Smart Systems SW ROS Get Started Guide Youngjoon




 설정 -터미널을 열고 아래의")


 소스 코드 작성 ## cd ~/catkin_ws/src/my_first_ros_pkg/src ##")
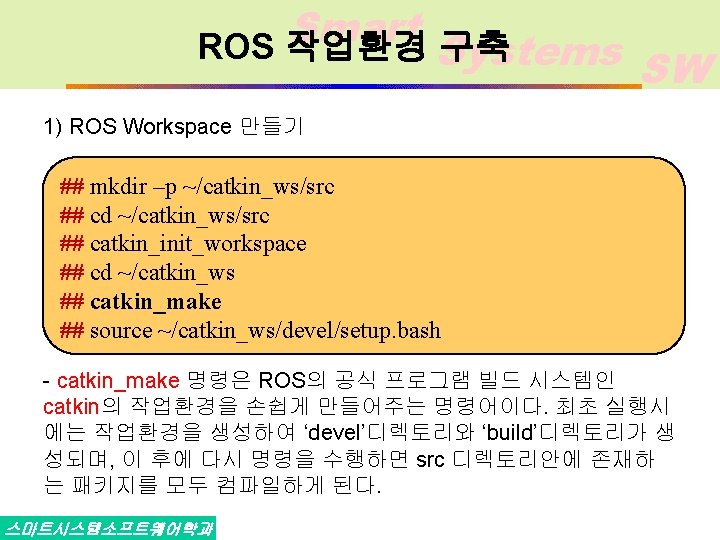
 패키지 빌드 Smart ROS Hello. World Systems SW ## cd ~/catkin_ws ## catkin_make")


- Slides: 19
Smart Systems SW ROS Get Started Guide Youngjoon Han young@ssu. ac. kr 스마트시스템소프트웨어학과
Smart Contents § Ubuntu 16. 04 LTS 설치 § ROS Kinetic 설치 1. setup source list 2. setup keys 3. installation 4. initialize rosdep 5. setup Environment § ROS 작업환경 구축 § ROS 파일 시스템 § ROS Hello. World 스마트시스템소프트웨어학과 Systems SW
Smart Ubuntu 14. 04 LTS 설치 Systems SW 1. 아래의 링크를 클릭하여 Ubuntu 16. 04 image를 다운받는다. https: //drive. google. com/file/d/0 Bzcbvhf. Efw. YGWEpxal. Z 6 VE 1 y. Rj. Q/view ? usp=sharing 2. VMplayer에서 다운받은 이미지를 가지고 새로운 VM을 생성한다. (id : ros, pw : root로 설정) ①Click! ②browse iso file ③ 스마트시스템소프트웨어학과
Smart ROS Kinetic 설치에 관한 WIKI 자료 Systems SW § ROS 설치 – http: //wiki. ros. org/kinetic/Installation/Ubuntu § ROS 환경 설정 – http: //wiki. ros. org/ROS/Tutorials/Installingand. Configuri ng. ROSEnvironment 스마트시스템소프트웨어학과
Smart ROS Kinetic 설치 Systems SW 1. NTP(Network Time Protocol) 설정 -터미널을 열고 아래의 command를 입력한다. ## sudo apt-get install –y chrony ntpdate ## sudo ntpdate –q ntp. ubuntu. com 2. Setup sources. list ## sudo sh -c 'echo "deb http: //packages. ros. org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources. list. d/ros-latest. list' 3. Set up keys ## sudo apt-key adv --keyserver hkp: //ha. pool. skskeyservers. net: 80 --recv-key 421 C 365 BD 9 FF 1 F 717815 A 3895523 BAEEB 01 FA 116 스마트시스템소프트웨어학과
Smart ROS Kinetic 설치 Systems SW 4. 패키지 인덱스 업데이트 및 Kinetic Kame 설치 ## sudo apt-get update && sudo-get upgrade -y ## sudo apt-get install ros-kinetic-desktop-full 5. RQT 관련 모든 패키지 설치 ## sudo apt-get install ros-kinetic-rqt* 6. Initialize rosdep - ros를 사용하기전에 rosdep 를 초기화 해주어야만 한다. rosdep 는 ros의 핵심 컴포넌트 들을 사용하거나 컴파일 할 때 의존성 패키지를 쉽게 설치하여 사용자 편의성을 높인 기능이다. ## sudo rosdep init ## rosdep update 스마트시스템소프트웨어학과
Smart ROS Kinetic 설치 Systems SW 6. rosinstall 설치 ## sudo apt-get install python-rosinstall 7. setup Environment ## source /opt/ros/kinetic/setup. bash 위의 커맨드를 입력하고 vi ~/. bashrc로 환경설정 파일을 열었을 때 아래의 115번 line과 같이 입력된것을 확인한다. (파일을 열어 서 수정하는것도 ok) source /opt/ros/kinetic/setup. bash 스마트시스템소프트웨어학과
Smart ROS Hello. World Systems SW 5) 소스 코드 작성 ## cd ~/catkin_ws/src/my_first_ros_pkg/src ## vi hello_world_node. cpp 스마트시스템소프트웨어학과
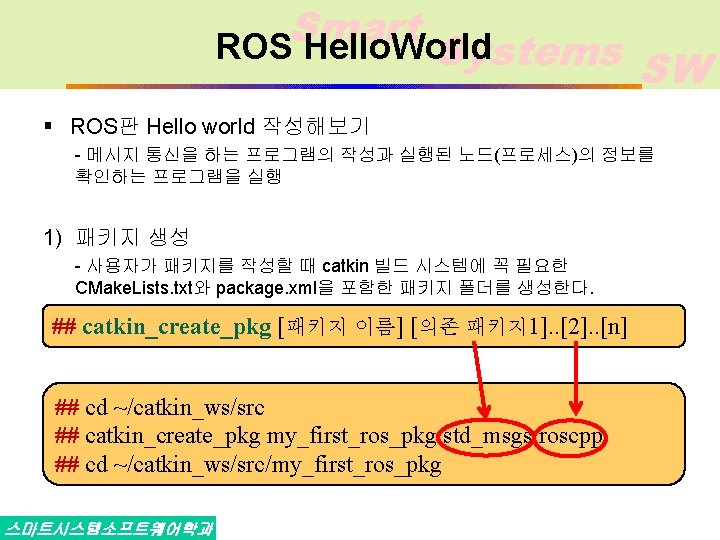
6) 패키지 빌드 Smart ROS Hello. World Systems SW ## cd ~/catkin_ws ## catkin_make 7) roscore 실행 ## roscore (마스터 노드 실행) 8) 노드 실행 (rosrun [패키지명] [프로그램명]) ## rospack profile (혹은 source ~/catkin_ws/devel/setup. bash) ## rosrun my_first_ros_pkg hello_world_node 스마트시스템소프트웨어학과
Smart ROS Hello. World Systems SW § rqt_graph 패키지 ## rosrun rqt_graph § rostopic 명령어 ## rostopic list ## rostopic info /say_hello_world 스마트시스템소프트웨어학과 ## rostopic hz /say_hello_world
Smart ROS Hello. World Systems SW § rqt_topic ## rosrun rqt_topic § 송/수신 테스트 ## rostopic echo /say_hello_world 스마트시스템소프트웨어학과 ## rosrun rqt_graph