STEPPER AND SERVO MOTOR Stepper motor Dc motors










 Security (surveillance products) Medical (scanners, dental photography) Consumer")











- Slides: 23
STEPPER AND SERVO MOTOR
• • • Stepper motor Dc motors Moves In discrete steps By energising the coils motor rotates one step at a time Electromechanical device Full rotation divided in to number of steps Stepper motor requires microcontroller to energise each electromagnet and make the motor shaft turn. Each rotation from one electromagnet to next is called step With computer controlled stepping you can achieve precise positioning and speed control. Main principle of circuit is to rotate motor step wise at a step angle.
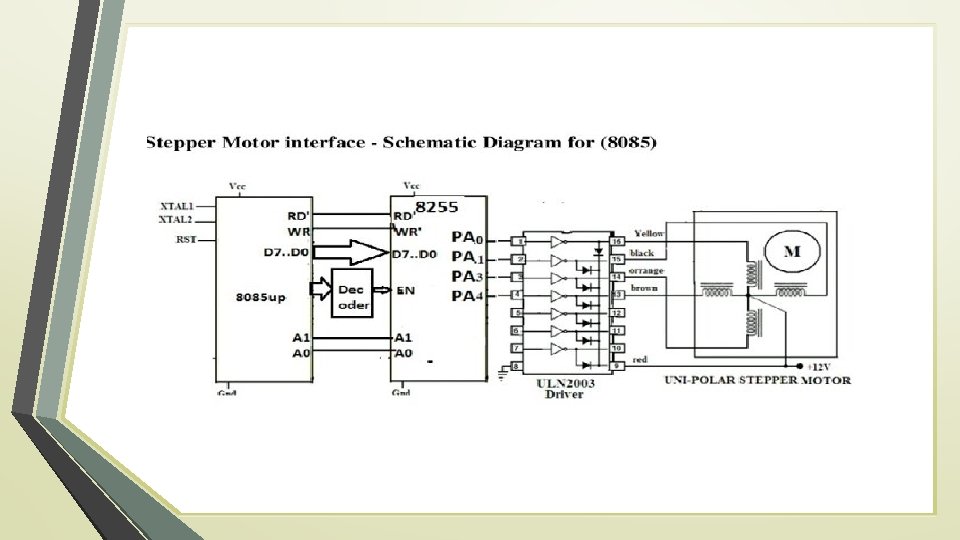
INTERFACING STEPPER MOTOR WITH MICROPROCESSOR:
PROGRAM: • MOV R 0 # COUNT • MOV DPTR, #ETC • MOV R 1, #04 • MOVX A, @DPTR • MOV P 1, A • LCALL DELAY TO BE CONTINUED;
• INC DPTR • DJNZ R 1, BACK • DJNZ R 0, AGAIN • RET • ORG 3000 H • DB 03 H, 06 H, 09 H, 0 CH;
ALGORITHM: STEP 1: start the process, STEP 2: initialize rotation count, STEP 3: initialize pointer to excitation code table, STEP 4: initialize counter to excitation code sequence, STEP 5: get the excitation code,
STEP 6: send the excitation code, STEP 7: increment the pointer, STEP 8: decrement R 1; if not zero goto BACK, STEP 9: decrement R 0; if not zero goto AGAIN, STEP 10: stop the process.
FLOWCHART: START INITIALIZE ROTATION COUNT INITIALIZE POINTER TO EXCITATION CODE A
A INITIALIZE COUNTER TO EXCITATION CODE GET THE EXCITATION CODE SEND THE EXCITATION CODE A
A INCREMENT THE POINTER DECREMENT R 1 DECREMENT R 2 STOP
APPLICATIONS INDUSTRY(machine tooling automated production equipment) Security (surveillance products) Medical (scanners, dental photography) Consumer electronics(cameras) Robotics Mechatronics Matrix printers Telescopes Toys
ADVANTAGES: � Consumes less power � Low operating voltage � low cost � high reliability � high torque at low speeds � a simple rugged construction that operates in almost any environment.
DISADVANTAGES � Low efficiency. �Torque drops rapidly with speed (torque is the inverse of speed). �Low accuracy. �Prone to resonances. �No feedback to indicate missed steps. �Low torque to inertia ratio. �Motor gets very hot in high performance configurations. �Motor will not "pick up" after momentary overload.
SERVOMOTOR A servomotor is a rotatory actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. servo motor is a assembly of four things Dc motor, gearing set, control circuit, position sensor TYPES →AC -2 phase and 3 phase →DC-separately excited, permanent magnet, brushless dc motor
LINKING SERVO MOTOR WITH MICROPROCESSOR 8085
INTERFACING: • EVEN A SMALL MOTOR REQUIRES A CURRENT OF 400 m. A FOR ITS OPERATION. • IF SUCH A MOTOR IS CONNECTED DIRECTLY TO THE PROCESSOR PORTS , MOTOR MAY DRAWS A LARGE CURRENT FROM THE PORTS AND DAMAGE IT. • HENCE A SUITABLE DRIVER IS USED TO OPERATE THE MOTOR.
MOTOR DRIVER CIRCUITS � This circuits are available only in IC forms. � UNL 2003 is one such driver IC which is high current and high voltage darlington transistor array � It can give a 500 m. A which is sufficient to drive motor � It has a protection circuit to protect a motor from damage due to back emf and large eddy current � So this motor is used to link the motor and microprocessor 8085
Advantages interfacing with microcontroller • Microcontrollers are cheap • very small in size • they can be embedded on any device. • Programming of Microcontrollers is simple • We can use simulators on Computers to see the practical results of our program. • we can work on a Embedded project without even buying the required Components and Chips. • we can virtually see the working of our project or program
ADVANTAGES DISADVANTAGES �Closed loop control �More complex control-tuning �High torque at higher speed required �Position feedback required �High overall system cost �Very efficient �Lower motor heating �Better choice for variable load system
APPLICATION Ø Ø Ø Ø Robotics Conveyor Belts Camera Auto Focus Robotic Vehicle Solar Tracking System Textiles Printing Presses/Printers: Automatic Door Openers
CONCLUSION � The basic difference between stepper & servo is type of motor & how it is controlled � Steppers don’t require encoders � Servo require an encoder to keep track of their position
THANK YOU!