Status of SPARC Undulator F Ciocci ENEA FisMat









 magnetic field B at")





- Slides: 17
Status of SPARC Undulator F. Ciocci ENEA Fis-Mat
Undulator parameter set Periods 2. 8 cm No of periods 77 Gap (nom. , min, max) 0. 925, 0. 6, 2. 5 cm K (nom. , min, max) 2. 145, 3. 2, 0. 38 Drifts between undulator sections 36 cm PM remanent field 1. 3 T Blocks period 4 Bock size (h x t x w)* 2 x 0. 7 x 5 cm * H= height t= thickness, w= width
Electron beam parameters Beam Energy 150 Me. V Peak current 100 A Energy Spread (slice) < 0. 1 % Emittances (slice) 1 mm mrad Numerical codes used for FEL simulations PROMETEO PERSEO PARSIFEL GINGER GENESIS (ENEA) (ENEA-codice semi-analitico. )
FEL power evolution vs longitudinal coordinate z (lu = 2. 8 cm, K = 2. 1413, I = 100 A)
Mechanical tollerances Deflection of the undulator support structure, induced by the weight and by the attraction between the undulator surfaces, determined by the magnetic forces Misalignment of the undulator pole faces with respect to mid plane axis
Transverse misalignment of the undulator pole faces with respect to mid plane axis Misalignment of the undulator pole bars with respect to z axis
Combined effect of the misalignment and of the deflection due to the magnetic forces on the evolution of the FEL power Effect of the induced deflection and misalignment on the evolution of the power of the fundamental and higher order harmonics d= 10 mm f = 5 mrad.
analysis of magnetic field errors • We have performed a numerical simulation of the effect on FEL power behaviour of the magnetic field errors due to the magnetic blocks characteristics. • We have assumed that the maximum deviation between the single block magnetization is 1% and 1° is the maximum deviation of the magnetization axis. • Assuming that the magnetizations of the single blocks and the relevant orientations have gaussian distributions, we find, that they are characterized by the rms values
Pierce parameter conditions DT=k 0. 3° C
Undulator Technical specifications • Value of the on axis (peak) magnetic field B at a gap of 0. 925 cm • R. M. S. relative peak magnetic field • First field integral • Second field integral • Accuracy of the single period to maintain the Phase locking Dlu along the undulator 8. 27. 103 G < 10 -3 < 0. 5 G. m < 0. 6 G. m 2 < 20 mm
ACCEL Hybrid Undulator for DELTA
TIME SCHEDULE 1 Detailed Undulator design Construction and factory testing of the first Undulator Prototype Section Construction and factory testing of the 5 Undulator Series Sections ENEA Acceptance Test 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21
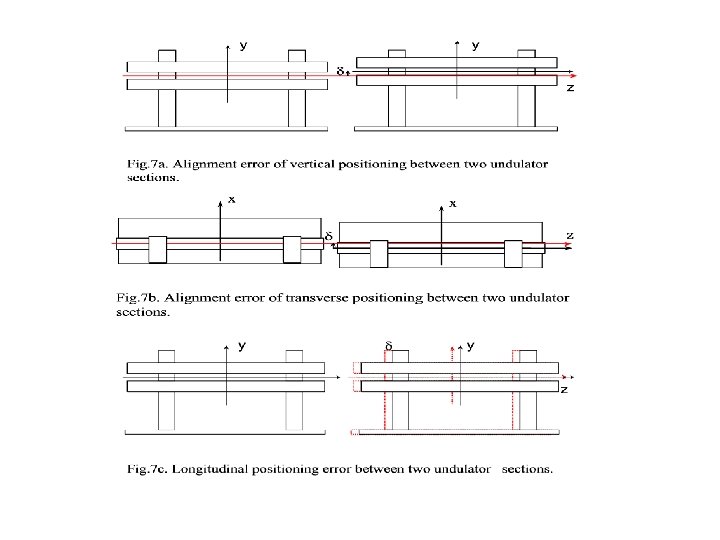
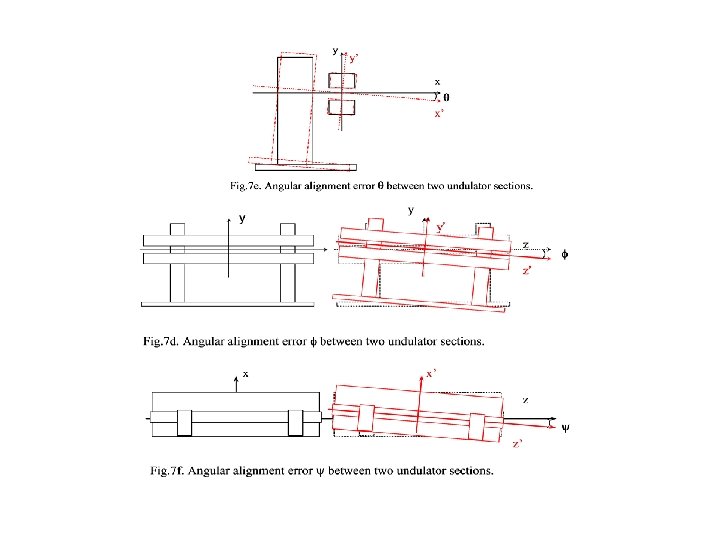
Mechanical alignment of the sections Each section must foresee the necessary equipment to fulfil the following tolerances for the mechanical alignment of the complete undulator device q Maximum Error of transverse positioning (vertical and horizontal) q Maximum Error of longitudinal positioning q Maximum error of angular alignment (f) q Maximum error of angular alignment (q) q Maximum error of angular alignment (y) 50 mm 5 mrad 100 mrad
Sparc versus Sparx Current 2000 A Energy 1150 Me. V Energy Spread 0. 5 10 -3 Emittances 1 mm mrad
Power vs. z