Sistem Kontrol 8 Review Transfer Fungsi Diagram Blok

Sistem Kontrol – 8 Review, Transfer Fungsi, Diagram Blok, Dasar Sis. Kon Dimas Firmanda Al Riza, ST, M. Sc
 • • • Pendahuluan Sistem Kontrol Pemodelan Matematik Transformasi Laplace")
Materi sebelum UTS (BDA) • • • Pendahuluan Sistem Kontrol Pemodelan Matematik Transformasi Laplace Fungsi Transfer Perilaku Dinamik Sistem Orde 1 dan 2 Respon Sistem

Materi setelah UTS DFA – Materi 8 • Review ▫ ▫ ▫ Dasar sistem kontrol Pemodelan matematika Transformasi laplace Fungsi transfer Perilaku dinamik sistem orde pertama dan kedua Respon dinamik sistem orde pertama dan kedua ▫ ▫ Karakteristik sistem kontrol umpan balik Contoh sistem kontrol umpan balik Instrumentasi sistem kontrol Beberapa karakteristik sistem kontrol umpan balik • Karakteristik respon dinamik sistem orde yang lebih tinggi (Teori Poles dan Zero) • Sistem Kontrol Feedback

Materi setelah UTS DFA – Materi 9 • Analisa Kestabilan ▫ Kriteria kestabilan umum ▫ Kriteria kestabilan Routh-Hurwitz ▫ Metode substitusi langsung • Perancangan Sistem Kontrol dengan Metode Root. Locus ▫ Dasar teori diagram Root-Locus (Tempat kedudukan akar) ▫ Plot Root-Locus dengan Matlab • Perancangan Kompensator ▫ Kompensator Phase-Lead ▫ Kompensator Phase-Lag ▫ Kompensator Lag-Lead

Materi setelah UTS DFA – Materi 10 • Perancangan Sistem Kontrol dengan Metode Root-Locus ▫ Dasar teori diagram Root-Locus (Tempat kedudukan akar) ▫ Plot Root-Locus dengan Matlab ▫ Kompensasi Lead, Lag, Lead-Lag ▫ Perancangan Kontroller PID

Materi setelah UTS DFA – Materi 11 • Perancangan Sistem Kontrol dengan Metode Respon -Frekuensi ▫ ▫ Diagram Bode Plot Kutub Kriteria kestabilan Nyquist Kompensasi Lead, Lag, Lead-Lag ▫ ▫ ▫ Pengenalan Ziegler-Nichols Rules untuk tuning kontroler PID Kriteria kestabilan Nyquist Kompensasi Lead, Lag, Lead-Lag Desain PID dengan pendekatan respon frekuensi • Kontroler PID dan Modifikasi

Materi setelah UTS YHD – Materi 12, 13, 14 • Pemodelan dengan menggunakan data kuantitatif Neural Network • Teorema Fuzzy • Kontrol Fuzzy

Pustaka 1. Dale E. Seborg et al. , “Process Dynamics and Control”, Wiley Series in Chemical Engineering 2. Katsuhiko Ogata, “Modern Control Engineering”, 5 th Ed, Pearson

UTS

Materi 8 REVIEW: Definition • Controlled Variable/Control Signal/Manipulated Variable: Quantity or condition that is measured and controlled • Plants: Alat atau mesin yang berfungsi untuk melakukan suatu operasi, objek fisik yang di kontrol • Processes Operasi yang dikontrol (Kimia, Fisika, Biologi, dll) • Systems Kombinasi komponen yang bekerja bersama untuk mencapai tujuan tertentu • Disturbances Sinyal yang tidak diinginkan yang mempengaruhi output sistem • Set Point Nilai yang diinginkan dari suatu variabel

Tahapan Desain Sistem Kontrol 1. Menentukan tujuan sistem kontrol 2. Menentukan sistem fisik/plant dan batasannya (input, output, disturbances) 3. Menggambar diagram blok fungsional 4. Membuat model matematika setiap subkomponen dalam sistem kontrol 5. Menggabungkan sub-sistem dan menyederhanakan diagram blok 6. Melakukan teknik analisa dan desain sistem kontrol 7. Menguji model sistem kontrol yang telah dibuat 8. Implementasi

Diagram Blok

Open loop control system

Closed-loop control system

Contoh aplikasi sistem kontrol sederhana: Kontrol temperatur pada proses komposting A B C D

Sistem Kontrol yang lebih kompleks

Hirarki Aktivitas Sistem Kontrol Sistem kontrol Elektronika dan Instrumentasi

Klasifikasi Kontroler Industri 1. 2. 3. 4. 5. 6. 7. Two-position or on-off controllers Proportional controllers Integral controllers PI controllers PD controllers PID controllers Fuzzy Logic controllers

Sistem Kontrol On-Off

Kontroler Proporsional

Kontroler Integral

Sistem Kontrol PI

Sistem Kontrol PD

Sistem Kontrol PID

Pemodelan Matematika • Desain sistem kontrol dapat dilakukan antara lain dengan: ▫ Controller tuning/Ad hoc approach ▫ Model based approach/Analytical ▫ Knowledge based approach (i. e: Fuzzy control, NN) n od er M response analysis of SISO, linear, time invariant system Nyquist Stab. Cri. Bode plot, Root Loc. ▫ State Space (State Variable Model) Optimal CS, Robust CS CS • Model dapat direpresentasikan dalam beberapa bentuk, antara lain: ▫ Transfer Function transient /frequency

Sekilas Pemodelan dalam bentuk state space • Tulis di papan

Konsep dasar Pemodelan dan Fungsi Transfer • Tulis di papan • Mengapa perlu Transformasi Laplace? Agar dapat menyelesaikan model matematika kompleks yang berhubungan dengan persamaan differensial dan integral konvolusi dengan cara perhitungan aljabar biasa setelah dibuat domain Laplace-nya

Partial Fraction Expansion Revisited

Prosedur Umum Penyelesaian ODE dengan Laplace

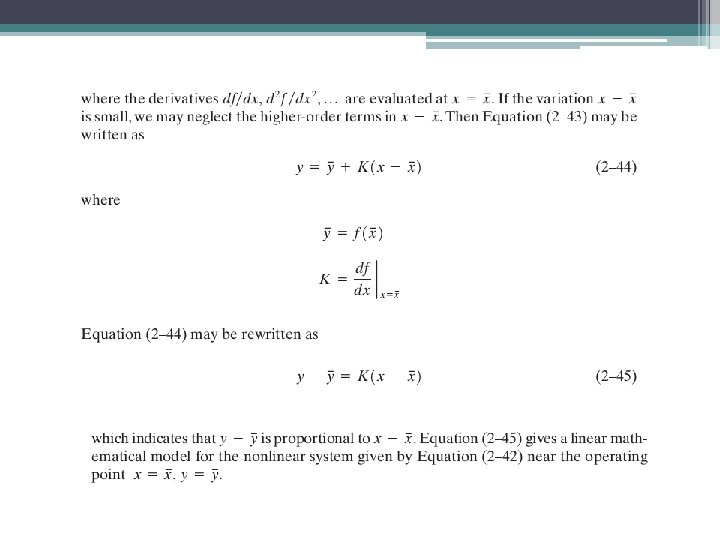
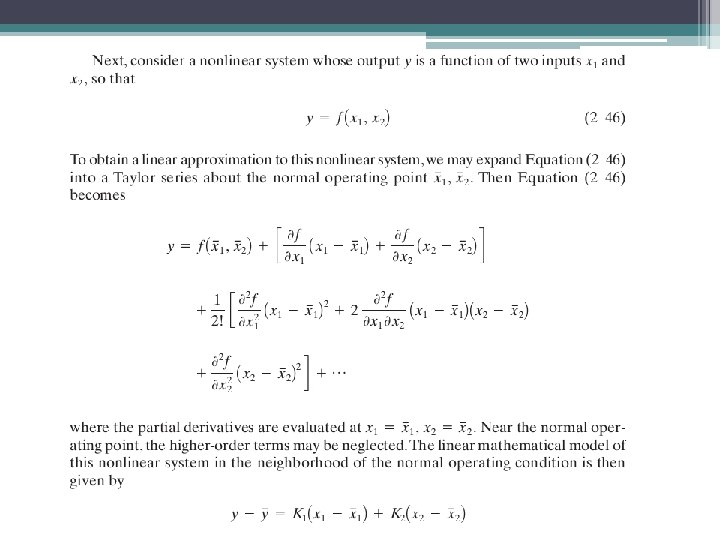
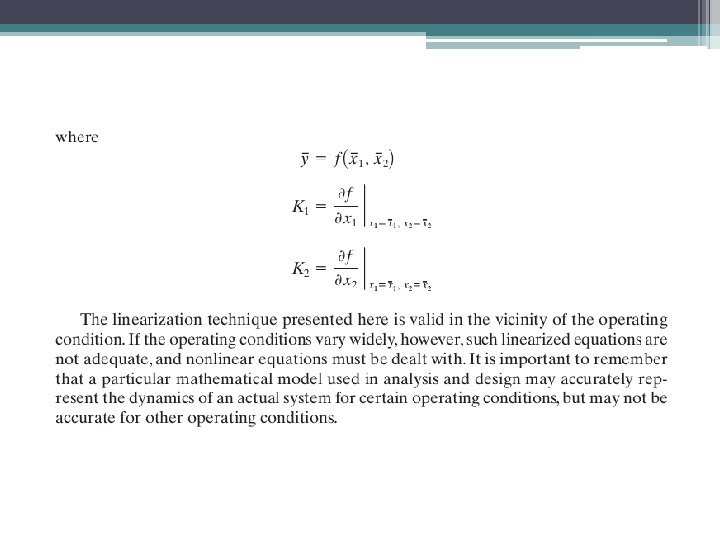
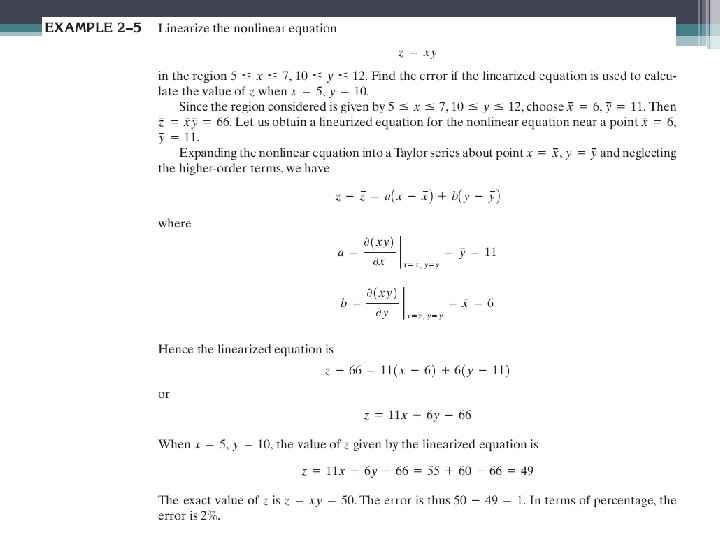
Linearisasi sistem non Linear

Perilaku Dinamik Sistem Orde 1 & 2 • Skip

Karakteristik dinamik sistem orde tinggi • Diagram blok dan penyederhanaannya

Karakteristik sistem kontrol feedback
")
Pengenalan Matlab untuk penyelesaian problem Sistem Kontrol • Reduksi/penyederhanaan fungsi transfer (Matlab=Obtain. TF. m) • Konversi Fungsi transfer ke SS

Thank’s
- Slides: 39