Star Recognition Approach Real CCDcamera picture of the






 n Steady-state")
 8")





![Control strategy If (m, [wrel H]) < then m=0 n else n 14](https://slidetodoc.com/presentation_image_h2/db582ac4f658401f1ecee224409d24f1/image-14.jpg "Control strategy If (m, [wrel H]) < then m=0 n else n 14")



- Slides: 21
Star Recognition Approach Real CCD-camera picture of the starry sky obtained from the Swedish Astrid 2 satellite. White bright segment is the Earth. Light strips are created by stars due to the angular motion of the satellite. Others light points are generated by noisy. 1
Simulation of the Star Recognition Algorithm Simulation of the star recognition algorithm. Blue rectangular represents the field of view of on -board CCD-camera. The same is shown in the upper-left picture. Recognized stars with their numbers within the Star Catalog are shown in the upper-right picture. The straight line links two mutually outermost stars. Transformation matrix D is calculated (right-side formula) via unit vectors of the two stars which are taken from the Catalog and calculated through measured 2 data.
MUNIN Nanosatellite Engineering Model 3
Attitude Control System n Content of ACS n n n Permanent magnet 8 hysteresis rods Content of AD n n 4 photodiods horizon sensor 5
Nanosatellite TNS-0 Parameter Magnitude Altitude ~ 360 km Inclination 51. 6 degrs Power sources Two batteries Mission control Global. Star/Internet Bands 1. 6/2. 5/1. 7 GHz Mass 4. 5 kg ACS Passive magnetic 6
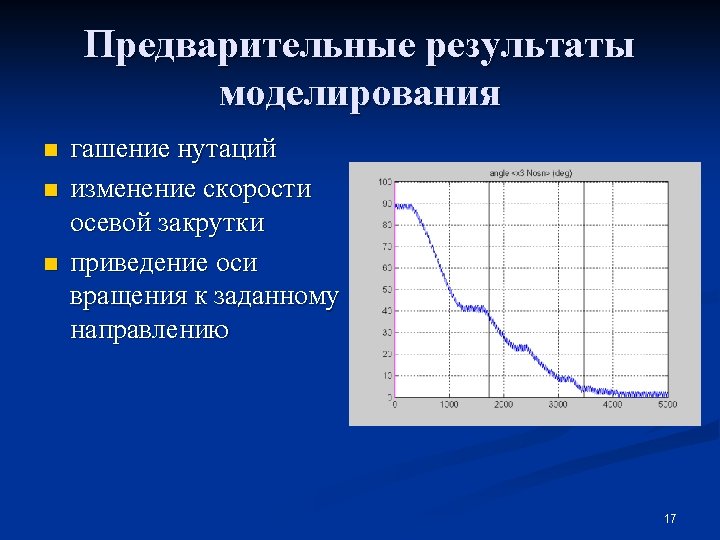
Attitude Motion Analysis n Acquisition motion: (initial angular velocity is 3 degrs/sec) n Steady-state motion: 7
TNS-0 N 1 Launch Campaign (ISS, 28 th of March, 2005) 8
Gravity-gradient ACS with magnetic torquers Pakistanean BADR-B experimental satellite (launched on 10 th December, 2001 with Meteor-3 M) n n n 50 kg mass Sun-synchronous orbit (1050 km altitude and 98 degrees inclination) 3 -5 degree accuracy required 11
Algorithm of preliminary orientation along vector B Angle between axis Oz and vector B (unit: degrees) vs number of revolutions around the Earth. Librations in the vicinity of tumbled equilibrium position with angle of 180 degrees correspond to required preliminary orientation of the satellite 12
Active damping of disturbed motion The Jacobi’s integral V for circular orbit is used as a measure of deviation of the satellite from required equilibrium n Derivative of V is governed by control torque n 13
Control strategy If (m, [wrel H]) < then m=0 n else n 14
Usage of the algorithm of magnetic orientation to provide a gravity-gradient orientation S N 15