Szenzorok s Aktorok az autiparban I Ksztette goston

Szenzorok és Aktorok az autóiparban I. Készítette: Ágoston és Ajna Készítette: Jáger Attila

Integrált és intelligens érzékelők 1. • A mikroelektronika, a mikromechanika, az integrált optika és egyéb fejlett technológiák fejlődése lehetővé tette az érzékelők miniatürizálását és a funkciók fizikailag azonos hordozón történő integrálását. Az érzékelő mátrixok azonos elemek integrációjával épülnek fel és valamilyen mérendő paraméter térbeli függésének meghatározását is lehetővé, teszik. • Az integrált érzékelők a klasszikus értelemben vett érzékelő elemen kívül a jelfeldolgozás valamilyen szintjét is magukba foglalják. Az első generációs integrált érzékelők valamilyen egyszerű jelfeldolgozást tartalmaztak, p 1. ofszet és hőfok kompenzációt és/vagy előerősítőt. • További szintet jelent a jelkonverzió (p 1: analóg digitális jelátalakítás) integrálása. A legújabb generációt az intelligens érzékelők jelentik, melyek a mikroprocesszort is magukba integrálják. Ez lehetővé teszi a környezettel való kommunikációt és intelligens funkciók beépítését.

Integrált és intelligens érzékelők 1. † Digitális jelfeldolgozás, jeltárolás † Hibakompenzáció † Multiszenzor jelfeldolgozás (neurális hálózattal öntanulás) † Önkalibráció és tesztelés † Automatikus méréshatár váltás † Átlag és hibaszámítás † Időbeli instabilitások kompenzációja (fuzzy logika alkalmazása) † Számítógéppel való kommunikáció • Az 1. táblázatban láthatók a különféle szenzorok alkalmazási területei és összehasonlításuk.

A szenzorok fogalmai és definíciói • Elektromos mennyiségként itt nem csak az áramot és a feszültséget tekintjük, hanem: Ø az áram‑/feszültség amplitúdókat Ø frekvenciát Ø periódust Ø fázist Ø elektromos rezgés impulzus tartamát Ø elektromos jellemzőket: ellenállás kapacitás induktivitás. • A szenzor a következő egyenletekkel jellemezhető: – Szenzor kimeneti jel: E =f (Φ, Y 1 , Y 2. . . ) (1) – Keresett mérési értékek: Φ =g (E, Y 1 , Y 2. . . ) (2) • Amennyiben az f vagy a g függvények ismertek, akkor olyan szenzor modell jön létre, melynek segítségével az E kimeneti jelből és az Yi zavaró értékekből a keresett mérési értékek meghatározhatók.
 általános formában a következő")
A Smart szenzor fogalma • Az „intelligens szenzorokat” (Smart szenzor) általános formában a következő módon lehet definiálni: • Az intelligens szenzorok, melyeket néha integrált szenzoroknak, speciális elektronikával ellátott szenzoroknak is neveznek, a szenzorban meglévő (statikus és dinamikus) pontosság kihasználását a (többnyire digitális) mikroelektronika eszközeivel lényegesen magasabb színvonalon teszik lehetővé, mint a hagyományos szenzorok. • Eközben információkat, a további feldolgozással az adott pontban tömöríteni lehet, vagyis, ezáltal magasabb szintre hozni (amint ez az egyszerű szenzoroknál történik) anélkül, hogy ehhez külső csatlakozások sokaságára lenne szükség.
")
A kiegyenlítési menete • A Smart szenzor programozása, ill. kalibrálása többnyire külső számítógép (Host) segítségével három lépésben történik.
 felvétele • A Host számítógép módszeresen változtatja mind az xe")
A tényleges érték (Istwert) felvétele • A Host számítógép módszeresen változtatja mind az xe mérési értéket, mind, pedig az y zavaró értéke(ke)t és eközben meghatározott számú releváns és reprezentatív üzemi pontot állít be. Ekkor a lényegesen pontosabb referenciaszenzorok révén a Host egyidejűleg megkapja az „igazi” xe és y értékeket. A két érték összehasonlításából a Host kiszámítja a szükséges korrekciós mérőszámokat és interpolálja azokat a teljes mérési tartományra. Kiegyenlítés • A szenzormodell normális esetben mindig tartalmaz néhány szabad paramétert, amelyekkel megfelelő kiegyenlítési folyamatban (4. ábra) a modell az egyedi szenzorpéldány valóságos tulajdonságaihoz illeszthető lesz. A szenzorjel mindenre kiterjedő digitális előkészítése közben ezek a modell paraméterek rendszerint programozható, nem törölhető tároló részben (PROM) kapnak helyet. A zavaró értékeknél szokásos analóg kompenzációval szemben ekkor nemcsak a lineárisan ható befolyások, hanem a kifejezetten nem lineáris folyamatok is jól helyesbíthetők. Az is nagyon előnyös körülmény, hogy a kalibrálás ilyen módjánál, ami tisztán elektromos áramkörben történik, a kalibrálási fázis alatt minden szenzor üzemi körülmények között tartható.

A korrekciós paraméterek tárolása • Az előzőleg kinyert adatokból a Host kiszámítja a példára jellemző modell paramétereket, pl. egy lineáris jelleggörbe lefutásra és ezeket eltárolja a Smart szenzor PROM jában. A hosszadalmas számítási folyamat elkerülése érdekében a Smart szenzorban jellegmezőket (Look up táblázatok) is tárolnak. Nagyon előnyös egy durvahálós jellegmező tárolása is a két pont közötti egyszerű lineáris interpolációhoz kapcsolódva

Üzemi fázis • Ezt követően a Smart szenzort lekapcsolják a Host számítógépről és a mérési értékeket digitálisan további vezérlőegységekhez lehet eljuttatni. • Példa: Smart szenzor kétdimenziós s(Tn, θm) pontokra épített jellegmezője az s elmozdulás méréséhez. • A változtatható induktivitással működő szenzor nagypontosságú kiértékeléséhez a természetes jelleggörbéjét, valamint annak hőmérséklet függőségét 5. fokú polinommal közelítik. • Az összes 36 polinom együttható és a hosszadalmas polinom kiértékelés helyett csak 32 x 64 = 2048 minta specifikus s(n, m) érték összefoglaló elnagyolt jellegmezőjét (PROM ban), valamint egyszerű interpolációs algoritmust (ROM ban) hoznak létre. • Amennyiben a T jel a Tn és Tn+1 interpolálandó értékek között jelenik meg, továbbá a θ hőmérséklet a θm és θm+1 értékek között, akkor az ábrának megfelelően a „hibamentesen” tárolt S 1. . S 4 sarokértékek között kétdimenziósan interpolálhatok és így a keresett s(T, θ) mérési érték interpolációs eredményként jön létre.

Alkalmazás gépjárművekben 1. • Az utóbbi 40 évben a mechanikusan működtetett vezérlési és szabályozási feladatokat elektronikus egységekkel (ECU, elektronikus vezérlésű egység) cserélték fel. Ebből eredően folyamatosan egyre nagyobb követelmények jelentek meg a szenzorokkal szemben. • A gépjárműipar ezekben az években, a nagy darabszámban előállított szenzorok fejlődésének korábban nem látott, példátlan motorjává vált. • Egyre gyakoribbá vált makromechanikus formákról az 1980 as évektől a trend a miniatürizálás irányába tért át, a félvezető gyártás módszereivel (Batch Processing) hasznosabbak lettek az előállított szenzorok. A hibridtechnikából származó szenzorok a vastagréteg technikában nem csekély szerepet játszottak.

Alkalmazás gépjárművekben 2. • Egyre jobban előtérbe került a szilícium alkalmazása hajtogatásos vezetéssel, mikromechanikai kivitelben, két vagy háromdimenziós struktúrában nagyon stabil egységgé összekapcsolva. Félvezető kapcsolások technológiái szinte kizárólag a szilíciumra, mint alapanyagra épültek fel, a szenzoroknál más anyagok és technológiák is figyelemreméltó szerepet töltenek be. • A kvarcot anizotrop maratási technikával szintén mikromechanikus formára lehet hozni, de nagyon előnyös piezoelektromos sajátosságai is vannak. • A III IV félvezetők, mint például a galliumarzenid (Ga. As) üzemi hőmérséklet tartománya lényegesen nagyobb, mint a szilíciumé. Vékony fémes rétegek igen alkalmasak precíz nyúlásmérő ellenállások, pontos hőmérsékletszenzorok és a mágneses tértől függő ellenállások előállítására. • Szilíciummal készült, monolitikus kivitelű szenzoroknál lehetőség van az elektronika integrálására is.

Alkalmazás gépjárművekben 2.

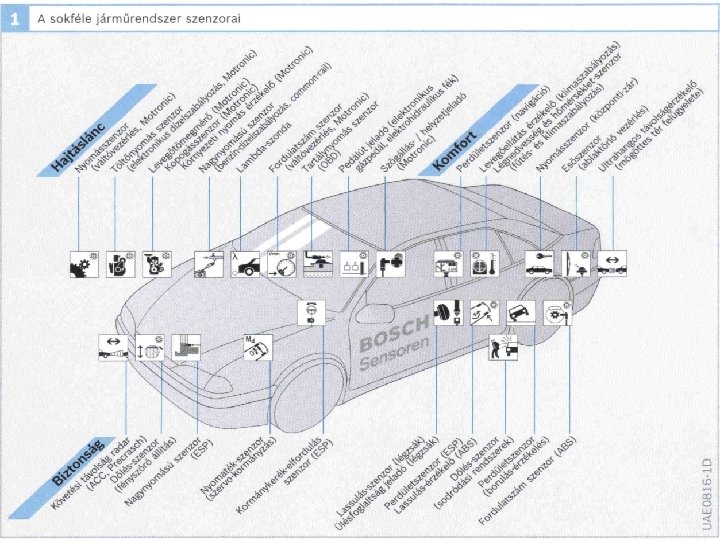
Alkalmazás gépjárművekben 3. • A kezdeti időszakban a szenzorok fejlesztése szinte kizárólag a hajtáslánc, a futómű valamint a karosszéria és a járműbiztonság járművön belüli rendszereire koncentrálódott, ugyanakkor a szenzorok új fejlesztéseinek iránya kifelé, a jármű közeli és távolabbi környezetére irányul • Ultrahang szenzorok érzékelik az akadályokat beparkolás közben és így lehetővé teszik az automatikus beparkolást is. • A közel tartományú radar érzékeli a jármű körüli tárgyakat, így időt nyerve a biztonsági rendszerek már a tényleges ütközés előtt aktiválódhatnak (Precrash szenzorok). • A képszenzorok nemcsak a forgalmi helyzetet tudják leképezni a monitorra, de képesek az útpálya kontúrvonalának felismerésére is. Infravörös sugárzók felhasználásával lehetővé teszik az éjszakai, ill. ködös időben való látást. (Night Vision). • A távoli tartományú radarszenzorok rossz látási körülmények között is képesek az útpálya figyelésére a jármű előtti 150 méteres távolságban, ezzel az automatavezetés is fontos segédeszközhöz juthat.

Kis építési méretek 1. • Egyrészt az autókba épített elektronikus rendszerek egyre növekvő száma, másrészt a járművek egyre kompaktabb formai kialakítása a belső tér utas komfortjának egyidejű megtartása mellett szélsőségesen kis méretek alkalmazását követeli meg az elektronikus eszközök szerkesztésénél. • A tüzelőanyag fogyasztás csökkentésének kényszerű igénye pedig a jármű súlyának a következetes minimalizálását is szükségessé teszi. • Az elektronikus elemek miniatürizálása érdekében a részben az áramköri technikából jól ismert technológiákat intenzíven alkalmazzák: → Réteg és hibridtechnikák (nyúlás , hő mérséklet és mágneses tér függő ellenállások); nanotechnológiák. → Félvezető technikák (Hall és hőmérséklet szenzorok). → Felületi és tömbi mikromechanika (nyomás , gyorsulás és perdület szenzorok szilíciumból.

Kis építési méretek 2. • Mikrorendszer technikák (két és több mikrotechnika kombinációja, mint például a mikroelektronikáé és a mikromechanikáé, 23. ábra).

Kis építési méretek 3. • A mikromechanikai gyártás egyrészt μm tartományú méreteket és szub μ (mikronalatti) tartományú tűréseket jelent, melyek a szokásos megmunkálási módszerekkel nem valósíthatók meg. Másrészt a szenzorok akkor is mikromechanikainak számítanak, ha a méreteik ugyan mm tartományba esnek, de mégis mikromechanikai módszerrel állítják elő azokat (24. ábra). Itt elegendő csak a legismertebb és legfontosabb módszert, a szilícium anizotrop maratását említeni. Ez ugyanis a legfontosabb, mivel a szilícium nagyobb tökéletességgel és nagyobb mennyiségben kedvező költséggel állítható elő és egyben a legtöbbet kutatott és jól ismert anyag. Mindehhez fennáll a szenzor és a kiértékelő elektronika monolitikus integrációjának a lehetősége.

Kis építési méretek 4.

Kis építési méretek 5. Az első kísérlet a szilícium háromdimenziós formájához

Kis építési méretek 3. • Ellentétben a tömbi mikromechanikával az anizotrop, gyakran ostya mélységű maratás a felületi mikromechanikánál (OMM) nem játszik szerepet. Az OMM szenzorstruktúrákat többnyire a „Si” hordozó felületén kiegészítőleg hozzák létre (28. és 29. ábrák). A tömbi Si szenzorok méretei többnyire még mm tartományúak, ezért az OMM struktúrák rendszerint egy nagyságrenddel kisebbek (tipikusan 100 μm). • Sok esetben a mechanikailag nélkülözhetetlen alkatrészeket a (hozzájuk tartozó) szenzorok ill. elektronika házaként és hűtéseként használják fel • Ez a mechatronika elnevezéssel megjelölt, a mechanikai és elektronikai komponensek „egybeolvadása” javítja az elérhető költségmegtakarítást és a tér kihasználását. • Egy további példája a mechatronikai szenzorrendszereknek a Hall bázisra felépülő, a kerékcsapágyakba integrált fordulatszám szenzor. Itt a csapágyazás elhagyhatatlan tömítő gyűrűjét, sőt a rotor, ill. a póluskerék funkcióját mágnespor betéttel lehet helyettesíteni.

Nagy pontosság • A szenzorok pontossági követelményei összehasonlítva például az ipari folyamatok érzékelőivel, kevés kivételtől eltekintve (pl. légtömegmérők), szerényebbek. • A megengedett eltérés az EW től (a mérési tartomány végső értéke) általában> 1% különösen, ha figyelembe vesszük az elkerülhetetlen öregedési folyamatokat. Ez a pontosság általában elérhető a mintaszórások gondos kiegyenlítésével, valamint a zavaró hatások ellen. Fejlesztési tendenciák 1. • Ahhoz, hogy nagy pontosságot tudjunk elérni, bizonyos mértékig segítségünkre lehet a gyártási tűrések szűkítése • kiegyenlítő és kompenzációs technika további finomítása. Jelentős előrelépést biztosít ezen a területen a szenzor és jelelektronika hibrid és monolitos integrációja a mérési pontokon, egészen az olyan komplex digitális áramkörökig, mint az analóg digitál (AD) átalakítók és a mikroszámítógépek (30. ábra).

Fejlesztési tendenciák 2.

Fejlesztési tendenciák 3. • Az ilyen „intelligens szenzorként” is megjelölt mikrorendszerek teljesen kihasználják a szenzorban rejlő pontosságot és az alábbi lehetőségeket nyújtják: † a vezérlőegység tehermentesítése, † egységes, flexibilis és busz képes csatlakozási pontok, † a szenzor többszörös hasznosítása, † olyan kisebb mérőhatások kihasználása, mint a nagyfrekvenciás mérési effektusok (helyi erősítés és demodulálás), † a szenzor eltérések helyesbítése a mérési helyen, valamint a szenzor és az elektronika közös kiegyenlítése és kompenzációja, egyszerűsítés és javítás a PROM ban tárolt egyedi korrekciós információk révén.

Fejlesztési tendenciák 4. • A zavarások egyidejű felismerésével és digitalizálásával az intelligens szenzorok képesek a keresett mérési értékeket a matematikai szenzor modell felhasználásával gyakorlatilag hibamentesre átszámítani (31. ábra). Ehhez járulnak még a példa specifikus modell paraméterek, melyeket egy megelőző, a korábbi kiegyenlítésnek megfelelő folyamatban határoztak meg és egy, a szenzorhoz integrált PROM ben tárolnak.

A Hall jeladók 1. Magnetosztatikus szenzorok • A magnetosztatikus szenzorok egyenletes mágneses terek mérésére szolgálnak. • El lentétben a mágneses induktív (tekercs) szenzorokkal, sokkal jobban miniatüri zálhatok és a mikrorendszer technika felhasználásával, kisebb költséggel állíthatók elő. Mivel az egyenletes mágnesteret a műanyagból és a nem ferromágneses fémekből készült tokozások problémamentesen átfoghatják. • A környezetével szemben jól tokozható és védhető. Alkalmazáshoz elsősorban a galvanomágneses hatások (Hall és Gauss effektus) jöhetnek szóba, valamint az anizotrop magnetorezisztív hatások is (AMR és GMR). Uh = Rh ·I·B/d

A Hall jeladók 2. Magnetosztatikus szenzorok A Hall effektust mindenekelőtt vékony félvezető lapkákkal lehet kiértékelni. UH = RH ·I·B/d RH = Hall együtthatóval, d = a lapka vastagsága, Egyidejűleg a lapka hosszirányú ellenál lása, függetlenül a mező irányától, négyze tes jelleggörbe szerint növekszik (Gauss effektus, tér lap). • A lapka mérési érzékenysége szempont jából mértékadó RH együttható szilícium esetében csak összehasonlítva kicsi. Mivel a lapka vastagsága (d) diffúziós technika alkal mazásával rendkívül vékonyra készít hető, a Hall feszültség mégis műszakilag kezelhető nagyságot fog elérni. • •
 mérése. Állandó vezérlőáram esetén „UH”")
A Hall jeladók 3. Alkalmazások 1. Mágneses fluxussűrűség (B) mérése. Állandó vezérlőáram esetén „UH” a „B” mágneses fluxussűrűséggel arányos. A kis Hall generátorok (kb. 2× 1 mm 2) térszondaként használhatók és inhomogén mágneses terek mérését teszik lehetővé. Közvetve, a mágneses téren keresztül, pl. nagy egyenáramok megmérhetők velük. 2. Az „I. B” szorzat mérése. A Hall feszültség arányos mind az „I” vezérlőárammal, mind a „B” mágneses fluxussűrűséggel. Nagysága az „I. B” szorzattól függ. A Hall generátor szorzóként működik. A mágneses fluxussűrűség arányos lehet egy „IM” árammal. Ebben az esetben a Hall generátor két áramot szoroz össze egymással. Az effajta analóg szorzókra az analóg számítástechnikában, a vezérlés és szabályozástechnikában van szükség. 3. Ha a Hall generátort állandó amplitúdójú változó mágneses térbe helyezzük, akkor a vezérlő egyenáram mellett váltakozó Hall feszültség keletkezik, ami a „B” mágneses fluxussűrűséggel arányos. A Hall generátor modulátorként vagy érintkező nélküli egyenáram váltakozó áram átalakítóként működik. 4. A „B” mágneses fluxussűrűség kis teljesítménnyel vezérelhető. A Hall generátorról nagyobb teljesítménnyel vehető le. A Hall generátornak ekkor erősítő jellege van. 5. A Hall generátor alkalmas mágneses terek kimutatására. Ha a Hall generátor közelében pl. állandómágnest mozgatunk, akkor Hall feszültség keletkezik. Ezen a módon egyszerű fordulatszámmérés valósítható meg.

A Hall jeladók 4. • A szilíci umnak alapanyagként történő használa tánál egyidejűleg jelfeldolgozó áramkört lehet a lapkára integrálni, ezáltal az ilyen szenzorok nagyon kedvező áron állíthatók elő. Figyelembe véve azonban a szilícium mérési érzékenységét és hőmérséklet függőségét, mégsem a legkedvezőbb félvezető anyag Hall szenzorok számára. Jobb tulaj donságai vannak például a III V félveze tőknek, mint amilyenek a gallium arzenid vagy az indium antimonid • A legegyszerűbb esetben a Hall feszültséget küszöbérték elektronikával integrált szenzorhoz vezetik (Schmitt Trigger), amely digitális kimeneti jelet állít elő. Amennyiben a szenzornál megjelenő B mágneses indukció alatta marad egy meghatározott küszöbértéknek, akkor a kimeneti érték „ 0” nak felel meg („elengedett” állapot); ha egy meghatározott felső határérték fölé kerül, akkor a kimeneti jel a logikai „l” nek felel meg („működő” állapot). Mivel ezek a viszonyok az üzemi hőmérséklet teljes tartományára vonatkoznak és egy típuson belül minden példányra garantálhatok, a két küszöb érték viszonylag távol esik egymástól (kb. 50 m. T). A „Hall kapcsoló” működteté séhez jelentős indukciós hatásra (∆B) van szükség.

A Hall jeladók 5. • Ilyen, még a bipolár technikával előállított szenzorokat alkalmaznak például a Hall dobozokban (12. ábra), amely a gyújtásel osztó házában a vezérmű tengelyről kapja meghajtását. • További alkalmazást találhatunk a digi tális kormányelfordulás szenzoroknál LWSl. • A Hall szenzorok ilyen típusai nagyon kedvező költséggel állíthatók elő, azonban minden esetben csak kapcsolási üzemre és analóg értékek pontatlan meghatározására használhatók.

A Hall jeladó 6. • Az egyszerű Hall szenzoroknál hátrányos a mechanikai feszültségekkel szembeni egyidejű érzékenység (piezo effektus). • A , , spinning current” elv alkalmazásával (13. ábra), összekötve a CMOS technikához vezető átmenettel, ez a hátrány megszüntethető. Amennyiben ekkor is fellép a piezo effektus, az a jelek időbeli közepelésével kompenzálható, mivel az elektródák nagyon gyors, elekt ronikus vezérlésű felcserélésével (forgatásával) különböző előjelű kimenőjelek lépnek fel. • Ha a komplex elektronikához, kapcsolódó ráfordítást meg akarjuk takarítani több Hall szenzort is (kettőt, négyet, vagy nyolcat) szorosan lehet egymás mellett elhelyezve integrálni, melyek az áramút különböző irányának felelnek meg és melyek jeleit középértékként összegzik. • A Hall IC k csak ezt követően váltak jól alkalmazhatóvá analóg szenzoroknál. Az ilyen integrált Hall IC k elsősorban kis elmozdulások mérésére alkalmasak (pl. i. Bolt erőszenzor, ez képezi le a vezető melletti utas súlyát a légzsák optimális kioldása érdekében).
")
Differenciál Hall szenzorok 1. • A kettős Hall szenzoroknál (differenciál Hall szenzor, 14. ábra) két komplett Hall rendszert helyeznek el megadott távolságra egy chipen. A hozzájuk tartozó elektronika értékeli ki a két Hall feszültség különbségét. • Az előnyük, hogy a kimeneti jel teljesen független a mágneses térerő abszolút értékétől és differenciál szenzorként csak a mágneses indukciók térbeli változását regisztrálják, tehát a tér gradienst (emiatt gyakran gradiens szondáknak is nevezik). • Többnyire fordulatszámmérésnél alkalmaznak, mivel a kimeneti jel polaritása független a rotor és a szenzor közötti légréstől.

Differenciál Hall szenzorok 2. • Egy egyszerű Hall szenzort alkalmazunk, akkor ez nem képes megkülönböztetni, hogy a mágneses fluxus a fogaskerék továbbfordulása miatt vagy a távolság megváltozása miatt (pl. rezgések, beépítési tűrések) következett be. • A kerület mentén alkalmas távolságban elhelyezett Hall szenzor jelkülönbségét értékelik ki. Ha a jelkülönbség pozitív, akkor a fogaskerék és a szenzor közötti távolságot tetszőlegesen módosítani lehet; a jelkülönbség pozitív marad, ha értékében csökken is. Az előjelet csak a rotor továbbforgatásával lehet megváltoztatni. • Maximális kimeneti jel nyerése érdekében a két Hall szenzor közötti távolságot kb. a fél inkrementális távolságnak (fél fogköznek) megfelelően választják meg.
,")
Hall szögelfordulás szenzorok kb. 180° ig terjedő tartományhoz 1. • Elfordítható mágnesgyűrűvel („Movable Magnet”), valamint rögzített lágymágne ses vezetődarabbal nagyobb szögtarto mányra is átszámítás nélküli, közvetlen lineáris kimeneti jel képezhető (15. ábra). Ebben az esetben a mágnesgyűrű bipo láris terét a félkör alakú fluxusvezető darabok között elhelyezett Hall szenzor határozza meg. • Ezt a mérési elvet a gázpedál szenzoroknál alkalmazzák.

Hall szögelfordulás szenzorok kb. 90° ig terjedő tartományhoz 2. • „Movable Magnet” alapelvén működő kivi telt mutat az ARS 1 típusú, Hall szögelfor dulás szenzor, melynek mérési tartománya kb. 90° (16. ábra). A félgyűrű formájú ál landó mágnestárcsa mágneses fluxusa egy pólussarun, két további vezetődarabon és az ugyancsak ferromágneses tengelyen át jut vissza a mágneshez. A szöghely zettől függően több vagy kevesebb a két fluxusvezetőn átvitt mennyiség, melyek mágneses vonalában Hall szenzort is el helyeztek. Mindennek révén a jelleggörbe a teljes mérési tartományban igen jó linearitású lesz

Hall szögelfordulás szenzorok kb. 180° ig terjedő tartományhoz 3. • A leegyszerűsített felépítésű ARS 2 típus lágymágneses vezető darabok nélkül ké szül (17. ábra). Itt a mágnes köríven mozog a Hall szenzor körül. Az eközben kelet kező, szinusz formájú jelleggörbe csak vi szonylag szűk szakaszon lineáris kielégítő mértékben. • Minél távolabb van a Hall szenzor a kör középpontjától, annál jobban eltér a jel leggörbe a szinuszformától. így egyrészt egy rövidebb mérési tartomány van ép pen 90° ig, másrészt egy hosszabb kellően lineáris szakasz 180° felett. • A bemutatott rendszer hátránya : – a csekély mértékű árnyékolás idegen terekkel szemben – a meg maradó függőség a mágnestér geometriai tűréseitől – és a mágneses fluxusnak az állandó mágnesben a hőmérséklet és az öregedés miatt bekövetkező intenzitás változásaitól.

Hall szögelfordulás szenzorok kb. 360° ig terjedő tartományhoz 4. • Egy 360° ig terjedő tartományú, analóg Hall szögszenzor úgy jön létre, hogy egy állandó mágnes egymásra merőlegesen elhelyezett két Hall szenzor fölött a be mutatott módon elforog. Ahhoz, hogy a mágnes elhelyezésének tűrésétől ke vésbé függjön, a mágnesnek elegendően nagynak kell lennie. A két Hall szenzort a lehető legszorosabban összeépítve kell az állandó mágnes szórt mezejének ho mogén irányú részében elhelyezni, ami egyben az állandó mágnes (φ) szöghelyzetét is reprezentálja. • A rajtuk átmenő forgó B térerővektor x és y komponensei az alábbiak szerint alakuljanak: • UH 1 = Ux ·B·sin φ • UH 2 = Uy ·B·cos φ

Hall szögelfordulás szenzorok kb. 360° ig terjedő tartományhoz 5. • Ebből a két jelértékből a „φ” szöget a φ=arctan (UH 1/UH 2) trigonometriai egyenlettel, egy hozzá tartozó, a kereskedelemben is kapható kiértékelő chippel lehet kiszámítani, egyúttal a szenzorjel digitalizálása is többnyire megtörténik. Ilyen Hall szenzor elrendezést VHD val (Vertical Hall Devices) elvileg a bemutatott módon függőlegesen is integrálni lehet, ekkor a szenzor chip síkja merőlegesen helyezkedik el a forgástengelyhez viszonyítva és a szenzor, ellentétben a normál, planár Hall szenzorokkal inplane (síkbeli) érzékenységet mutat. • A Sentron cég (Melexis, Svájc) ilyen szenzorokon dolgozik és a közeljövőben azokat piacra is hozza.

Hall szögelfordulás szenzorok kb. 360° ig terjedő tartományhoz 6. • • • Az ilyen rendszerű szögelfordulás szenzorok szóba kerültek az indítómotor nélküli, azonnali indítórendszerek megvalósításánál, ahol a vezérmű tengely abszolút elfordulási helyzetét a 360° feletti tartományban kell tudni mérni. Létezik még egy trükk, amellyel egy normál kivitelű, planár Hall szenzornak (kiegészítőleg) in pláne (síkbeli) érzékenységet lehet kölcsönözni. A chip készre alakítása után a felületére lágymágneses anyagból készült, kb. 200 μm átmé rőjű kör alakú lapocskát visznek fel. a lapocska fluxus koncentrátorként hat (IMC, Integrated Magnetic Concentrator)

Hall szögelfordulás szenzorok kb. 360° ig terjedő tartományhoz 7. • Minthogy az átlósan egymással szemben fekvő elemek mindig ellenirányú mezőirányt „látnak”, a mezőkomponens meghatározásához mindig a két ellenirányú, azonos nagyságú Hall feszültséget értékelik ki. • Az átlósan szemben fekvő elemek összegezett jelének járulékos kiértékelésével a vertikális mezőkomponensek (Bz) is meghatározhatók; mivel ezekre a ferromágneses lapocskának semmilyen hatása nincs. Tehát a szenzor beépítési helyén ható indukciós vektor B ilyen elrendezésével mind a három komponens meghatározható. • A jel kiértékeléshez szükséges elektronikus áramköri eszközt, az arctan függvény kiszámítására szolgáló p. C alapú digitális jelprocesszort (DSP) és a szenzor End of Line kiegyenlítéséhez szükséges eszközt (EEPROM), csekély költséggel lehet a szenzorral közös chip re integrálni.

Hall szögelfordulás szenzorok kb. 360° ig terjedő tartományhoz 8. • A 360° ig terjedő szögek méréséhez elegendő, a szenzorchip felett integrált jel ki értékeléssel egy, a chip pel párhuzamosan mágnesezett, célszerűen kerek formájú állandó mágnest elforgatni (21. ábra). Minthogy az elfordulási szög az arctanfüggvény segítségével a két szinuszos és koszinuszos szenzorjelből jön létre, a mágneses tér erőssége, tehát a mágnesek öregedése, hőmérséklet függősége és a szenzorfelülettől mért távolsága ekkor semmilyen szerepet nem játszik. • A szenzor maximális belső eltérését a gyártó 360° os mérési tartománynál +2° ban adja meg. Ezt azonban a szenzor felhasználó általi kalibrálásánál még jelentősen javítani lehet. • A jelprocesszor feldolgozási ideje alapján, 20 MHz es ütemfrekvenciánál a legrövidebb mintavételi idő 200 ps. Pulzusszélesség modulált jelkimenetnél maximálisan 1 k. Hz el lehet működtetni. Az indításhoz a szenzornak 15 ms ra van szüksége. A mérési térerősség tipikus értéke kb. 40 m. T. A koncentrátor lapocska 0, 7 T feletti fluxus sűrűségnél már telített lesz.

Hall szögelfordulás szenzorok kb. 360° ig terjedő tartományhoz 9. • 360° nál kisebb szögelfordulásokat a legegyszerűbb Hall IC kel is („Hall kap csoló”), mint amilyeneket a fordulatszámméréshez is alkalmaznak, meg lehet határozni (alkalmazás az LWS 1 típusú kormányelfordulás szenzorokban). Ehhez n számú bit feloldásához n számú Hall kapcsolót kell egy kör mentén azonos távolságban elhelyezni (22. ábra). • Kormánykerék szögelfordulás szenzor kialakításához a kódtárcsát például a kor mánytengelyhez, a szenzor többi részét pedig a kocsiszekrényhez lehet rögzíteni. • A kódoló tárcsát a szűk légrés tűrések miatt a felső és az alsó tárcsa között súrlódással vezetik meg. • Többszörös körbefordulásnál kiegészítő, egyszerű 3 bites elrendezés alkalmazható, melynek kódtárcsája áttételen keresztül kapcsolódik a kormánytengelyhez. Az ilyen elrendezés felbontása többnyire nem jobb 2, 5° nál.

Kormánykerék szögelfordulás szenzor Lágymágneses kódtárcsa zárja vagy nyitja az egymással szembeni állandó mágnesek közötti teret, így a Hall kapcsolók a tár csa tovább fordulásánál egymást követő n-számú, különböző kódszavakat hoznak létre (sorozat kódok). Nagyobb kijelzésű hibák elkerülésére köztes állapotokban célszerű Gray kódot alkalmazni. A Gray kódot úgy alakították ki, hogy a két egymás melletti pozícióhoz tartozó kódszavak ellentétben például a duál kódokkal csak 1 bitben különböznek egymástól, így egy nyilvánvalóan hibás jelzés az egyik helyzetből a következőbe történő átmenetnél többé már szöglépésként nem jelenhet meg.
 irányú Hall effektus mellett a félvezetőlapkákon longitudinális")
Térlemez szenzorok • A transzverzális (kereszt ) irányú Hall effektus mellett a félvezetőlapkákon longitudinális (hosszirányú) ellenállás effektus is megjelenik, melyet Gauss effektusnak is neveznek. Azon eszközöket pedig amelyek ezt használják „Feldplatten” nek (térlemez) is nevezik amelyet kristályos indium antimonidból (In. Sb) állítják elő. • A Hall szenzorokkal ellentétben a „térlemezeknél” az optimális lapkaforma inkább rövid és benyomódó, tehát nagyon csekély az elektromos ellenállása. Ahhoz, hogy a technikailag hasznosítható értékeket „kΩ” tartományban kapjuk meg, sok ilyen lapkát kell egymás után kapcsolni. Ez a feladat elegánsan oldható meg mikroszkopikus méretű, jó vezetőképességű nikkelantimonid tűk behelyezésével a félvezetőkristályokba, keresztben az áram irányára elhelyezve, valamint a félvezető ellenállás kanyargós elhelyezésével (23. és 24. ábrák). • Az ellenállás függése a B mágneses indukciótól kb. 0, 3 T indukciós értékig négyzetes, azt követően egyre inkább lineáris.

Térlemez szenzorok • A kivezérlési tartomány felfelé korlátlan; az időbeli viszonyokat műszaki alkalmazásoknál mint pl. a Hall szenzornál gyakorlatilag tehetetlenség nélkülinek lehet tekinteni. • Mivel a térlemezek ellenállás értéke erősen hőmérséklet függő (kb. 50% os csökkenés 100 K fok felett), többnyire csak kettős elrendezésben, feszültségosztó kapcsolásban (differenciál térlemez) alkalmazzák. A két osztó ellenállást az adott alkalmazásnál mágnesesen, lehetőleg ellenkező irányban kell vezérelni. A feszültségosztó kapcsolás az egyes ellenállások nagy hőmérséklet függése ellenére a szimmetriapont (munkapont) igen jó stabilitását biztosítja, amennyiben a feszültségosztó ellenállások azonos értékűek. • Ahhoz, hogy a mérési érzékenység kellően jó legyen, a térlemezeket célszerűen 0, 1. . . 0, 3 T közötti mágneses munkaponton működtetik. A szükséges mágneses előfeszítést rendszerint egy kis állandó mágnessel biztosítják. • A térlemezek előnye: – az igen magas jelszint amely a volt tartományba esik és ezzel a közvetlen illesztő elektronikát, valamint a hozzá tartozó védő intézkedéseket megtakaríthatjuk. – Nagyon érzéketlenek az elektromágneses zavarokkal szemben – nagy előfeszítő térnek köszönhetően szinte teljesen érzéketlenek idegen mágneses terekkel szemben.
 1. • A vékony, csak 30. . . 50 nm")
Anizotrop magnetorezisztív szenzorok (AMR) 1. • A vékony, csak 30. . . 50 nm vastagságú Ni. Fe ötvözetrétegek elektromágneses anizotrop tulajdonságot mutatnak. Ez azt jelenti, hogy elektromos ellenállásuk mágneses tér hatása alatt megváltozik. Az ilyen típusú ellenállás struktúrákat emiatt angolul anisotropic magneto resistive (rövidítve: AMR), AMR elemeknek ill. AMR szenzoroknak nevezik. Az általában alkalmazott fémötvözet Permalloy néven is ismert. (Vas nikkel ötvözetű, jól mágnesezhető nagy permeabilitású mágneses lemezanyag) Hosszú ellenállás szalagnál, amint azt a 25 a. ábra mutatja, külső vezérlőtér nélkül egy kis, spontán mágnesezés MS áll fenn a vezetőpálya hosszirányában (alakfüggő anizotrópia). • az AMR szenzorokat gyakran gyenge Bias mágnesekkel látják el. A hosszirányú ellenállás a legnagyobb értéket éri el R||. Amikor a mágnesezés vektora külső tér (Hy) hatására ϑ szöggel elfordul, a hosszirányú ellenállás fokozatosan lecsökken egészen addig, míg d=0 nál a minimumát (R ) el nem éri. Eközben az ellenállás értéke csak a szögtől függ, amit a létrejött mágnesezettség (Ms) és az I áram határoz meg.
 2.")
Anizotrop magnetorezisztív szenzorok (AMR) 2.
 3. • Itt a (β együttható a maximálisan lehetséges ellenállási")
Anizotrop magnetorezisztív szenzorok (AMR) 3. • Itt a (β együttható a maximálisan lehetséges ellenállási változatot jelenti. Ha a külső tér sokkal nagyobb a spontán mágnesezettségnél (vezérlő állandó mágneseknél rend szerint ez a helyzet), akkor gyakorlatilag kizárólag a külső tér iránya határozza meg a szöget. A térerősség nagysága többé nem játszik szerepet, azaz a szenzor „telítetten” működik. • Kiváló vezetőképességű, rövidrezáró szalagok (például aranyból) az AMR réteg felett külső tér nélkül is 45° kal eltérően vezetik az áramot a spontán mágnesezéshez (hosszirányhoz) viszonyítva. • Emiatt a „trükk miatt” melyet „csipkés pólusú” szenzornak is neveznek a szenzor jelleggörbéje 45° kal eltolódik az egyszerű ellenálláshoz viszonyítva. így elérhető, hogy a külső térerő Hy = 0 pontjában jön létre a legnagyobb mérési érzékenység (fordulópont). A két ellenálláson alkalmazott ellenirányú szalagbevonat oly módon hat, hogy az azonos terek hatása alatt az ellenállásuk ellentétesen változik, vagyis mialatt az egyik nagyobb lesz, addig a másik lecsökken. • Az AMR szenzorok vékonyréteg szenzorként történő használata azzal az előnnyel is szolgál, hogy például lézertrimmeléssel a megkívánt (Soll) értékre (pl. nullpontra) egyenlíthetők ki. Hordozó anyagul oxidált szilíciumtárcsák szolgálnak, melyekbe elvileg a jelfeldolgozó elektronika is integrálható.
 4. • Az egyszerű, kétpólusú AMR elemek mellett léteznek Pseudo")
Anizotrop magnetorezisztív szenzorok (AMR) 4. • Az egyszerű, kétpólusú AMR elemek mellett léteznek Pseudo Hall szenzorok is, közel négyzetes Ni. Fe vékonyrétegstruktúrákban, melyek hasonlóan a normál Hall szenzorokhoz négy csatlakozással rendelkeznek. Kettő az áramvezetés céljára, kettő pedig a (Pseudo) Hall feszültség céljára szolgál (26. ábra). A normál Hall szenzorokkal ellentétben a Pseudo Hall szenzorok a mágneses térre a réteg síkjában és nem arra merőlegesen érzékenyek. A jelleggörbe sem lineáris, hanem szinusz formájú, kifejezetten pontos szinuszos függéssel, ami semmilyen módon nem függ a vezérlő tér erősségétől és a hőmérséklettől. A mezővel párhuzamos áramvezetésnél a kimeneti feszültség eltűnik, míg ϑ = 90° ig terjedő szögelfordulásnál egy fél szinuszos periódust ír le. A nyert szinuszos feszültség amplitúdója tehát: • UH=UH·sin 2φ
 5. • Ha a külső vezérlőtér egyszer már elfordult φ")
Anizotrop magnetorezisztív szenzorok (AMR) 5. • Ha a külső vezérlőtér egyszer már elfordult φ = 360° ra, akkor a kimeneti feszültség két teljes szinusz periódusként jelenik meg. Az UH amplitúdó azonban nagyon határozottan függ: – a hőmérséklettől – a szenzor és a vezérlő mágnes közötti légrés nagyságától – a hőmérséklet és a légrés növekedésével csökken • A Pseudo Hall elemek mérési érzékenysége még számottevően növelhető (anélkül, hogy a szinusz formától nagyon eltérnénk), ha az eredetileg teljes felületű elemeket „belülről” kihoznánk, vagyis csak a „váz” maradna állva (26 b. ábra). Ezzel a változtatással a Pseudo Hall szenzor geometriai formájában is átalakulna négy AMR ellenállásból álló teljes híddá (26 c. ábra). Maga a hídellenállások kiegészítő hajtogatása (kanyargós vonallá hajlítása) nem torzítja el a jel szinusz formáját olyan nagyon, ha a hajtogatás egy bizonyos pályaszélességet nem lép túl.

Egyszerű AMR szögszenzorok < 30° tartományra • A „csipkés pólusú” változatban készí tett magnetorezisztív elfordulás szenzorokat nagyon behatárolt pontossággal és korlátozott mérési tartománnyal (max. ± 15°) alkalmazzák, összhangban egy magnetorezisztív feszültségosztóval (differenciál szen zor), hosszúkás (nyilvánvalóan hajtogatottra is alakított) Permalloy ellenállásokból, kiváló vezetőképessé gű, aranyból készült keresztsávokkal (27. ábra). • Az ilyen szenzoroknál a nullpont gyakorlatilag teljesen független a mágnes és a szenzor egymás közötti távolságától, de nem független a jelleggörbe emelkedése, amely ugyancsak függ a hőmérséklettől (TK közel 3· 10 3/K). Az ilyen szenzorok kedvezőbb költségű alternatívaként jöhetnek szóba a pedálhelyzet mérésénél.

Egyszerű AMR szögszenzorok mm es tartományra • A legegyszerűbb útszenzorokat egyen kénti differenciál csipkéspólusokkal tipikusan néhány mm es mérési tartományra lehet felépíteni (28. ábra). • Kellő pontosság elérése érdekében állandó távolságot (légrést) kell tartani a szenzor és az elmozduló mágnes között, ami a mérendő s helyzetet testesíti meg. • A jelleggörbe emelkedésének hőmérséklet függése egy ugyanarra a hordozóra felvitt, kiegészítő fémes vékonyréteg szenzorral nagyon könnyen és jól kompenzálható, ami közel ugyanazt a TK t mutatja, de ellenkező előjellel (pl. Pt, Ti, Ni).

Szögelfordulás szenzor 180° ra • A magnetorezisztív szögszenzorok Pseudo Hall verzióban a jel nagyon pontos szinuszformáját használják fel, ami négypólusú, teljes felületű szenzorstruktúra ki meneti kapcsain vehető le. Az elektromos kimeneti jel két teljes periódusa a mágnes egy mechanikai körülfordulásának (360°) felel meg. • Egy második, 45° kal elfordított elemmel koszinusz jelet hoznak létre (30. ábra). A két jelfeszültség viszonyából (pl. az arctan függvény használatával) nagyobb pontossággal lehet, messzemenően függetlenül a mágneses tér hőmérséklet változásától és intenzitás ingadozásaitól, meghatározni a mérési szöget (pl. mikrokontrollerrel vagy ASIC kal). • a két hidat egymás fölött helyezik el. Ez olyan kialakításnál jöhet létre, amikor a két, 45° ra elhelyezett hidat egymásba „szövik”, és így a hidak egy ponton kvázi egymás fölött lévőknek tekinthetők (29. ábra).

Szögelfordulás szenzor 360° ra 1. • • Az AMR szögszenzorok súlyos hátrányaként jelennek meg azok a természetes kor látok, melyek a 0°. . . 180° szögtartományra vonatkoznak. Ez a korlátozás azonban a mágneses tér irányának alternáló segédmező által létrehozott mágneses térirány modulálásával leküzdhető (31. ábra). Ekkor, ellentétben a 180° hoz tartozó periodikus cos és sin szenzorjelekkel, ezek a modulációs jelek 360° os periodicitásúak lesznek, és így sikerülhet, pusztán a modulációs jel előjelének kiértékelésével, a tartománykülönbséget és ezzel a mérési tartományt kiterjeszteni, azáltal, hogy a segédmező a két szenzorhídnál különböző irányokba mutat, a két modulációs jel fázisban egymástól eltolt lesz. A tartományok megkülönböztetéséhez elegendő az értékében erősebb modulációs jel előjelének a meghatározása. Ezzel a tartomány megkülönböztetése nem jelent problémát és ez erősen zavart modulációs jelnél is jól megoldható.

Szögelfordulás szenzor 360° ra 2. • A mágneses segédmezőt egy, az AMR szenzorchipre integrált planár tekerccsel hozzák létre (32. ábra). • A vezeték irányításának megfelelően a segédmező a „cos” és „sin” teljes hídnál 45° ra eltérő irányokba mutat. • A szenzort csak a forgástengely végéhez lehet beépíteni. Ez megoldható például a kormányoszlop végénél a kormánykerék elfordítási szögének méréséhez olyan rendszereknél, melyek a kormányoszlop többszörös körülfordulásának meghatározása nélkül működnek (pl. kormányszög szenzor LWS 4).
 • Egy elforgatható rész többszöri átfordítása, mint")
Szögelfordulás szenzor 360° feletti tartományra (többszörös átfordulások) • Egy elforgatható rész többszöri átfordítása, mint például a kormánytengelyé, kettős elrendezésű „Pseudo Hall elfordulási szög szenzorral (külön 180°)” mérhető. A két hozzátartozó állandó mágnest nagy áttételű fogaskerék hajtómű forgatja (33. ábra). • Mivel a két meghajtott kis fogaskerék, melyekre az állandó mágnesek vannak rögzítve, eggyel eltérő fogszámúak (fogszám: m és m+1), kölcsönös fázishelyzetük (az elfordulási szögek különbsége: Ψ θ) egyértelmű érték a kormánytengely (φ abszolút szöghelyzetéhez viszonyítva. • A rendszert úgy alakítják ki, hogy ez a fáziskülönbség a kormányoszlop teljes négy körülfordulása során ne lépje túl a 360° ot és így a mérés egyértelműsége végig sértetlen marad. • Ilyen elrendezéssel a teljes kormányszög tar tományt l° nál jobb pontossággal lehet felbontani (ennek az elvnek alkalmazásával az LWS 33 kormányszög szenzornál találkozhatunk).
 • A GMR szenzortechnológiát csak néhány évvel ezelőtt fejlesztették ki")
Giant magnetorezisztív szenzorok (GMR) • A GMR szenzortechnológiát csak néhány évvel ezelőtt fejlesztették ki és első alkalmazási területeik a gépjárművek szög és fordulatszám szenzorjainál találhatók. • A GMR szenzorok fontos előnye az AMR szenzorokkal szemben: – szögelfordulás mérésénél a természetes 360° os egyértelműségi tartomány – nagyobb mágneses tér érzékenység fordulatszám méréseknél – a GMR szenzorok nemcsak mágneses funkciós rétegből épülnek fel, hanem komplett rétegrendszerből. • Alapvetően két rendszert különböztethetünk meg: – Egyik a GMR multiréteg, amely tipikusan 20 különálló, felváltva elhelyezett lágymágneses és nem mágneses egyedi rétegből tevődik össze – A másik a GMR spinmodul, amely anti ferromágneses, ferromágneses és nem mágneses funkciós rétegekből tevődik össze. • Az egyes elemi rétegek vastagsága minkét változatnál 1. . . 5 nm nagyságú, tehát mindössze néhány atomhelynyi vastagságú rétegből áll.
 a GMR multirétegeknél 20. .")
GMR multirétegek • A relatív ellenállás változás (GMR effektus) a GMR multirétegeknél 20. . . 30% os nagyságú és ezzel 10 szer jobb, mint az AMR effektusé. Ahhoz, hogy a munkapont a jelleggörbe tartomány egy érzékeny részére kerüljön, a GMR multiréteg oszlopot keménymágneses réteggel egészítik ki, ami megfelelő Bias teret hoz létre. Az ilyen szenzorstruktúra érzékenysége kb. 0, 8 m. T nál van és ezzel jobb az AMR csipkés pólus struktúráknál. GMR spinmodulok 1. • Eltérően a GMR multirétegektől a GMR spinmodulok (35. ábra) szögelfordulás érzékelésre is alkalmasak. Ezeknél a szenzoroknál a szögelfordulás érzékeléséhez szükséges referencia mágnesezés azáltal jön létre. hogy a ferromágneses rétegek egyikének (FM 1) és a szomszédos antiferromágneses réteg kölcsönhatásával (AFM) rögzítik (összecsapolják). Emiatt ezt az eljárást „Pinned Layer” nek is hívják. Ezzel szemben a mágnesezés egy nem mágneses köztes rétegen, mágnesesen csatolt második ferromágneses réteg felett (FM 2), egy külső mágneses térrel szabadon elfordítható. Ennek megfelelően ezt a réteget „Free Layer” nek nevezik. Az ellenállás koszinusz függvény szerint változik a külső tér iránya és a referenciairány közötti Θ szögtől függően.

GMR spinmodulok 2. • A szögmérés pontossága szempontjából alapvetően fontos a referencia mágnesezés stabilitása a külső mágneses tér hatásaival szemben. Ezt a stabilitást kiegészítő mesterséges antiferromágnesek (SAF) alkalmazásával jelentősen növelni lehet. • Ennél a megoldásnál két ferromágneses réteget alkalmaznak, melyek egy igen vékony, nem mágneses köztes rétegen át antiferromágnesesen nagyon erősen kötődnek egymáshoz. • a külső tér számára nem nyújtanak behatolási felületet. A két réteg egyikének mágnesezése a szomszédos természetes antiferromágnesekkel (AFM) jön létre.

GMR spinmodulok 3. • A GMR szögszenzor, hasonlóan az AMR szögszenzorokhoz, két teljes hídból áll, melyek közül az egyik a térirány koszinuszos, a másik a szinuszos függvénykapcsolatát állítja elő (37. ábra). • Az ehhez szükséges különböző mágneses referenciairányokat MR az egyes hídellenállások helyi felmelegítésével és lehűtésével, egyidejűleg ráhelyezett, megfelelő irányítottságú mágneses térrel hozzák létre. • A két híd jelének arctan összekapcsolásával lehet a teljes 0°. . . 360° tartományban a tér irányát egyértelműen meghatározni.

Hall fázisszenzorok Alkalmazás • A vezérműtengely a forgattyús tengelyhez viszonyítva 1: 2 áttételű lassítással forog. • A vezérműtengely forgási helyzete mutatja meg, hogy a dugattyú sűrítési vagy kipufogási ütemben halad a felső holtpont felé. A vezérműtengelyen elhelyezett fázisszen zor (fázis jeladónak is nevezik) továbbítja ezt az információt a vezérlőegységhez. Erre az információra szükség van például egyszikrás egyedi gyújtótekercsekkel működő gyújtókészülékeknél és a szekvenciális befecskendezésnél is.
")
Szerkezet és működés 1. Hall rúdszenzorok • • • A Hall rúdszenzorok (la. ábra) a Hall effektus alapján működnek: a vezérműtengellyel együtt forog egy ferromágneses anyagból készült rotor (7. tétel, fogakkal, illetve szegmensekkel vagy furatos blendével ellátott impulzuskerék). A Hall IC t (6) a rotor és egy állandó mágnes (5) között helyezik el, amelyik a Hall elemre merőleges mágnesteret hoz létre. Amikor egy fog (Z) éri el a rúdszenzor (félvezető lapkáján) átfolyó áramot, ez elemre merőleges irányúra változtatja a mágneses térerejét. Ezáltal feszültségjel jön létre (Hall feszültség), amely független a szenzor és az impulzuskerék közötti relatív sebességtől. A szenzor Hall IC ben integrált kiértékelő elektronika feldolgozza a jelet és négyszögjelet továbbít (lb. ábra)
- Slides: 61