The principle behind GPS is the measurement of
 between the")
� The principle behind GPS is the measurement of distance (or "range") between the receiver and the satellites. � The satellites also tell us exactly where they are in their orbits above the Earth. Four satellites are required to compute the four dimensions of X, Y, Z (position) and Time. � GPS receivers are used for navigation, positioning, time dissemination, and other research.

OPERATION OVERVIEW A GPS receiver can tell its own position by using the position data of itself, and compares that data with 3 or more GPS satellites. � To get the distance to each satellite, the GPS transmits a signal to each satellite. � The signal travels at a known speed. � The system measures the time delay between the signal transmission and signal reception of the GPS signal. � The signals carry information about the satellite’s location. � Determines the position of, and distance to, at least three satellites, to reduce error. � The receiver computes position using trilateration. �

Trilateration

� If we know our exact distance from a satellite in space, we know we are somewhere on the surface of an imaginary sphere with radius equal to the distance to the satellite radius. � If we know our exact distance from two satellites, we know that we are located somewhere on the line where the two spheres intersect. � And, if we take a third measurement, there are only two possible points where we could be located. By taking the measurement from the fourth satellite we can exactly point our location.

SIGNAL FROM ONE SATELLITE The receiver is somewhere on this sphere.

� Distance measurements from two satellites limits our location to the intersection of two spheres, which is a circle.

� A third measurement narrows our location to just two points.

� A fourth measurement determines which point is our true location

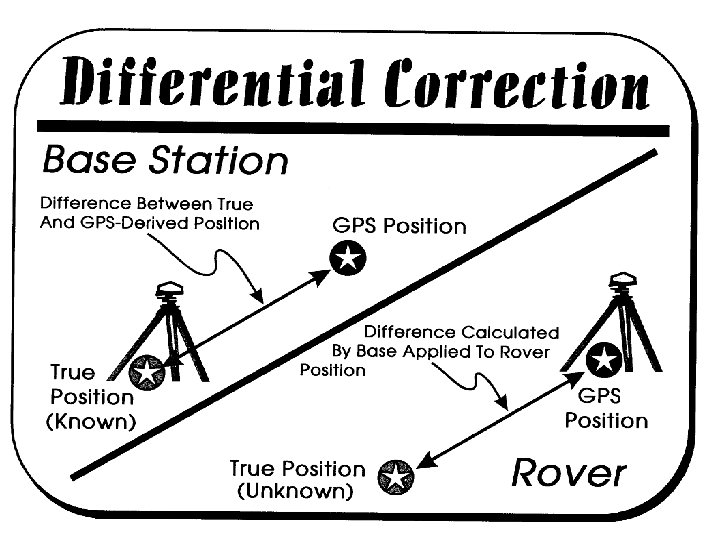
� In differential positioning, two receivers are used. One of them is placed over a known point such as a National Geodetic Survey (NGS) survey monument. This is usually referred to as the base receiver. � The second receiver, generally referred to as the “rover, ” collects data from the unknown points in the field, pretty much the same as for autonomous position data collection. It is extremely important that both the rover and base receivers collect the exact same data from the same satellites at the same time.

� The base receiver “knows” its exact location. It also receives a position from the satellites (usually with some component of error). From the difference between the known position and the GPS-derived position, a vector displacement, or differential, can be calculated, which can then be applied to the rover’s position data.
- Slides: 13