Thank You Sponsors Thank You Sponsors Problem Statement

Thank You Sponsors

Thank You Sponsors Problem Statement Identification of Critical Subsystems Identification of Vehicle States Analysis of Vehicle States Mechanical Subsystems Electrical Subsystems Mechanical Subsystem Interfaces Test Plan Update Budget Update

The RIT Baja Team has expressed an interest in improving drivetrain efficiency and dynamic control. The drivetrain has not had a significant format change since the 90’s, using a single speed reduction box coupled with a CVT. While this has been and continues to be an effective means of transmitting power to the wheels, and is the preferred solution amongst the top performing teams, the team would like to explore other options; specifically a gas-electric design. The team would like to receive a working bench top prototype of the drive system for the purpose of testing the gas electric system to compare it to the existing system.

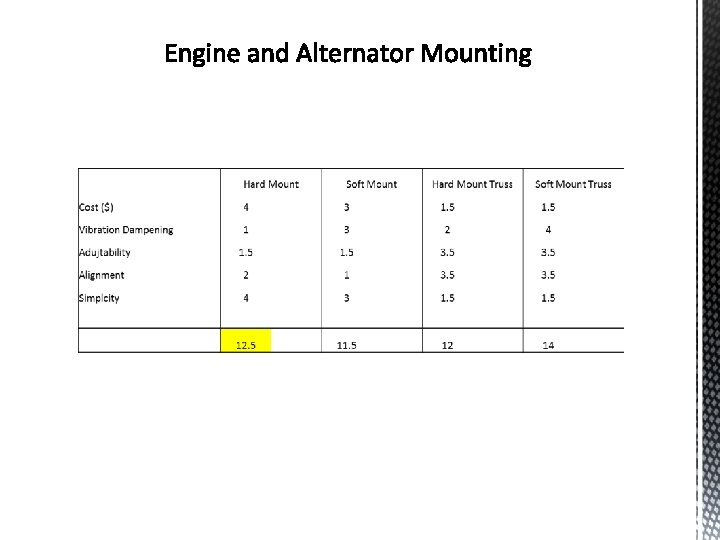
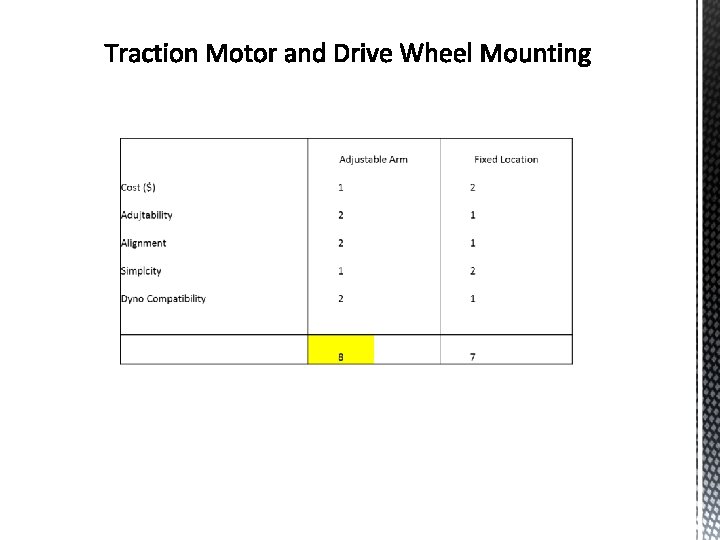
§ Engine and Alternator Mounting § CR 3, 5 § ER 5, 19 § DR 18, 19 § Wheel and Traction Motor Mounting § CR 5, 6 § ER 12, 14, 17, 19 § DR 20

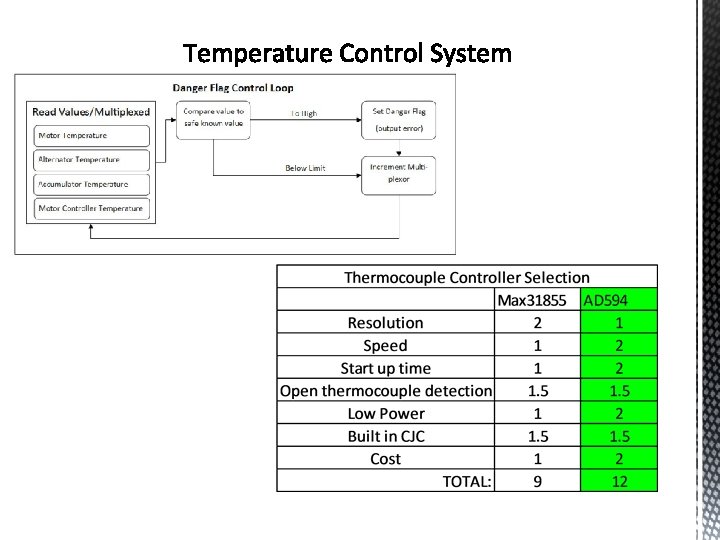
§ Controller § Engine System § Motor System § Accumulator System § Temperature § User Input

§ CR 1, 2, 4, 5 § ER 9, 10, 11, 12 § DR 16, 17

§ CR 2, 4, 6, 13 § ER 11, 12, 17 § DR 1 - 7

§ CR 10, 13, 14 § ER 5, 13, 14, 16

§ CR 15 § ER 6, 7 § DR 14, 15

§ CR 1, 2, 4, 11, 13, 16 § ER 5, 8, 9, 10, 13, 14, 21 § DR 16, 17

§ Acceleration / Sled Pull / Mud Bog / Hill Climb § Taxi § Full Throttle/Accelerating § Braking § Maneuverability / S+T / Rock Crawl § § Taxi Acceleration Braking Cornering § Endurance § § § Taxi Acceleration Braking Cornering Constant Speed

§ Vehicle at Rest § Engine Off § Engine On § Cap bank full § Cap bank not full § Vehicle in Motion § *** Cap bank full/not full applies to all § § § Accelerating/Full Throttle Coasting Braking Constant Speed Taxi

§ Mechanical § System loading at a minimum § Electrical § No electrical power flow

§ Mechanical § System loading at a minimum § Electrical § Alternator power in control closed § Power available for motor controller

§ Mechanical § System loading at a minimum § Electrical § Alternator power in control open

§ Mechanical § Maximum drive torque developed § Full tractive load § Electrical § All power is flowed to the motor controller § As voltage of system drops capacitor bank releases extra energy slowing the voltage fall

§ Mechanical § Driveline in motion, but minimum loading § Electrical

§ Mechanical § Driveline in motion, but minimum loading § Electrical § Regen power used to charge cap bank

§ Mechanical § Maximum drive torque developed § Full tractive load § Electrical

§ Mechanical § Maximum drive torque developed § Full tractive load § Electrical § Accumulator in charge state

§ Mechanical § Intermediate drive torque developed § Intermediate tractive load § Electrical § Alternator supplies all necessary power to drive motor (engine may be revved down to conserve gas)

§ Mechanical § Intermediate drive torque developed § Intermediate tractive load § Electrical § Extra power diverted to cap bank charging

Accumulator Steadily Charging Accumulator Steadily Discharging

High-side driver applied to accumulator system circuitry

Accumulator software flow diagram

Belt Chain Gear Direct Efficiency - 1 - 2 o 3 o 4 Multi-Alternator Compatible + 3 + 3 o 1 Simplicity (1) - 2 - 3 - 1 o 4 Simplicity (2) + 3. 5 + 2 o 1 Weight - 2 - 3 - 1 o 4 Step-up/down + 3 + 3 o 1 Alignment Precision Required + 3. 5 - 1 o 2 Cost ($) - 2. 5 - 1 o 4 Time to develop - 2. 5 o 2. 5 - 1 o 4 Total: 1 alternator(s) -3 16. 5 -2 19. 5 -4 11 o 23 Total: 2 alternator(s) o 21 +1 23 -1 15 0 21
 - 1 o 2. 5 Variable Position - 1.")
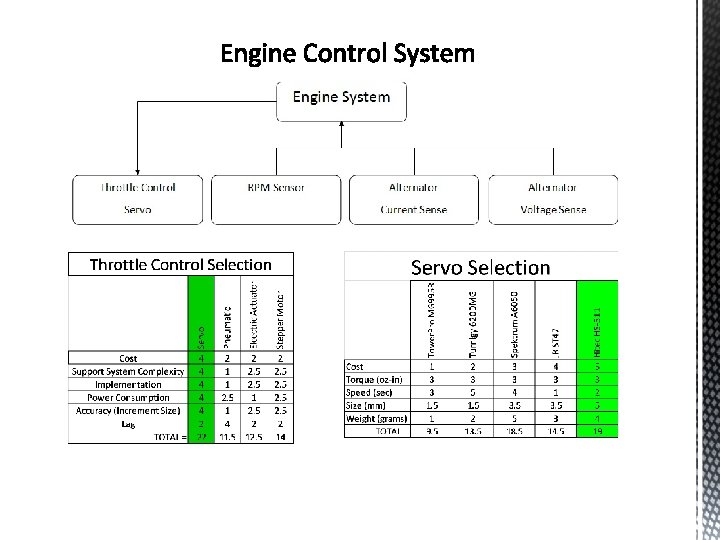
Pnuematic Servo Solenoid Cost ($) - 1 o 2. 5 Variable Position - 1. 5 o 3 - 1. 5 Weight - 1 o 2. 5 Complexity of Control + 2. 5 o 1 + 2. 5 Complexity of Linkage o 2. 5 - 1 Electrical Power Draw (neg) + 3 o 2 o 1 Resource limit - 1 o 2. 5 Actuation Speed + 2. 5 o 1 + 2. 5 Total: 1 alternator(s) -1 15 o 17 o 16

Electrical Test Plan Mechanical Test Plan § Traction motor selection § Receive torque information for RR selection § § Begin cart design Begin Sub frame design Concept motor cooling Reduction ratio range selection Select microprocessor Begin controller board layout Concept motor cooling control Continue software development Continue development of accumulator control circuitry § Test: § § § Accumulator control circuitry § Encoder inputs § Servo control and power § Update bill of materials
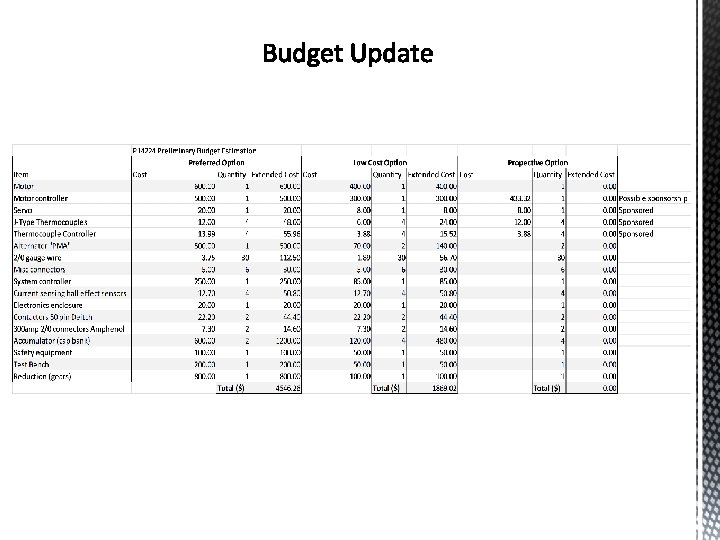

Figure Customer requirements

Figure Engineering requirements

Figure Developed requirements
- Slides: 44