Stingray Underwater Vehicle Navigation Techniques Chris Barngrover CSE

Stingray Underwater Vehicle Navigation Techniques Chris Barngrover CSE 237 D

Unmanned Vehicle Navigation Most funding goes to UAVs followed by UGVs Lots of UUV applications (e. g. Moorea) GPS is easiest way to know location, but this fails underwater Need to use other techniques
 Doppler Velocity Log (DVL) Acoustic Techniques")
Navigation Techniques Dead Reckoning Inertial Navigation System (INS) Doppler Velocity Log (DVL) Acoustic Techniques ◦ Long Baseline (LBL) ◦ Ultra-short Baseline (USBL) Geophysical (a priori maps) Computer Vision

Stingray Microstrain 3 DM-GX 1 INS SSI Technologies Pressure Sensor 2 Remote Ocean System CE-X-18 Underwater Cameras Open. CV Library

Quarter Goals Convert pressure sensor data to depth Develop module that subscribes to INS, depth, and vision data Develop a Kalman filter to create position estimation Use vision techniques to rectify position estimation

Midway Accomplishments Incorporated Planner Module Developed LPS Module Researched pressure to depth conversion Researched Kalman filter techniques

Further Accomplishments Depth Conversion Function Basic Kalman Filter ◦ Ground up development – Stalled ◦ Open. CV Libraray - Success
 PSI")
Depth Conversion SSI Technologies Pressure Sensor Take depth measurements at Depth PSI (avg) PSI (mode) STDEV <0 0. 487980531 0. 4878 0. 002353867 0 0. 504468293 0. 5082 0. 00547204 6 0. 5609 0. 5592 0. 008404093 12 0. 626790909 0. 6305 0. 005927089 18 0. 680715385 0. 6815 0. 009534933 24 0. 734753846 0. 7324 0. 007245701 36 0. 844180769 0. 8446 0. 008845203 30 0. 786181818 0. 7834 0. 006437068 36 0. 831566667 0. 8344 0. 005860034 46 0. 945572727 0. 9465 0. 004676756 52 0. 978253659 0. 977 0. 00565677 <0 0. 488291566 0. 4878 0. 003332674
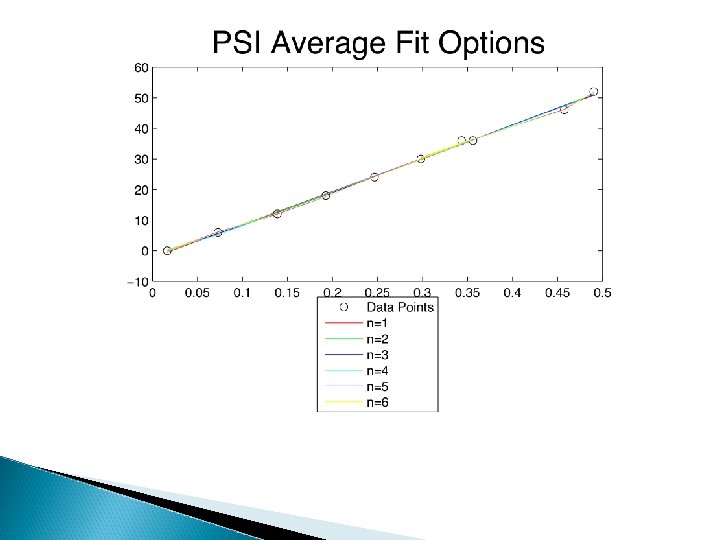
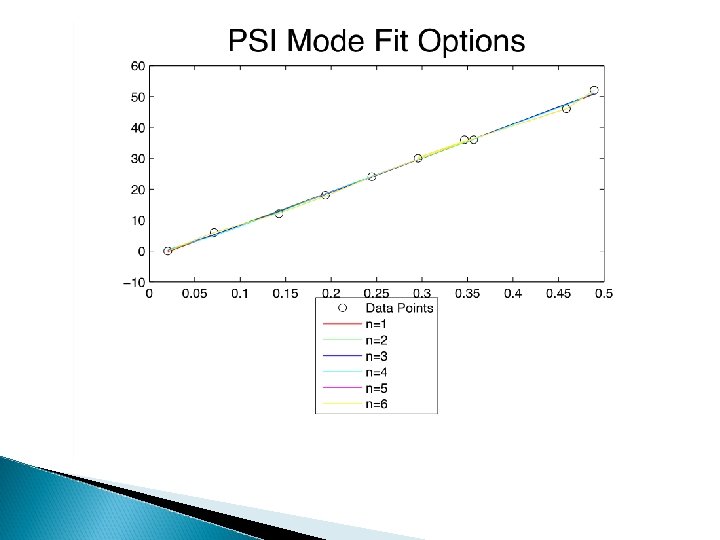
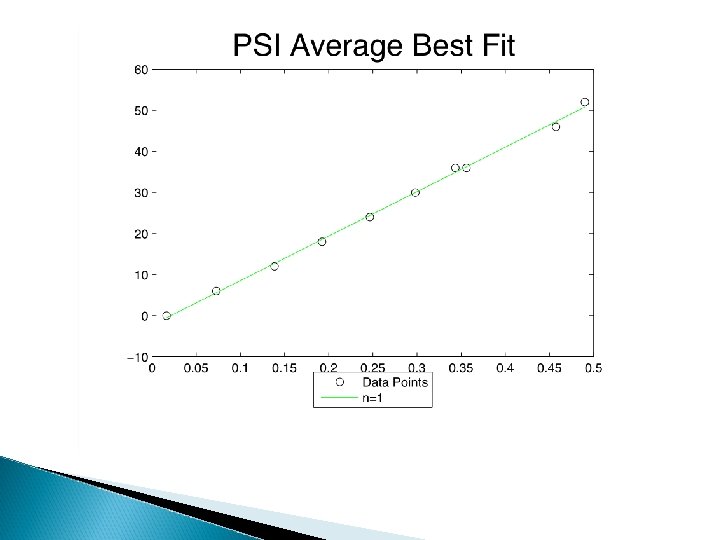


Depth Conversion Variables: Average Function: Mode Function: Amalgamation:
 close_kalman() kalman_update( time, status )")
Kalman Filter Created a kalman library ◦ ◦ init_kalman() close_kalman() kalman_update( time, status ) kalman_get_location( &loc ) Manages the Cv. Kalman class from Open. CV

Kalman Filter State Equation: • • • : : : state vector transition matrix - relates state vectors control matrix – relates control to state control vector noise vector (k represents current time)

Kalman Filter State Equation:

Kalman Filter Measurement Equation: • • : : measurement vector relates state to measurement state vector noise vector (k represents current time)

Kalman Filter Measurement Equation:

Kalman Filter

Future Work Continue Kalman Filter library ◦ ◦ ◦ Add control elements – Use angle and rotation angle to fix accelerations Add velocity sensor for better results Consider measured covariance matrices Use vision to rectify location Incorporate acoustic pinger triangulation Other related work ◦ Build standard course with dimensions ◦ Develop visual tool

Questions
- Slides: 21