Stabiilsus Olgu mittelineaarne dnaamiline ssteem antud kujul maatrikskujul
 nx 1 olekuvektor f")
Stabiilsus Olgu mittelineaarne dünaamiline süsteem antud kujul maatrikskujul kus x(t) nx 1 olekuvektor f nx 1 mittelineaarne vektorfunktsioon. – mitteautonoomne süsteem – autonoomne süsteem n – süsteemi järk x(t) – olekutrajektoor
 on olekud, mille puhul kõik olekumuutujad rahuldavad tingimusi Tähistame tasakaaluoleku –")
Tasakaaluolukord (equilibrium states) on olekud, mille puhul kõik olekumuutujad rahuldavad tingimusi Tähistame tasakaaluoleku – xe. Olgu xe isoleeritud tasakaaluolek st. tema ümbruses teisi tasakaaluolekuid ei ole. Tasakaaluolek xe on stabiilne parajasti siis, kui iga algoleku x 0 puhul, mis asub xe ümbruses, lahend x [ x 0, t ] on xe ümbruses.

Definitsioon Tasakaaluolek xe on stabiilne, kui iga R>0 leidub r>0 selline, et // x(t 0)-xe // < r, siis // x[x(t 0), t]-xe // < R kõikide t ≥ t 0 puhul. 1 – stabiilne 2 – asümptootiliselt stabiilne 3 - mittestabiilne 2 ● xe ●x(t 0) Sr 1 3 SR

Kokkuvõte lineariseerimisest mittelineaarne mittestatsionaarne lineaarne statsionaarne
 meetod 1. Lineariseeritud süsteem on stabiilne, kui maatriksi A omaväärtused")
Teoreem Ljapunovi esimene (lineariseerimise) meetod 1. Lineariseeritud süsteem on stabiilne, kui maatriksi A omaväärtused asuvad s tasandil vasakus pooltasandis. Tegeliku mittelineaarse süsteemi tasakaaluolek on asümptootiliselt stabiilne. 2. Lineariseeritud süsteem on mittestabiilne, kui vähemalt üks A omaväärtustest asub s tasandil paremas pooltasandis. Tegeliku mittelineaarse süsteemi tasakaaluolek on mittestabiilne. 3. Lineariseeritud süsteem on neutraalselt stabiilne, kui vähemalt üks A omaväärtustest asub s tasandi iω teljel. Tegeliku mittelineaarse süsteemi tasakaaluolek võib olla stabiilne, asümptootiliselt stabiilne või mittestabiilne.
, k ≥ 0 x(t), t ≥ 0 z=esh, h-diskreetimissamm")
Mõned z-teisendused: Pidev Diskreetne x(k), k ≥ 0 x(t), t ≥ 0 z=esh, h-diskreetimissamm s alati ei saa ! R=1 z
 Definitsioon (juhitavus) Süsteem (A, B) on täielikult")
Juhitavus, Jälgitavus Juhtarvuti Süsteem Juhitavus (A, B) Definitsioon (juhitavus) Süsteem (A, B) on täielikult juhitav parajasti siis, kui on võimalik selline juhttoime u(t), mis viib süsteemi algolekust x(0) suvaliselt valitud lõppolekusse x(T) etteantud aja T>0 jooksul.
 on täielikult juhitav, kui maatriksi astak on n. rank")
Juhitavuse kriteeriumid Süsteem (A, B) on täielikult juhitav, kui maatriksi astak on n. rank QC = n, kus n = dim[x(t)] Diskreetne süsteem:
 Süsteem (A, C) on täielikult jälgitav parajasti siis, kui algolek x(0)")
Jälgitavus Definitsioon (jälgitavus) Süsteem (A, C) on täielikult jälgitav parajasti siis, kui algolek x(0) on määratav väljundi vaatluste alusel vahemikus 0 t T. Jälgitavuse kriteeriumid: 1. (A, C) on täielikult jälgitav, kui maatriksi astak on n. rank Q 0 = n, kus n = dim[x(t)] Diskreetne süsteem:
= -Kx(t) Olgu süsteem (A, B) täielikult")
Juhitavuse ja jälgitavuse rakendused Juhtimissüsteem: süsteem tagasiside u(t)= -Kx(t) Olgu süsteem (A, B) täielikult juhitav Mida juhtimissüsteem peab tegema? Sisuliselt stabiliseerimissüsteem, hoiab süsteemi olekus
 tagasisidestatud süsteemi (soovitavad) omadused on")
tagasisidestatud süsteemi vabaliikumise võrrand. Karakteristlik polünoom * kus 1) tagasisidestatud süsteemi (soovitavad) omadused on antud φ(s) kujul; 2) võrrandist * leitakse tagasisidemaatriks K.

Diskreetaja süsteemi variant: täielikult juhitav tagasisidestatud süsteemi vabaliikumise võrrand karakteristlik polünoom antud arvutatakse ? ?
 y(t) kus Võrrand vabaliikumise võrrand on tagasisidestatud süsteemi")
Jälgimissüsteem: täielikult jälgitav u(t) y(t) kus Võrrand vabaliikumise võrrand on tagasisidestatud süsteemi
 Sisuliselt L on")
NB! Vabaliikumise võrrandi karakteristlik polünoom ? antud karakteristlik polünoom (soovitud omadused) Sisuliselt L on tagasisidemaatriks.
: Tagasisidestatud süsteemi vabaliikumise võrrand ? - antud")
Diskreetaja süsteemi variant: Süsteem: Olekutaastaja (olekuhindaja): Tagasisidestatud süsteemi vabaliikumise võrrand ? - antud
 2) 3) tagasisidestatud süsteemi karakteristlik polünoom (finiitne süsteem) !")
Näide No. 1 Antud: 1) 2) 3) tagasisidestatud süsteemi karakteristlik polünoom (finiitne süsteem) ! Leida: 1) K; 2) Analüüs Lahendus: 1) Juhitavuse kontroll 2) K arvutus ?
 Analüüs")
3) Analüüs
 2) u(t) = -Kx(t) 3) tagasisidestatud süsteemi karakteristlik")
Näide No. 2 Antud: Leida: 1) 2) u(t) = -Kx(t) 3) tagasisidestatud süsteemi karakteristlik polünoom 1) K 2) Tagasisidestatud süsteemi analüüs:
 Juhitavuse kontroll täielikult juhitav 2) K arvutus")
Lahendus: 1) Juhitavuse kontroll täielikult juhitav 2) K arvutus
 Analüüs x(0) m. o. t. t.")
3) Analüüs x(0) m. o. t. t.
 2) 3) Tadasisidestatud süsteemi karakteristlik polünoom (soovitud")
Näide No. 3 Antud: Pidevaja jälgimissüsteem 1) 2) 3) Tadasisidestatud süsteemi karakteristlik polünoom (soovitud omadused) Leida: 1) L 2) analüüsida süsteemi

Lahendus: 1. Jälgitavuse kontroll Veenduge, et antud süsteem on täielikult jälgitav!? 2. Tagasisidemaatriksi L arvutus ? vt. Näide No. 1 ja võrdle K=LT !?

Kontroll: 3. Analüüs
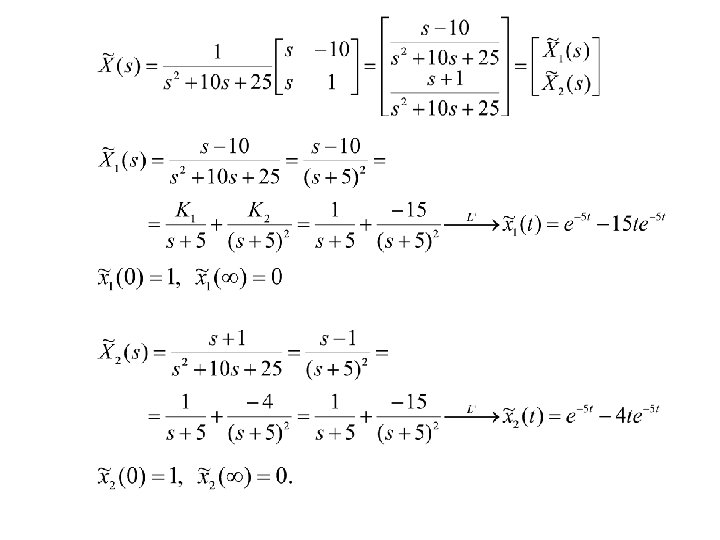

Kontrolliks kasutame veel piirväärtusteoreeme. m. o. t. t.
 2) Leida: 3) Karateristlik polünoom 1) L")
Näide No. 4 Antud: Diskreetaja jälgimissüsteem 1) 2) Leida: 3) Karateristlik polünoom 1) L 2) Analüüsida tagasisidestatud süsteemi ?

Lahendus: 1. Jälgitavuse kontroll Veenduge, et antud süsteem on täielikult juhitav. 2. Tagasisidemaatriksi L arvutus kus

Kontroll: 3. Analüüs k=0 k=1
- Slides: 28