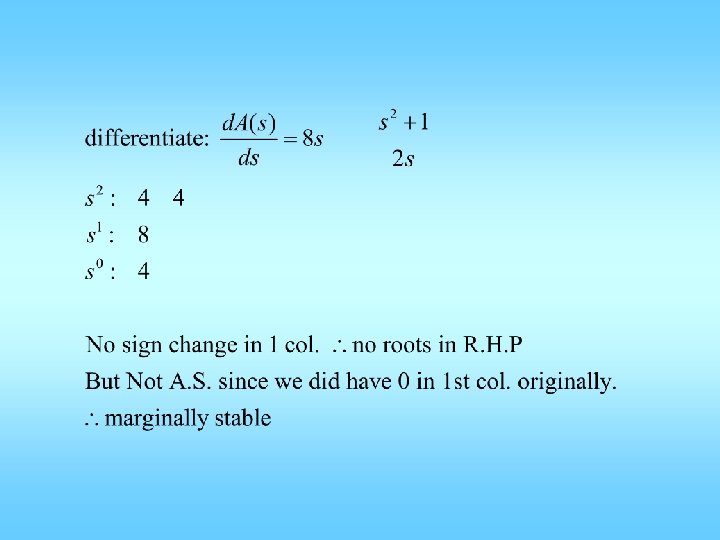
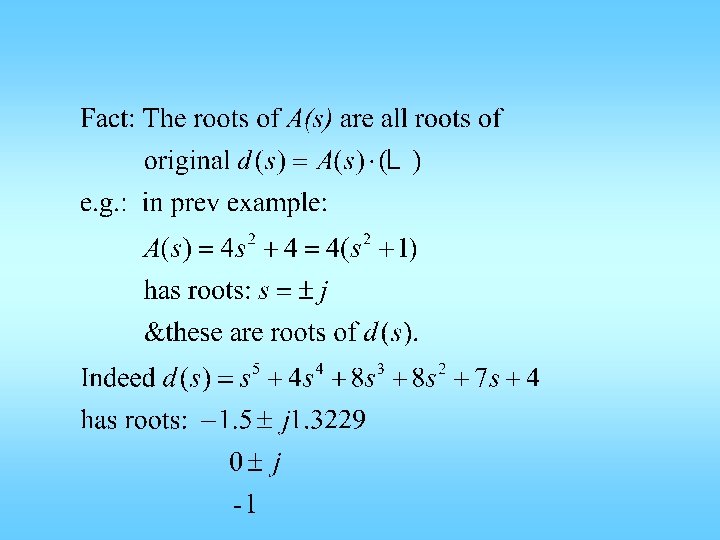
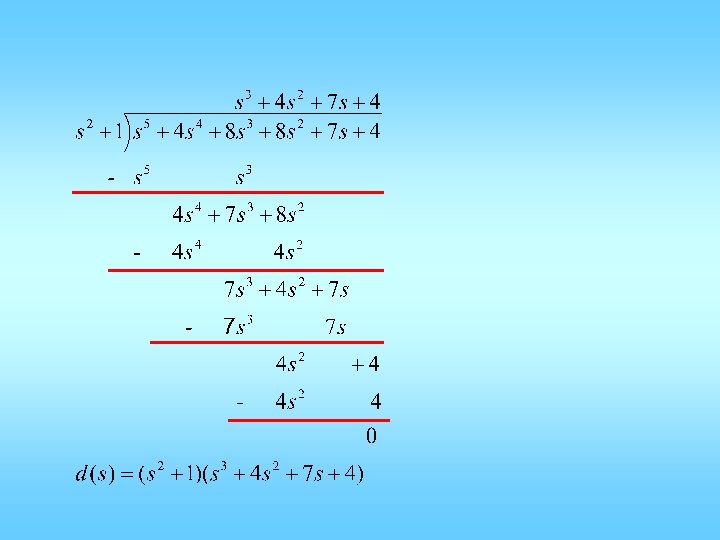
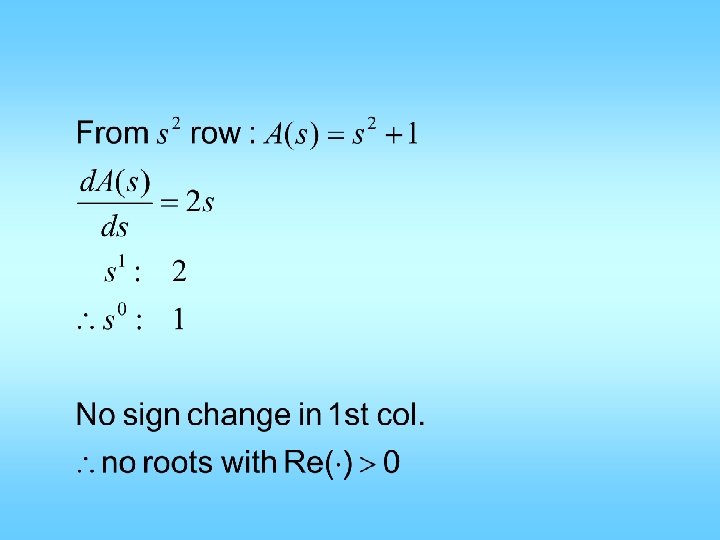
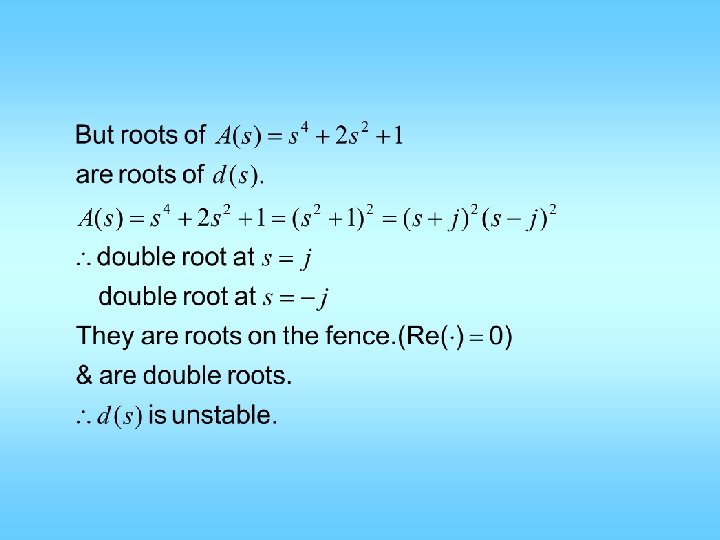
Routh Criteria Regular case: (1) A. S. 1 st col. all same sign (2)#sign changes in 1 st col. =#roots with Re(. )>0 Special case 1: one whole row=0 Solution: 1) use prev. row to form aux. eq. A(s)=0 2) get: 3) use coeff of to replace 0 -row 4) continue as usual

Example ←whole row=0

Replace by e
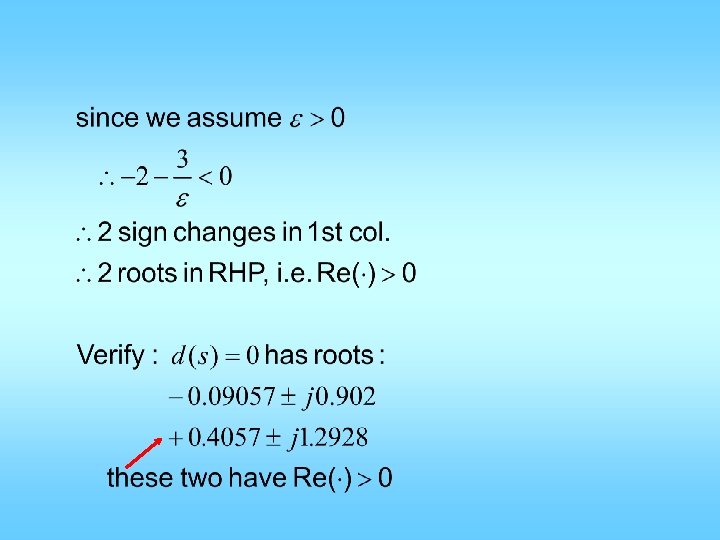
 How to use: 1) form table as usual 2)")
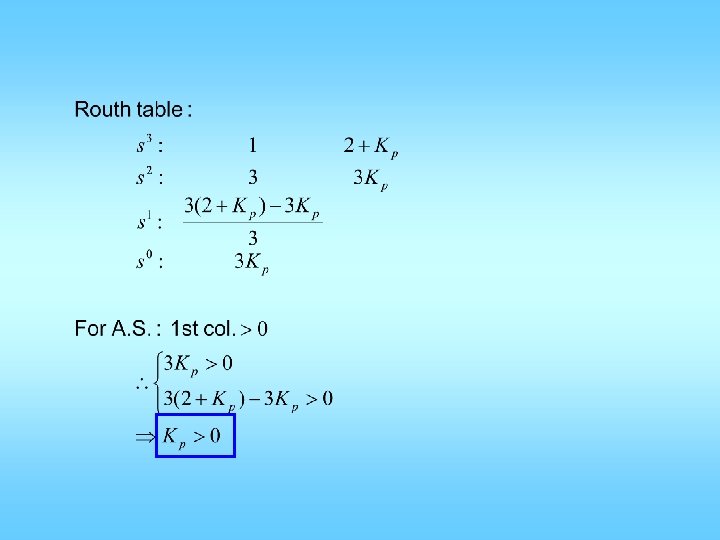
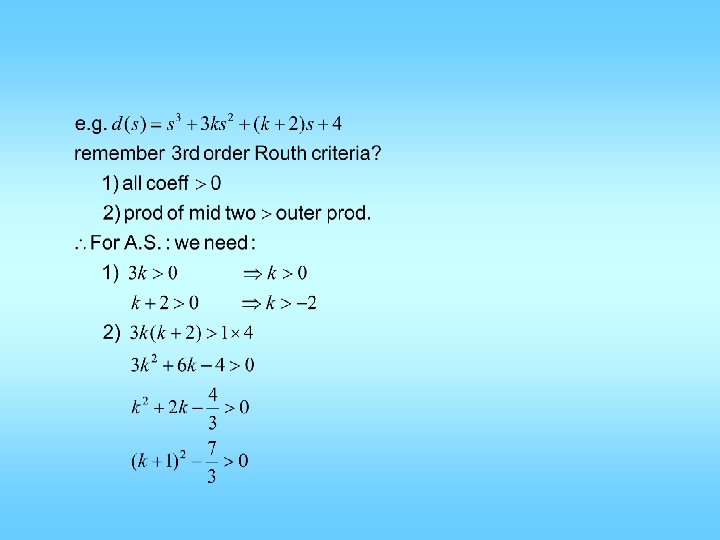
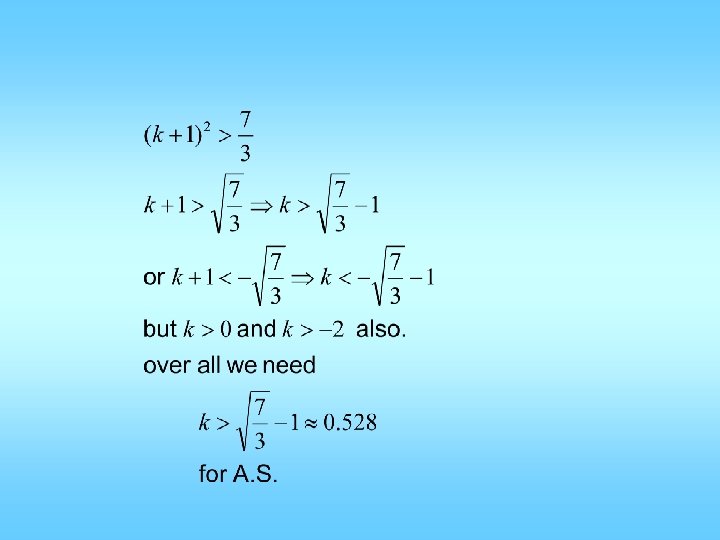
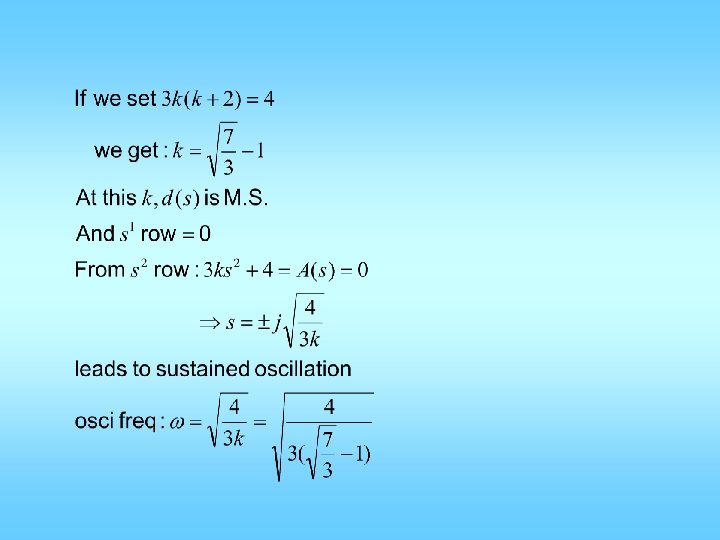
Useful case: parameter in d(s) How to use: 1) form table as usual 2) set 1 st col. >0 3) solve for parameter range for A. S. 2’) set one in 1 st col=0 3’) solve for parameter that leads to M. S. or leads to sustained oscillation
(s+1)")
Example + Kp s+3 s(s+2)(s+1)

Q: find region of stability in K-a plane. K a
- Slides: 41