TeleOperated Robotic Hand with Sensor Glove Mouhyemen A

Tele-Operated Robotic Hand with Sensor Glove Mouhyemen A. Khan Arian Yusuf Ahmed Ragheeb Nouran Mohamed Mentor: Dr. Beena Ahmed

Overview Project Background Project Progress

Project Background HISTORICAL REVIEW BENCHMARKING ANALYSIS CONCEPT GENERATION CUSTOMER NEEDS FUNCTIONAL MODELLING

Historical Review Digital Entry Data Glove Fiber Optic Glove Cyber Glove 5 DT Data Glove by Fifth Dimension Technologies Developed by Gray Grimes Developed by Visual Programming Language Inc. Developed by James Kramer Pinch Glove by Mapes 1983 1977 1987 1992 2000 - Present 1989 1997 Sayre Glove Power Glove Human Glove Developed by Thomas de Fanti & Daniel Sandin Developed by Mattel Intellivision Developed at Humanware Srl

Limitations & Challenges Cloth Support Poor Durability Need of Calibration High Cost

Problem Statement Current products are expensive

Our Aim Versatile Cheap Long Range Good functionality

Semester Tasks HISTORICAL REVIEW BENCHMARKING ANALYSIS CONCEPT GENERATION CUSTOMER NEEDS FUNCTIONAL MODELLING

Concept Generation

Concept Scoring Concepts B Weights Configurability Cost Performance Speed Security Mass + Volume Safety Range Reliability Comfort Maintenance Total 5% 10% 15% 10% 20% 5% 5% 5% 100% Rank Continue C Weighted Score 0. 25 0. 3 0. 5 0. 45 0. 75 0. 2 1 0. 15 3. 9 Score 5 3 5 2 5 3 37 1 Yes D Weighted Score 0. 15 0. 3 0. 45 0. 3 0. 2 0. 15 0. 2 2. 75 Score 3 3 5 2 3 3 1 3 4 4 31 3 No Weighted Score 0. 05 0. 45 0. 75 0. 3 0. 2 0. 15 0. 2 0. 05 3. 15 Score 1 5 5 3 1 3 4 1 28 2 No

Semester Tasks HISTORICAL REVIEW BENCHMARKING ANALYSIS CONCEPT GENERATION CUSTOMER NEEDS FUNCTIONAL MODELLING

Customer Needs
")
Customer Needs (Continued)

Semester Tasks HISTORICAL REVIEW BENCHMARKING ANALYSIS CONCEPT GENERATION CUSTOMER NEEDS FUNCTIONAL MODELLING

1. Vhand Glove 3. 0 5. 5 DT Glove 4. P 5 Glove 2. Cyber. Glove 3. Accele. Glove

Benchmarking Competitor Products Number of Sensors Sensor Data Rate DG 5 -VHand Glove 3. 0 8 Customizable Cyber. Glove II 5 DT Data Glove P 5 Glove Accele. Glove Sensor Glove(OURS) 18 7 7 6 5 + 5 Fixed Customizable Operating Temperature Devices supported in each environment 0 -50˚C 10 - 45˚C S. T. P >2 6 (maximum) 1 1 Operating system Windows 32 bit DLL Windows Only All Windows Wireless Technology Wi. Fi Bluetooth Wired Bluetooth Zigbee Battery Duration 6 hours 3 hours 8 hours Not Needed 6 -12 hours D. K. Battery Charger Internal External Internal Nil External Operating Range < 10 m 15 m 20 m 1. 22 m N. S 90 -100 m Interface Micro USB USB/Bluetooth USB USB Weight Unknown 127 grams 111 grams < 125 grams Price $585 $ 12, 295 $1495 $49. 99 $500 < $250 Haptic Feedback No No No Yes Software C ++ Own Language C

Semester Tasks HISTORICAL REVIEW BENCHMARKING ANALYSIS CONCEPT GENERATION CUSTOMER NEEDS FUNCTIONAL MODELLING

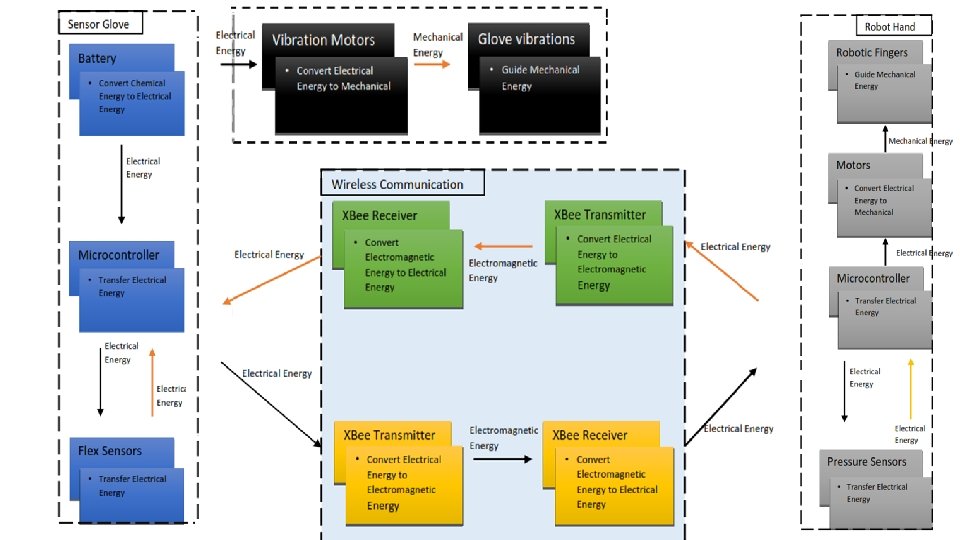
Functional Modeling of Concept

Overview Project Background Project Progress

Project Progress CIRCUIT DESIGN ROBOTIC HAND TESTING PCB DESIGN GLOVE DESIGN TIMELINE
 XBEE BOARD FLEX SENSOR VIBRATION MOTOR")
Single Sensor-glove Finger COMPONENTS ARDUINO BOARD (1 only) XBEE BOARD FLEX SENSOR VIBRATION MOTOR

Flex Sensors Circuitry
 XBEE BOARD PRESSURE SENSOR SERVO MOTOR")
Single Robotic-hand Finger COMPONENTS ARDUINO BOARD (1 only) XBEE BOARD PRESSURE SENSOR SERVO MOTOR

Robotic Hand Circuitry

Project Progress CIRCUIT DESIGN ROBOTIC HAND TESTING PCB DESIGN GLOVE DESIGN TIMELINE

PCB Design – in progress PWM VCC GND

Project Progress CIRCUIT DESIGN ROBOTIC HAND TESTING PCB DESIGN GLOVE DESIGN TIMELINE

Sensor Glove Designs Flex Sensors Vibration Motors Control Unit

Robotic Hand Designs Pressure Sensors Control Unit

Project Progress CIRCUIT DESIGN ROBOTIC HAND TESTING PCB DESIGN GLOVE DESIGN TIMELINE

Robotic Hand Testing

Project Progress CIRCUIT DESIGN ROBOTIC HAND TESTING PCB DESIGN GLOVE DESIGN TIMELINE

Timeline January February • Testing and Calibration • Complete Coding and Testing for Robotic Hand • Wireless Communication • Work on assembly of the Sensor Glove • Test Single Finger Flex Sensor Using Telecommunication with Robotic Hand • PCB Design • Robotic Hand testing March • Finish the Data Glove Construction • Wireless Communication • Robotic Hand Pinky Adjustment • Progress Report • Presentation April • Finish Testing • Final Report • Final Presentation • Poster Design • Demonstration

CONCLUSION What have we done? Where are we now? What is next?
. Destination Innovation-Episode 3: Human Exploration Telerobotics [Video")
References • Bill Moede. (2012, August 18). Destination Innovation-Episode 3: Human Exploration Telerobotics [Video file]. Retrieved from http: //www. youtube. com/watch? v=q. L 8 powplgc. I • Carnegie. Mellon. Qatar. (2011, March 20). Carnegie Mellon Qatar Building Tour [Video file]. Retrieved from http: //www. youtube. com/watch? v=84 QMXfcr. O 9 Q • Eye-Spy Aw, Snap!. (2013, June 18). Robotic ‘Wearable Exo. Skeleton Hand’ [Video file]. Retrieved from http: //www. youtube. com/watch? v=Lgb 1 x 7 P 3 Anw • Jumpei Arata [純平 荒田]. (2012, August 1). Tele-surgery robot [Video file]. Retrieved from http: //www. youtube. com/watch? v=m. ICs. Ak. Oeep 4 • Texas A&M University at Qatar. (2013, January 6). 10 Years of Engineering a World of Difference [Video file]. Retrieved from http: //www. youtube. com/watch? v=x. YBR 6 y. RZ 4 ok • Warner Bros. Pictures. (2013, September 24). Gravity – Official Main Trailer [2 K HD] [Video file]. Retrieved from http: //www. youtube. com/watch? v=Oi. Ti. KOy 59 o 4
 5 DT Data Glove 5 Ultra. (2011, 11 25). Retrieved from 5")
References (continued) 5 DT Data Glove 5 Ultra. (2011, 11 25). Retrieved from 5 DT: http: //www. 5 dt. com/products/pdataglove 5 u. html DG 5 VHand 3. 0. (n. d. ) Retrieved from vrealities: http: //www. vrealities. com/products/data-gloves/dg 5 -vhand-glove-3 -0 acceleglove user guide manual. (n. d. ). Retrieved from acceleglove: http: //www. acceleglove. com/Accele. Glove. User. Guide. pdf Cyber. Glove Systems. (n. d. ). Retrieved from Cyber. Glove Systems: http: //www. cyberglovesystems. com/sites/default/files/Cyber. Glove. II_Brochure_2009. pdf INITION. (n. d. ). Retrieved from Essential Reality P 5 Glove from Inition: http: //inition. co. uk/3 D-Technologies/essential-reality-p 5 -glove Glove sensors. (n. d. ). Retrieved from Cloud Front: http: //d 1 fohg 17 mj 6 x 9 u. cloudfront. net/Awards/categories/connected-body/glove-sensors. jpg Robot Shop. (n. d. ). Retrieved from robot shop: http: //www. robotshop. com/media/files/images/mechate-robot-hand-6 -large. jpg wave. (n. d. ). Retrieved from Bini Photo: http: //www. weebly. com/uploads/6/5/3/2/6532278/www. biniphoto. com__wave_-1. png

Acknowledgments We would like to take this opportunity to thank Dr. Beena Ahmed, for her invaluable contribution, in the development of our project; Dr. Ziyad Shafik and Mr. Wesam Mansour, for his constant help throughout the project; Dr. Haitham Abu Rub, for his cooperation and input

Questions?

Budget Sensor Glove Item Quantity Total Price Arduino Nano 10 $69. 70 6 -DOF Accelerometer & Gyroscopic Sensor 10 $59. 99 Buck-Boost Converter 10 $40. 50 Flex Sensor 4. 5” 10 $116. 50 Force Sensor – Small 10 $53. 60 Force Sensor – 0. 5” area 10 $62. 60 Force Sensor – Square 10 $71. 60 Pressure Sensor – 1” area 10 $224. 60 Vibration Motors 15 $66. 90 Analog Feedback Micro Servo 10 $136. 00 FTDI Basic Breakout - 5 V 6 $87. 00 FTDI Cable 5 V 2 $35. 9 XBee Explorer USB 5 $124. 75 XBee 2 m. W U. FL Connection 10 $233. 60 Mecha. TE Robotic Hand (right-hand) 1 $900. 00 Total Budget $2283. 24 Wireless Communication Robotic Hand

Production Costs Sensor Glove Item Quantity Total Price Arduino Nano 1 $6. 97 6 -DOF Accelerometer & Gyroscopic Sensor 1 $6. 00 Flex Sensor 4. 5” 5 $58. 25 Vibration Motors 5 $22. 30 Analog Feedback Micro Servo 5 $68. 00 FTDI Basic Breakout - 5 V 1 $14. 50 FTDI Cable 5 V 1 $17. 95 XBee Explorer USB 2 $49. 90 XBee 2 m. W U. FL Connection 2 $46. 72 1 $290. 59 Wireless Communication Total Budget

Detailed Timeline
- Slides: 42