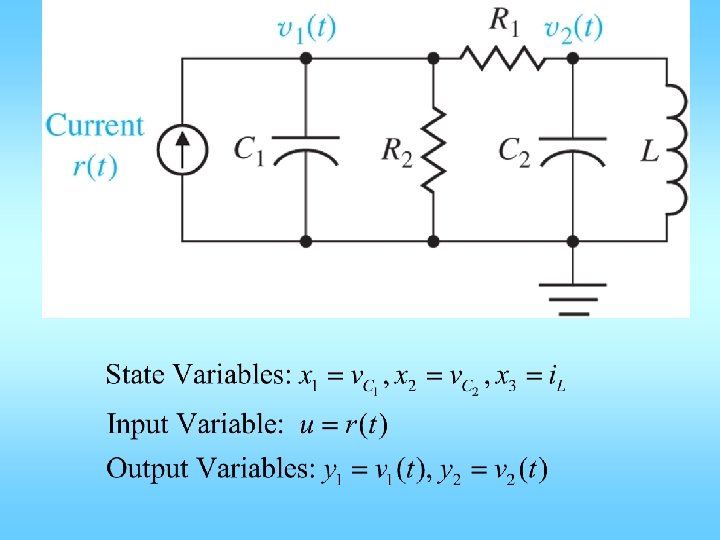
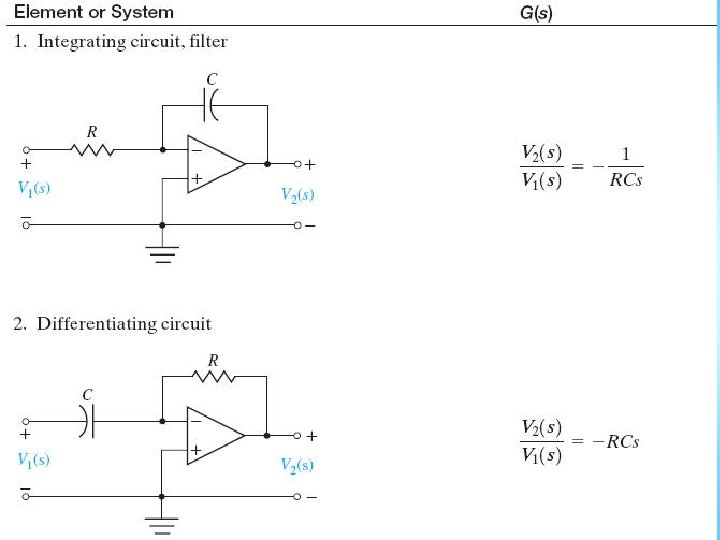
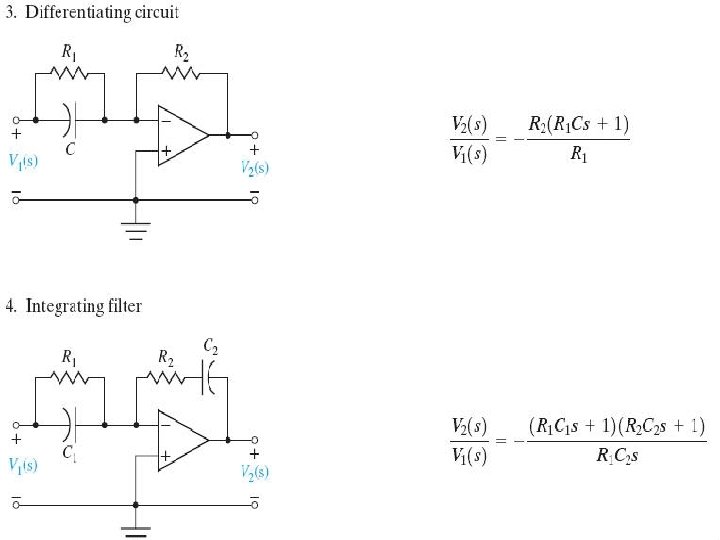
State Space circuit model Op Amp circuit example







 is measured from equilibrium position")
= or")







- Slides: 38
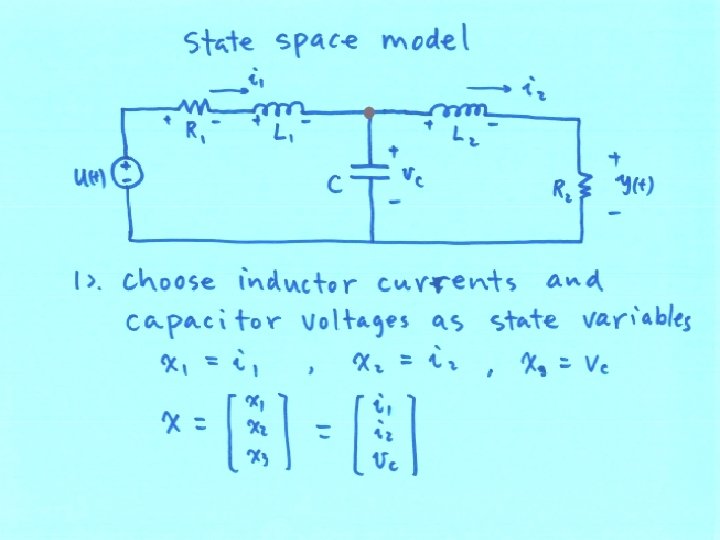
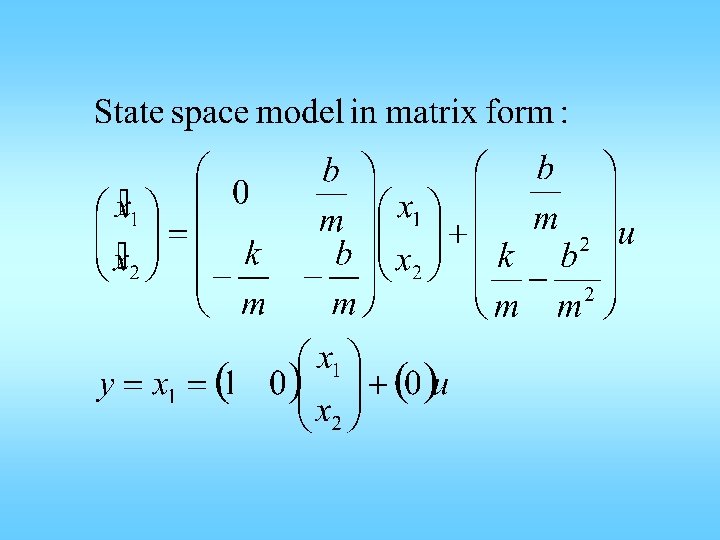
State Space circuit model
Op Amp circuit example Note: ip 1=0, ∴vp 1=vo=v. A & v. B=vp 2=0 Let v. C 1 & v. C 2 be s. v. , vo output.
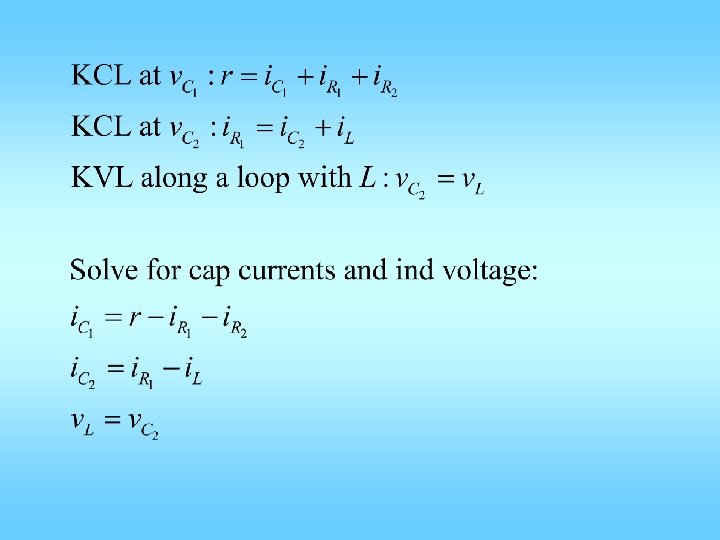
KCL at A: vo is not s. v. nor input, use vo=v. C 2
KCL at B: 0 vo 1 not s. v. nor input, vo 1=v. A+v. C 1=vn 1+v. C 1 =vp 1+v. C 1=vo+v. C 1 =v. C 2+v. C 1
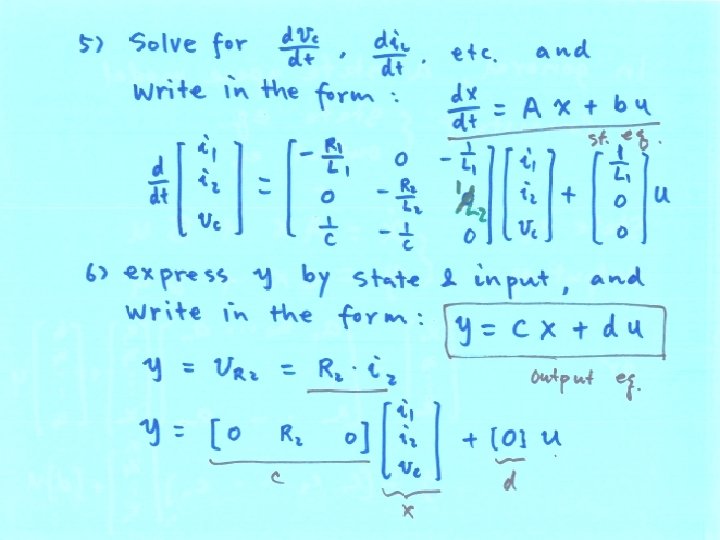
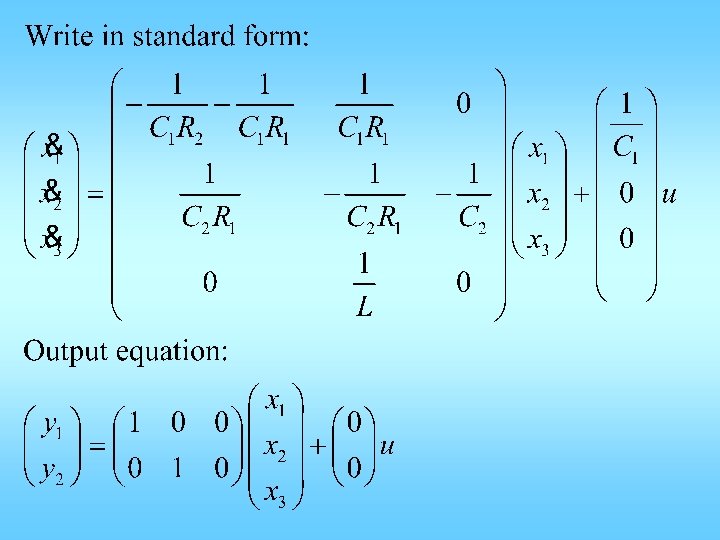
Output eq:
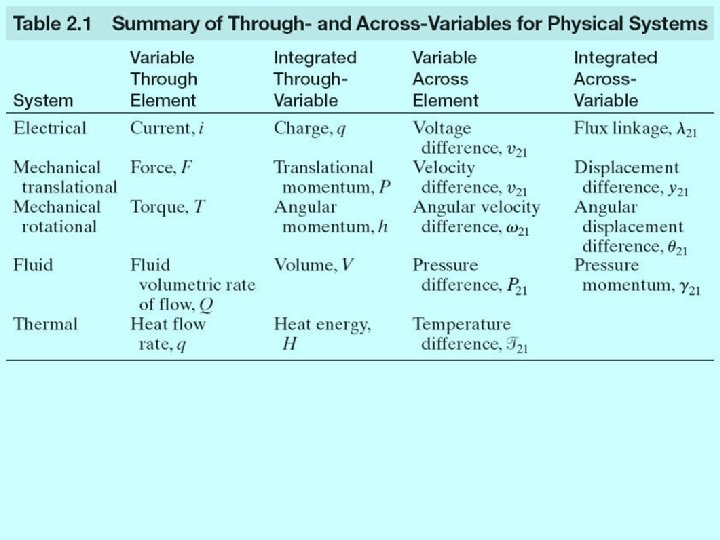
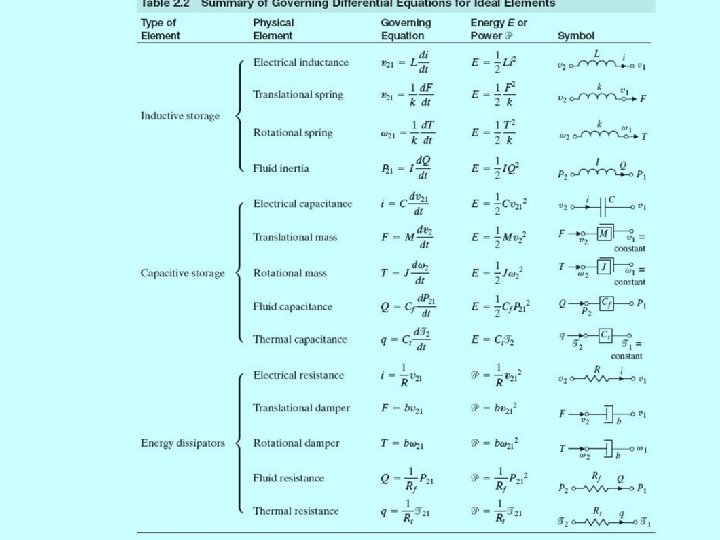
Physical Laws for Mechanical
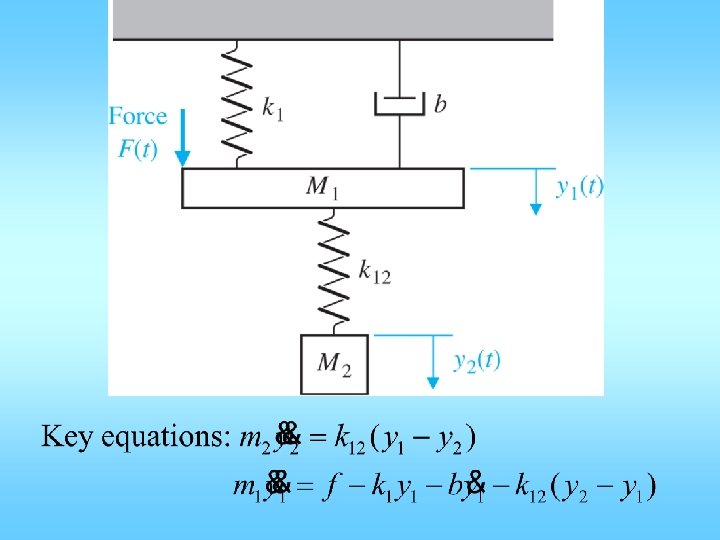
Example: car suspension
Car suspension: simplified Ignore tire deformation. Suppose y 1(t) is measured from equilibrium position when gravity has set in. So gravity is canceled by spring force at eq. pos. ∴There are two forces on m: y 1(t) x(t)
Newton’s Law: or num= den= T. F. =H(s)= or
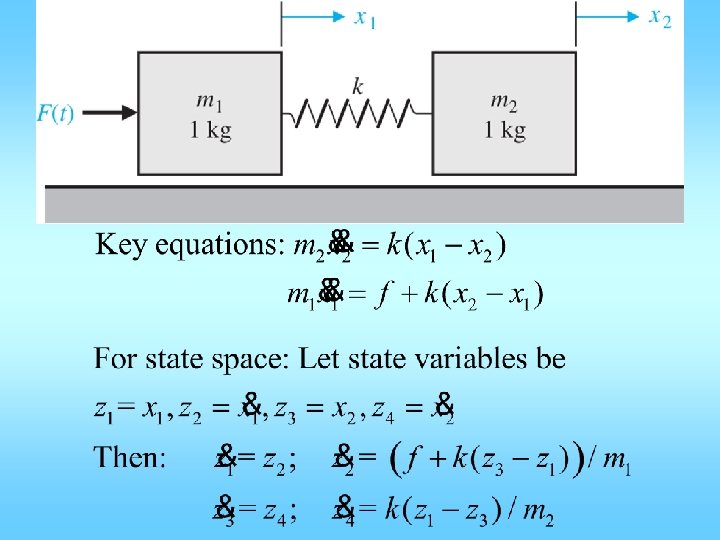
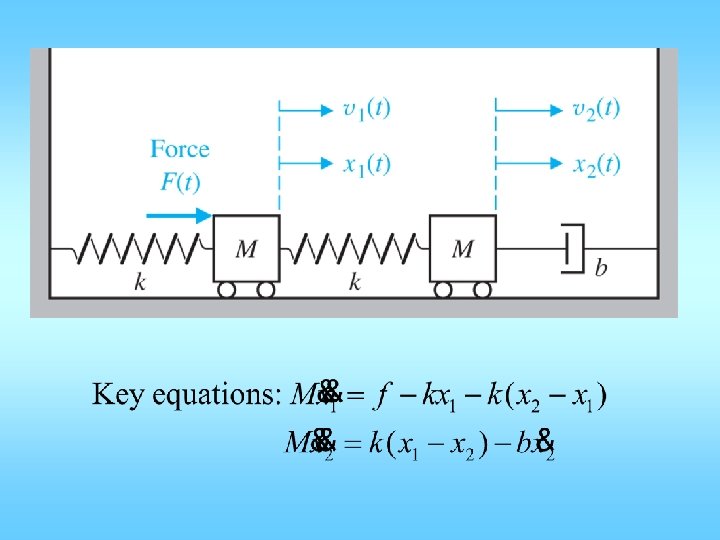
State Space Model • For linear motion – Define two state variables for each mass – x 1=position, x 2 = velocity; x 1 -dot = x 2 – x 2 -dot is acc and solve for it from Newton’s • For angular motion – Define two state variables for each rotating inertia – x 1= angle, x 2 = angular velocity; x 1 -dot = x 2 – x 2 -dot is angular acc and solve for it from Euler’s law
Quarter car suspension
u
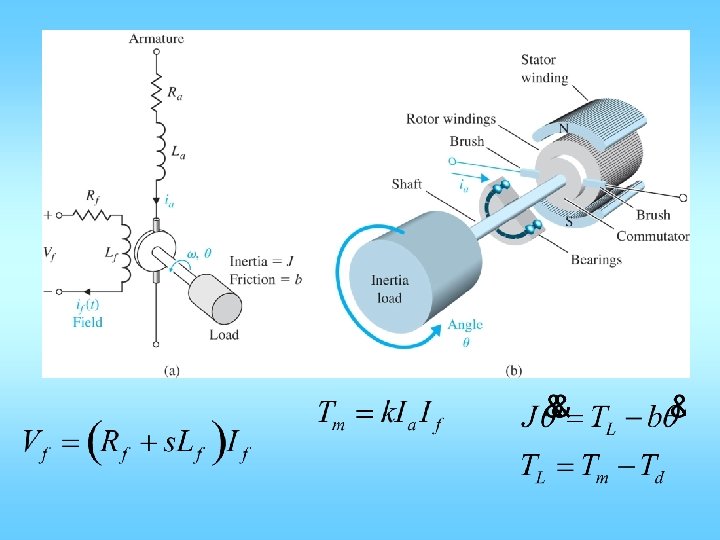
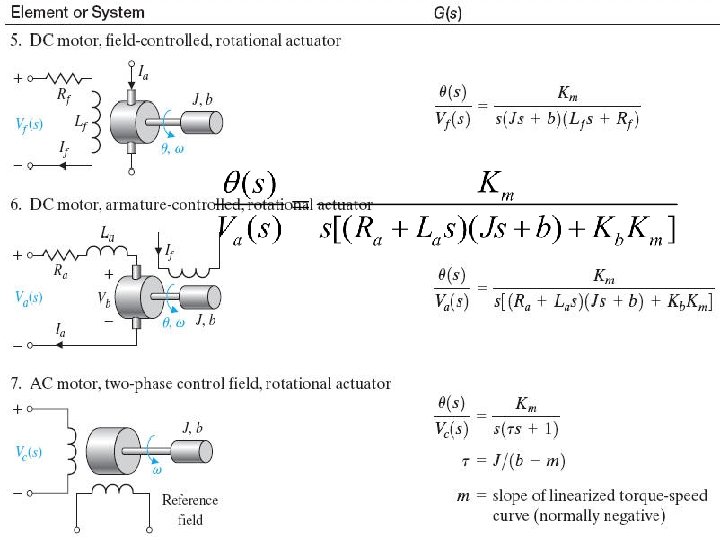
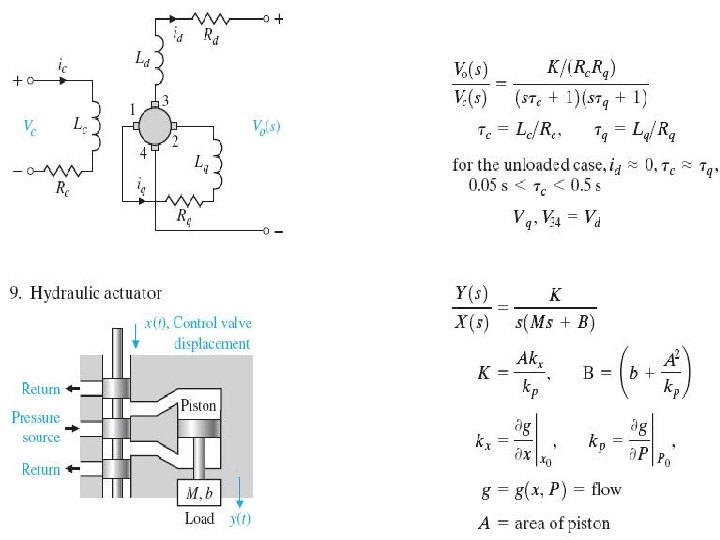
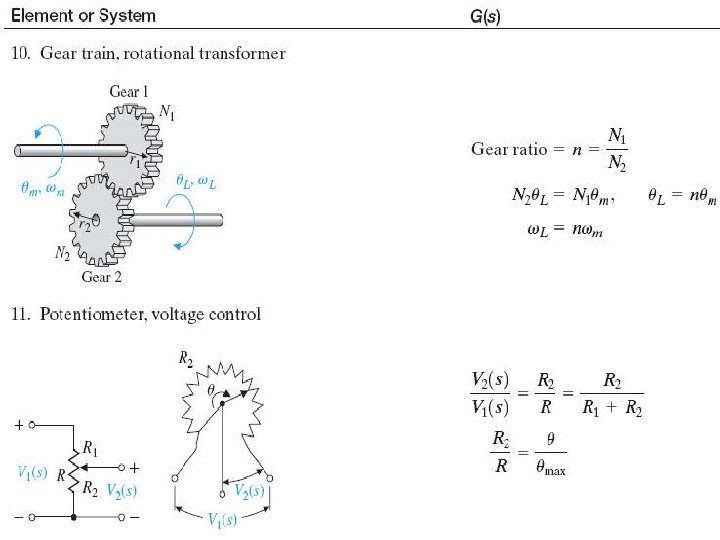
Electromechanical systems • Motors – DC motors – Induction motors – Variable reluctance motors • • Generators Angular position sensors Encoders Tachometers
For field control with constant armature current For armature control with constant field current
Armature controlled motor in feedback
Get TF from wd to w and Td to w.