Standard Brain Model for Vision The talk is

Standard Brain Model for Vision The talk is given by Tomer Livne and Maria Zeldin

Overview Introduction to biological basis of vision n Computer analogy to biology n Implementation n Discussion n

Overview of biological vision Hierarchical structure n From simple features to complex ones (Hubel & Weisel) n Increased invariance n
 following experimental results proposed a model")
The basic idea Hubel and Weisel (1962, 1965) following experimental results proposed a model in which neighbouring simple cells are combined into complex cell. The result is complex cells with phase independence.

Max vs. sum pooling Electrophysiological results indicate that pooling may not be linear, the response of a complex cell can be best described by the activity of its maximal afferent.

From simple to complex cells:

A straightforward extension of this is to start with simple cells and end up with “higher-orderhyper-complex cells”. This is the basis for all the hierarchy idea!

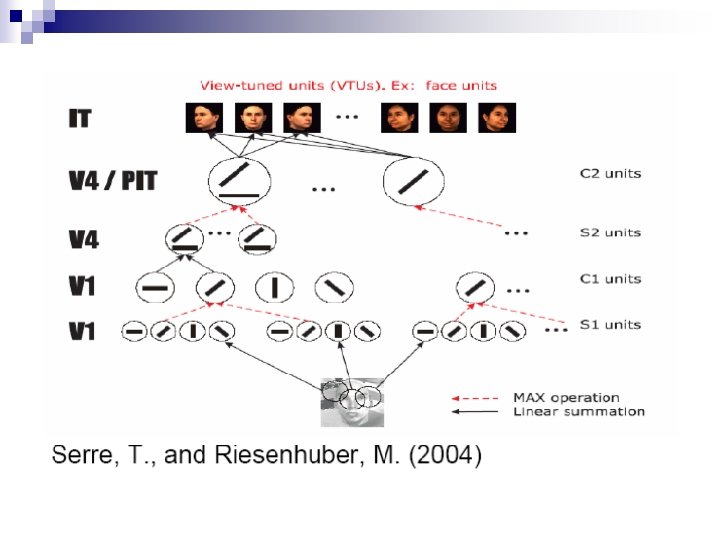
The hierarchy based on the brain model: Hierarchical models of object recognition in cortex. Reisenhuber and Poggio. Nature, november 1999.

Clearer explanation of the hierarchy orientations - 1 0. 7 | 0 0. 7 0 0 / 0 0 | / Max pooling Simple cells 1 0. 7 0 0 Complex cells

Computer vision Usual approach – image patching n Biological motivated approach hierarchy n

Representing objects by invariant complex features The IT area in the brain is dealing with object recognition. In this area there are cells that respond best to a specific object Hierarchical models of object recognition in cortex. Reisenhuber and Poggio. Nature, november 1999.

Recognize the same faces

In the previous task our brains did a very good job in recognizing same face even thou the scale, impression, illumination were different. And did not classified different faces as same even thou they have similar physical conditions

Motivation The presented approach is trying to implement into a computer system the hierarchical idea that was presented. In order to achieve similar robustness.

The models that we present deal with more general problem which is object classification. We can say that the problem of recognition of different transformations of an object is similar to the problem of classification.
 demonstrate that it")
Can computers reach similar properties to biology? Reisenhuber & Poggio (1999) demonstrate that it can. Comparing electrophysiological results from cells in the monkey brain with implemented hierarchical model.

Training stage: The monkey was trained to recognize restricted set of views of unfamiliar target stimuli resembling paperclips. They check which IT cell responds best to all views. After finding the cell that responded the most was picked for the study.

Test stage: The best reaction of the cell was to the trained data. The second best was to new transformations of the trained object. And very little response to new objects (distractors)

Learning the results: Hierarchical models of object recognition in cortex. Reisenhuber and Poggio. Nature America Inc, november 1999.

The hierarchy based on the brain model: We saw this part Now lets compare it to the model Hierarchical models of object recognition in cortex. Reisenhuber and Poggio. Nature, november 1999.

Hierarchical models of object recognition in cortex. Reisenhuber and Poggio. Nature America Inc, november 1999.

Results of scrambling Hierarchical models of object recognition in cortex. Reisenhuber and Poggio. Nature America Inc, november 1999.

Summary § Goal- brain based object classification § Biology view of the problem § implementation of hierarchical structure § comparing true results to model results

What’s next? § Models based on the hierarchical idea we already discussed § Riesenhuber & Poggio (1999) § Serre & Riesenhuber (2004) § Serre, Wolf, Bileschi, Riesenhuber, & Poggio (2007) § Mutch & Lowe (2006) § Modifications of the basic ideas § limitations and shortcomings

Method #1 Riesenhuber & Poggio , ”Hierarchical models of objects recognition in cortex”, Nature 1999 Later it was modified by Serre, Wolf, Bileschi, Riesenhuber, & Poggio, “Robust object recognition with cortex-like mechanisms”, 2007.

n S 1 – Gabor filters ¨ 16 different sizes (7 X 7, 9 X 9, …, 37 X 37) ¨ 4 orientations ¨ A total of 64 S 1 type detectors Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

A serial implementation of filtering

n C 1 – MAX pooling ¨ 8 different sizes (8 X 8, 10 X 10, …, 22 X 22) ¨ 4 orientations ¨ A total of 32 C 1 type detectors ¨ Used to define features during the learning stage Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

n S 2 – learned features ¨ Holds N learned features ¨ 4 patch sizes (4 X 4, 8 X 8, 12 X 12, 16 X 16) indicating how many C 1 neighboring cells are considered (this is done separately for each C 1 scale) ¨ For each image patch X, a Gaussian radial basis function that depends on an Euclidean distance, is calculated from each of the stored features Pi (i=1: N) r=exp(-β ||X – Pi||²)

Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

n n C 2 – max pooling ¨ For each stored feature the best match (closest) Classifier ¨ Classification is based on both C 1 and C 2 Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.
 n Output")
Summery 4 Layers of processing n 2 types of operations (Max, Sum) n Output – N dimensional vector n

Model’s performance Testing the model n Defining features n Flexibility of the design n

Robustness to background n n n Ignoring presented unrelated data Training and test images contains both targets and distractors Performed best with C 2 type detectors Simple detection – present/absent (no location information) Approaches maximal performance with 1000 -5000 features Performance improve with increased training (more examples) Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

Object specific features or a universal dictionary n n A Universal dictionary based system is good for small training sets (10, 000 features) An object specific based system is better when using large training sets (improves with practice – increased number of features [200 an image])

Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

Object recognition without a clutter n Scene understanding using a windowing strategy n Large inter-category variability n Training sets of only either positive (target) or negative (no target) n 2 classification systems: C 1 and C 2 based n C 1 based system performs better (able to efficiently represent objects’ boundaries)

Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

Texture based objects n n Again C 1 and C 2 based classifiers C 2 features are now evaluated only locally, not over all image locations C 2 based classification is better (the features are more invariant and complex) Evaluated by correct labeling of pixels in the image Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

A unified system – looking at multiple processing levels n n n The hierarchical nature of the described system enables the use of multiple levels of feature Recognizing both shape and texture based objects in the same image Two processing pathways

Robust object recognition with cortex-like mechanisms. Serre, Wolf, Bileschi, Reisenhuber and Poggio. IEEE, march 2007.

Scene understanding task n n Complex scene understanding requires more than just detection of objects, location information of the detected objects is also required Shape-based objects C 1 based classification, using a windowing approach, for both identification and localization ¨ Local neighborhood suppression by the maximal detected result ¨ n Texture-based objects ¨ ¨ C 2 based classification texture boundaries posses a problem (solved by additionally segmenting the image and averaging the responses within each segment)

Model summery Hierarchical design n Efficiency n Multiple processing pathways n Universality Vs. specificity n Limitations n

Method #2 Mutch & Lowe Multiclass Object Recognition with Sparse, Localized Features. 2006.

n n Image scaling – 10 scales S 1 – Gabor filters Single scale (11 X 11) ¨ 4 orientations ¨ applied to every location ¨ Evaluated at all possible locations ¨ Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006
X")
n C 1 – local invariance ¨ Max pooling using a 10 X 10(size)X 2(scale) filter ¨ Each orientation is tested separately ¨ used to define features during the learning stage ¨ Larger skips Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

n S 2 – intermediate features ¨ 4 filter sizes (4 X 4, 8 X 8, 12 X 12, 16 X 16) defined by the stored features ¨ A Universal feature set ¨ Response to each filter (feature) is calculated as R(X, P) = exp[-(||X – P||²)/2σ²α] Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

n C 2 – Global invariance ¨A vector of size d of the maximal response (anywhere in the image) to each feature. n SVM classifier ¨ Majority-voting decision based Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

The overall look on all the stages: Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

Summary Similar assumptions n Differences in construction n

Model performance and improvements Testing classification n More biologically motivated improvements n
 Trained sets of 15")
Tests classification n n n 101 categories (from Caltech 101) Trained sets of 15 (or 30) images of each category Learn random features (in both size and location), an equal number for each category Construct C 2 vectors Train the SVM (on the improved model also perform feature selection) Test stage

Results of the test: Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

To get better results, some improvements were added to the model: n n n S 2 – encodes only the dominant orientation at each location. Increased number of tested orientations (from 4 to 12) Lateral inhibition – suppressing below threshold filter outputs in S 1 & C 1 layers Limited S 2 invariance – in order to allow for preserving a certain amount of geometrical relations, S 2 feature are limited to certain places in the image (relative to the center of the object) Select only good features for classification

Running the previous test on the improved model lead to the following results: Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

Refining the model Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

Tests detection/localization n Sliding window Merging overlapping detections Single/multiple scale test images Multiclass Object Recognition with Sparse, Localized Features. By Mutch & Lowe. IEEE 2006

Summery Efficiency n Improvements n Limitations n

THE END Thank you for listening!

n Simple cell is an early visual neuron meaning it responds best to a line of a specific size, orientation, and phase. This cell responds best to 180 deg. phase. This cell responds best to 90 deg. phase.

back
 Complex cell (phase insensitive) back")
Image Simple cell (phase sensitive) Complex cell (phase insensitive) back
- Slides: 63