Standing Balance Control Using a Trajectory Library Chenggang

Standing Balance Control Using a Trajectory Library Chenggang Liu and Chris Atkeson

Outline • Introduction • Robot Model • Neighboring Optimal Control • Balance Controller • Simulation and Experiment Results

Introduction Multiple Balance Strategies from One Optimization Criterion.

Robot Model
")
Trajectory Library Generation • Combined Method – Direct minimization with SNOPT (Sequential Quadratic Programming) – Differential Dynamic Programming • A library on a uniform grid of initial conditions

Neighboring Optimal Control Given the discrete time dynamics of the robot: and the optimal value function: The neighboring optimal control is given by: Where

Neighboring Optimal Control Having the optimal trajectories of state over time, , control over time, , and the gain matrices over time, . A local approximation to optimal control is: where is the closest state to the current state on , and are those corresponding to on and.

Controller Architecture

Trajectory Library Generation • The library is refined to get a new library on an adaptive grid of initial conditions according to the proposed controller’s performance.

State/Push Estimation State to be estimated: Measurements:

State/Push Estimation State transition and observation models

State/Push Estimation To predict the next state before measurements are taken: To update the state after measurements are taken:

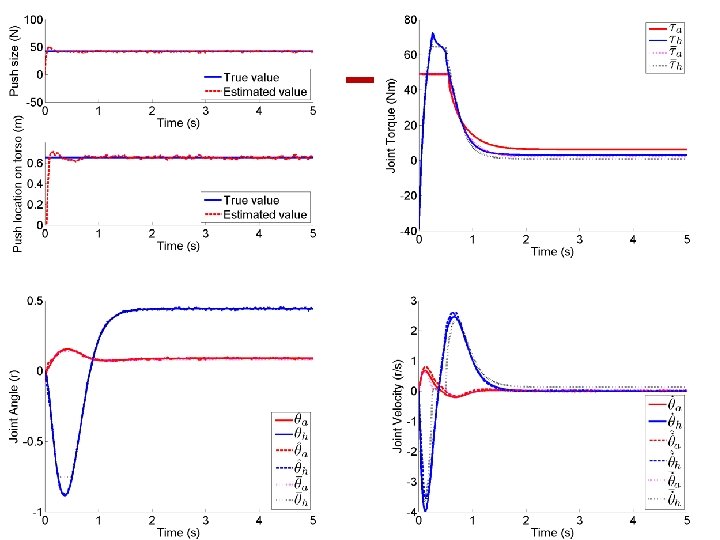
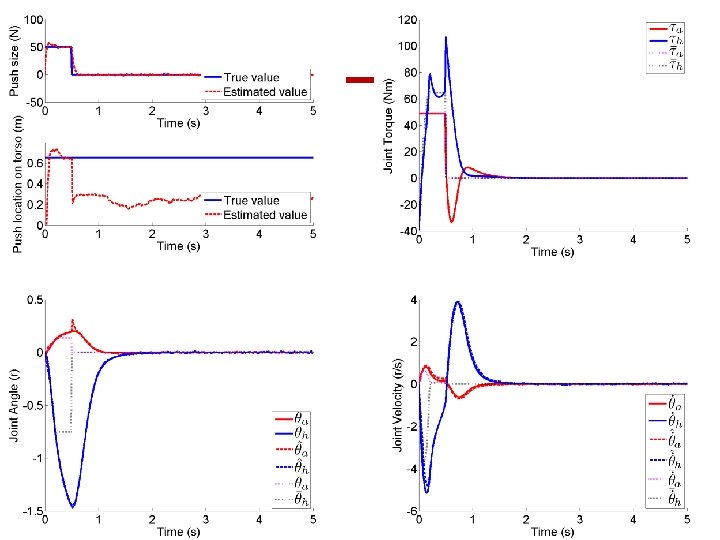
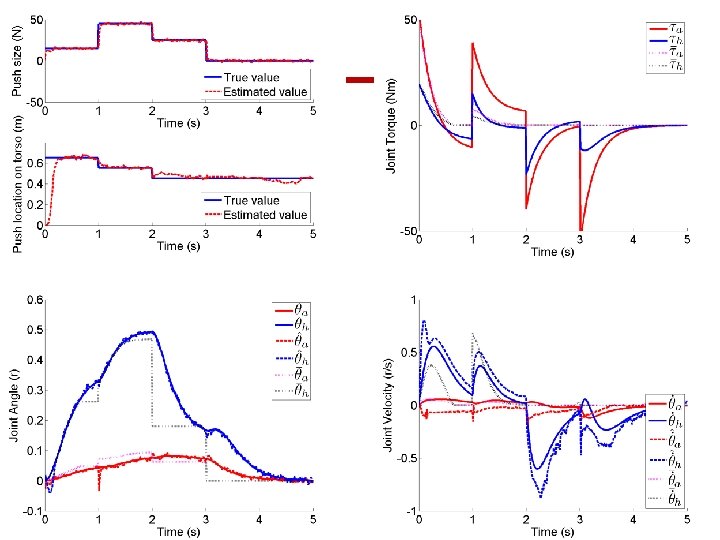
Simulation Results • Constant push of 42 Newtons at head • Short forward push at head of 50 Newtons, lasting 0. 5 seconds • Random pushes sequence

Simulation Results • Comparison with the optimal controller.

Experiment Result • Push forward Trajectory index State index

Experiment Result • Push backward Trajectory index State index

Thanks! For more information: http: //www. andrew. cmu. edu/user/cgliu/Current. RD. html
- Slides: 20