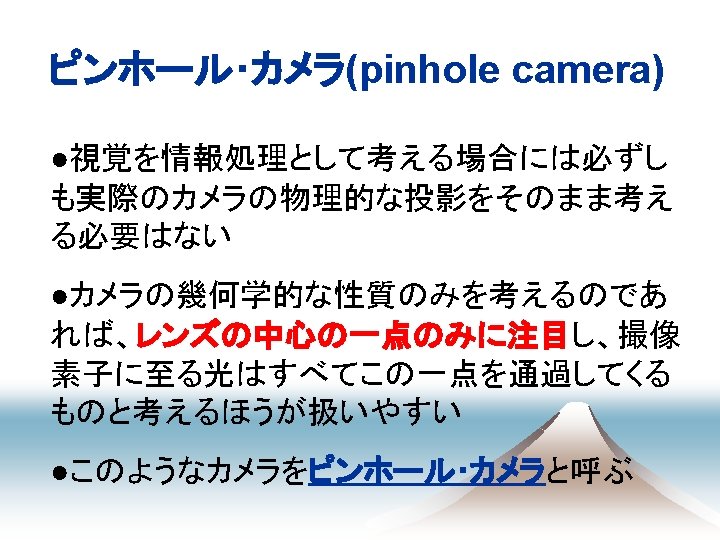
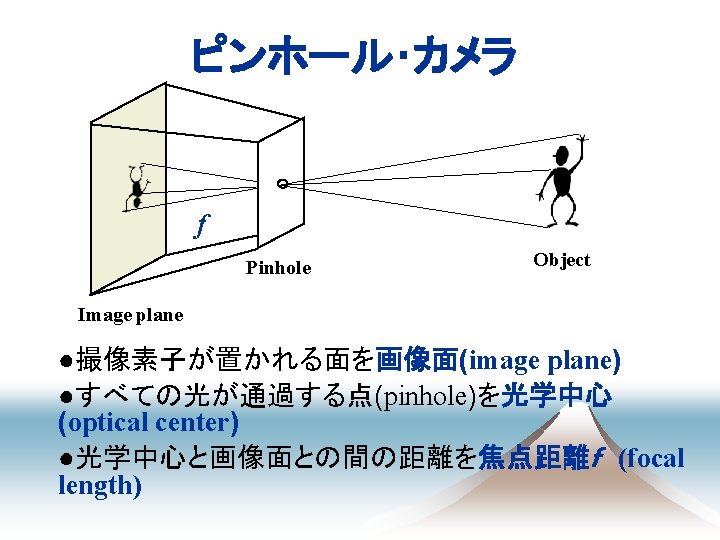
Single view geometry Camera model Single view geom

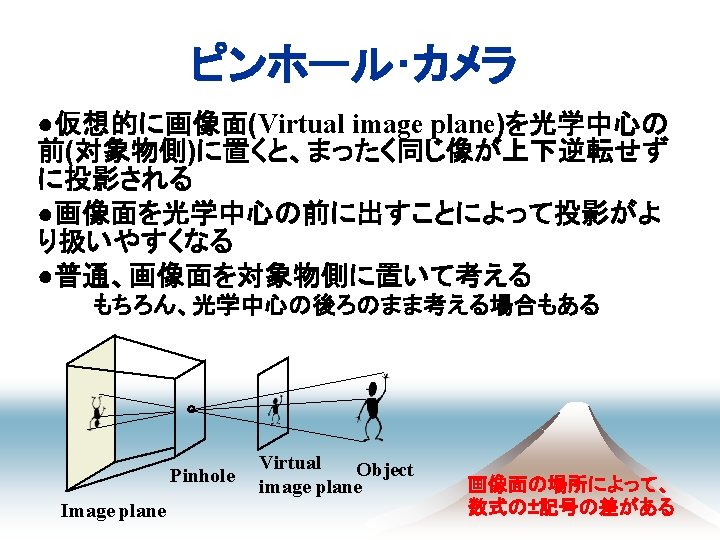







 Pinhole Virtual image plane Image plane 簡略されたモデル: z y y’ O")

 u 画像中心Image center (ox, oy) u")
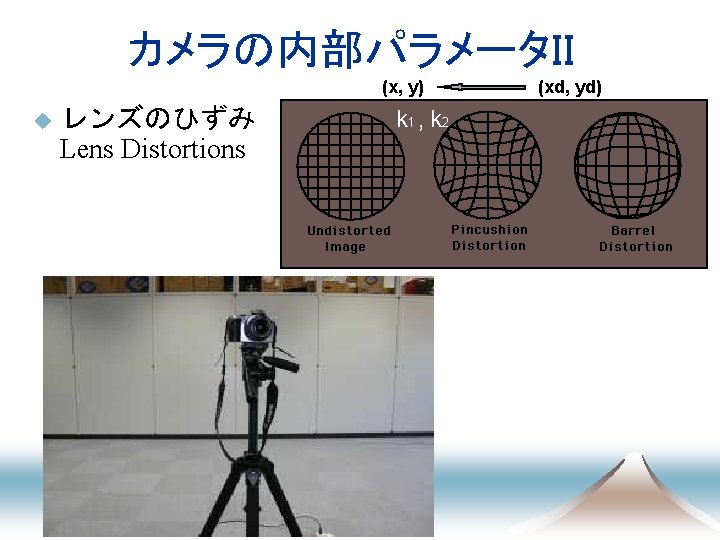
 u u レンズのひずみ Lens Distortions k 1 , k 2 Modeled")
 u (tx, ty, tz) Translation vector")
 u Inverse translation")
 u u Inverse rotation 回転行列は直交行列!!")


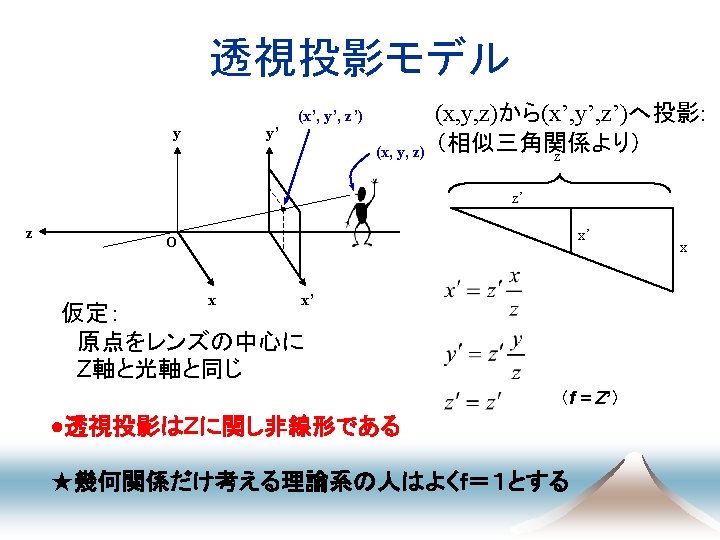
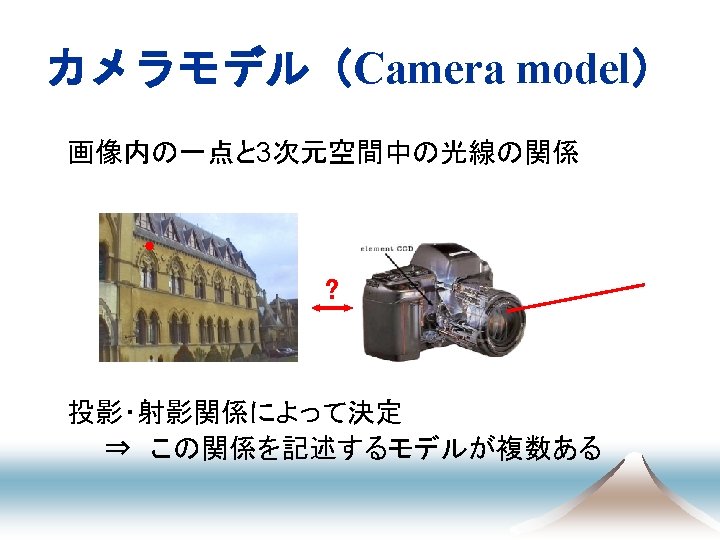
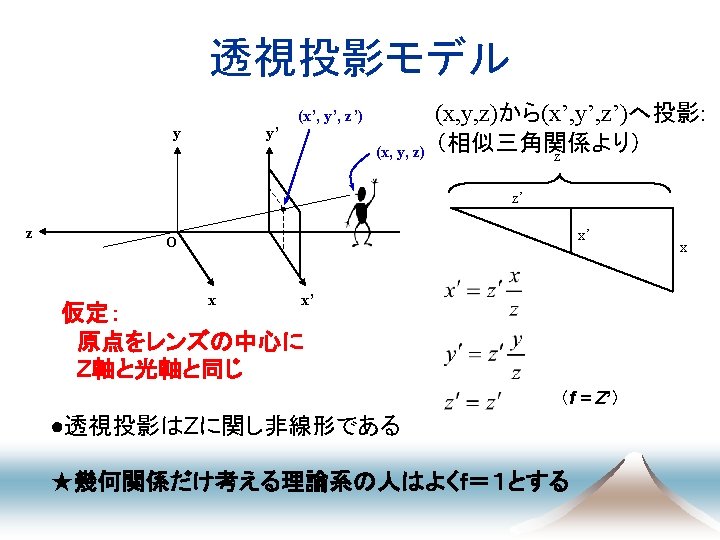
 (x, y, z) z O x Projection from (x,")
- Slides: 41
Single view geometry Camera model Single view geom.
Pinhole camera image Amsterdam: what do you see in this picture? lstraight line lsize lparallelism/angle lshape of planes ldepth Photo by Robert Kosara, robert@kosara. net http: //www. kosara. net/gallery/pinholeamsterda m/pic 01. html
Pinhole camera image Amsterdam üstraight line lsize lparallelism/angle lshape of planes ldepth Photo by Robert Kosara, robert@kosara. net http: //www. kosara. net/gallery/pinholeamsterda m/pic 01. html
Pinhole camera image Amsterdam üstraight line ´size lparallelism/angle lshape of planes ldepth Photo by Robert Kosara, robert@kosara. net http: //www. kosara. net/gallery/pinholeamsterda m/pic 01. html
Pinhole camera image Amsterdam üstraight line ´size ´parallelism/angle lshape of planes ldepth Photo by Robert Kosara, robert@kosara. net http: //www. kosara. net/gallery/pinholeamsterda m/pic 01. html
Pinhole camera image Amsterdam üstraight line ´size ´parallelism/angle ´shape lshape of planes ldepth Photo by Robert Kosara, robert@kosara. net http: //www. kosara. net/gallery/pinholeamsterda m/pic 01. html
Pinhole camera image Amsterdam üstraight line ´size ´parallelism/angle ´shape lshape ü of planes parallel to image ldepth Photo by Robert Kosara, robert@kosara. net http: //www. kosara. net/gallery/pinholeamsterda m/pic 01. html
Pinhole camera image Amsterdam: what do you see? üstraight line ´size ´parallelism/angle ´shape lshape ü of planes parallel to image l. Depth ? lstereo - We see spatial shapes rather than individual pixels lmotion lsize lstructure … - Knowledge: top-down vision belongs to human - Stereo & Motion most successful in 3 D CV & application - You can see it but you don't know how…
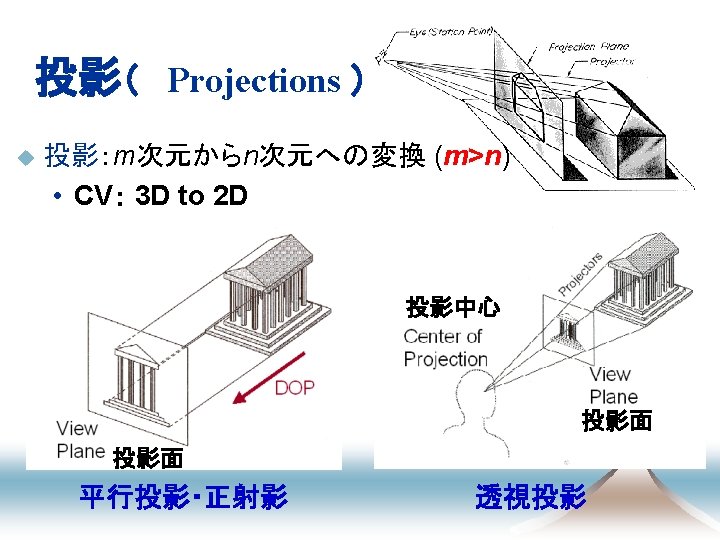
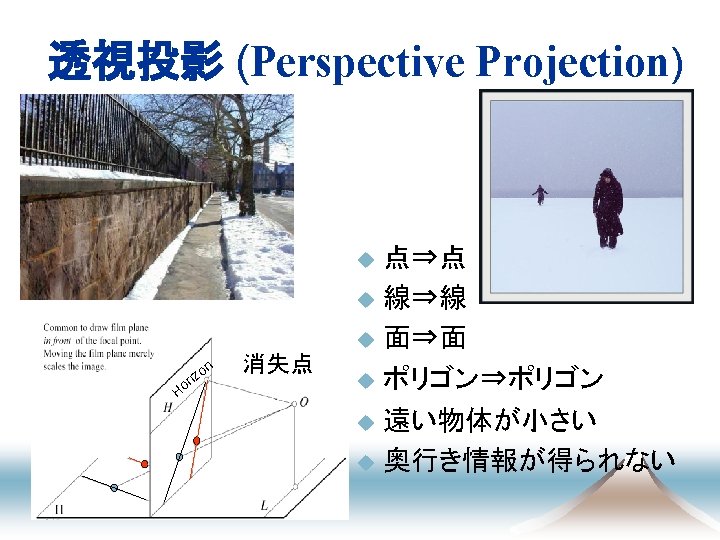
透視投影 (Perspective Projection) Pinhole Virtual image plane Image plane 簡略されたモデル: z y y’ O x x’ Object
同次座標系 Homogenous Coordinates
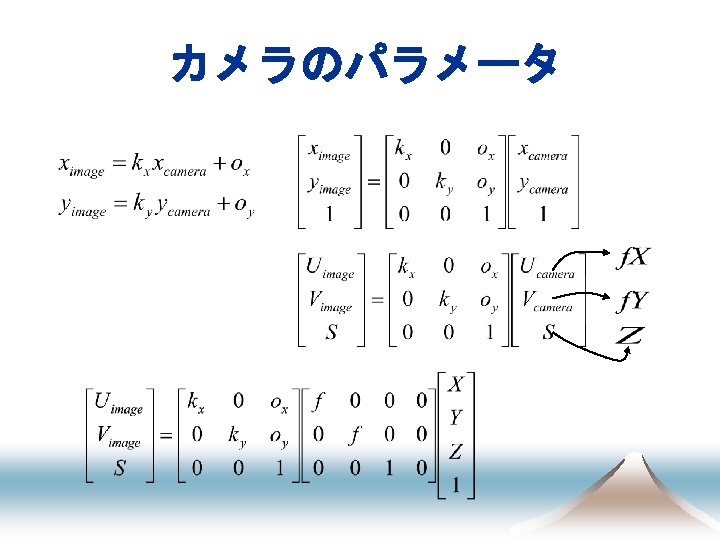
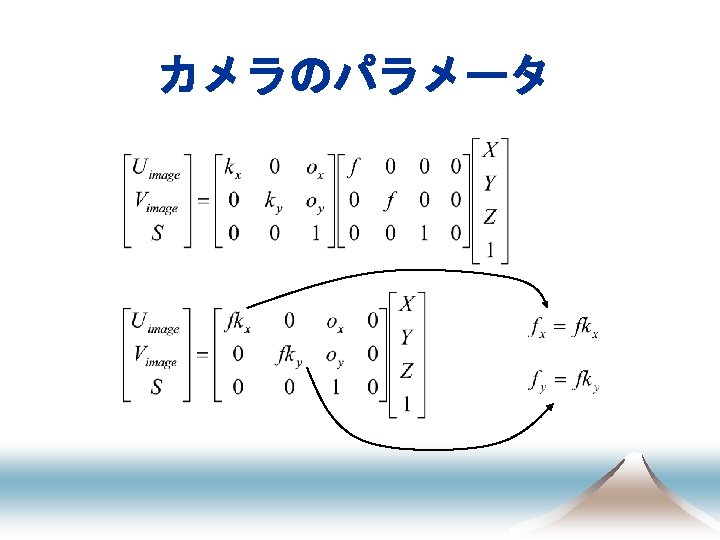
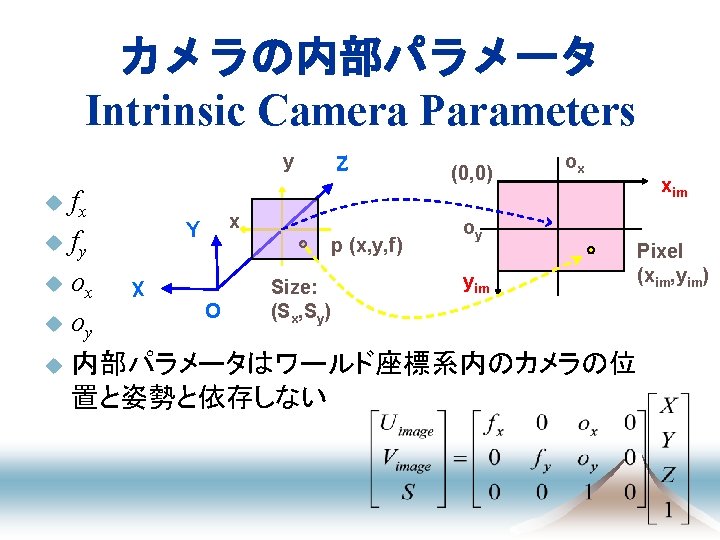
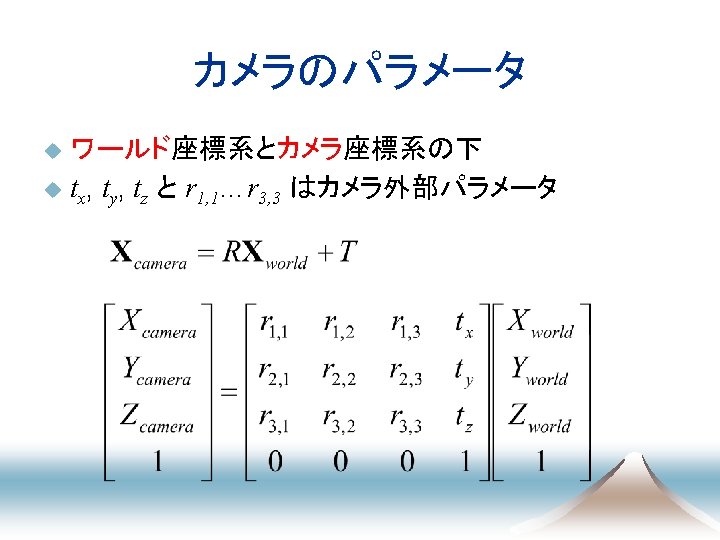
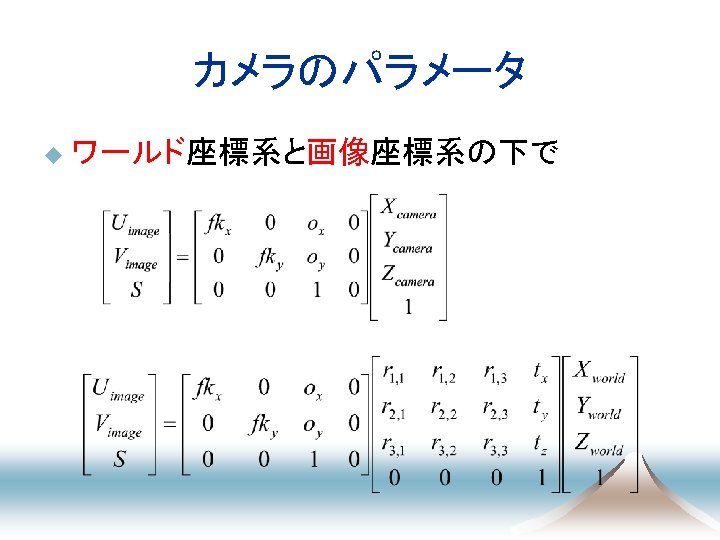
カメラのパラメータ Camera Parameters u 画像座標系Image coordinates (ximage, yimage) u 画像中心Image center (ox, oy) u カメラ座標系Camera coordinates (xcamera, ycamera) u u u ワールド座標系Real world coordinates (X, Y, Z) 焦点距離Focal length f 画素の有効サイズEffective size of pixel in millimeter
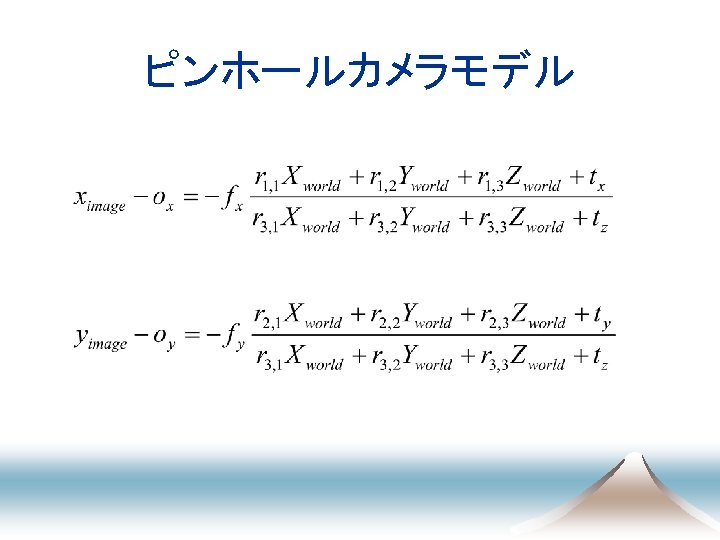
カメラの内部パラメータII (x, y) u u レンズのひずみ Lens Distortions k 1 , k 2 Modeled as simple radial distortions • r 2 = xd 2+yd 2 • (xd , yd) distorted points • k 1 , k 2: distortion coefficients • A model with k 2 =0 is still accurate for a CCD sensor of 500 x 500 with ~5 pixels distortion on the outer boundary (xd, yd)
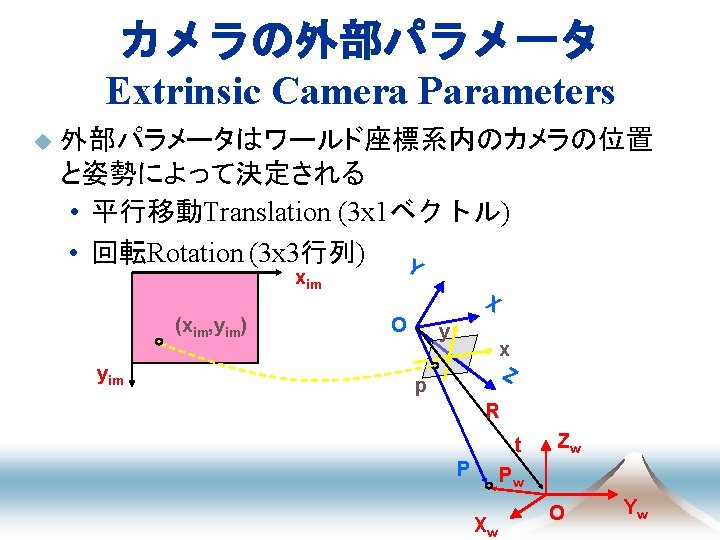
平行移動(Translation) u (tx, ty, tz) Translation vector
平行移動(Translation) u Inverse translation
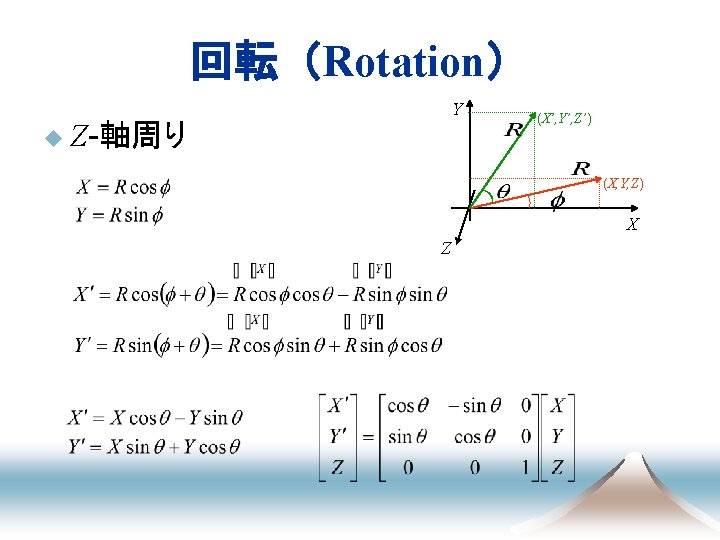
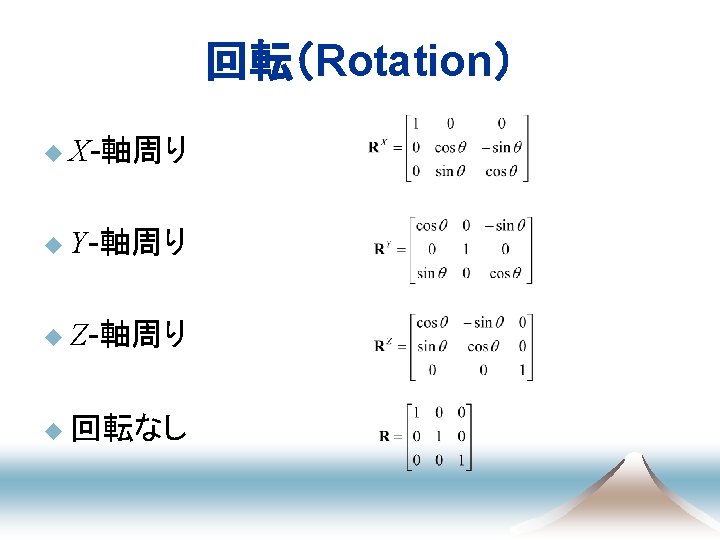
回転(Rotation) u u Inverse rotation 回転行列は直交行列!!
回転行列とEuler角 u u u 回転行列: 3 x 3 • 直交行列Orthogonal : , • 9 elements => 3+3 constraints (orthogonal) => 2+2 constraints (unit vectors) => 3 DOF 自由度 (degrees of freedom) Y , はX, Y, Z軸周りの回転角 X O 注意: Z a Zw • 一回一つの角度しか回転できない • 順番と関係がある Xw b Yw g
回転行列とEuler角 u If angle is small, then cos =1 and sin = また * + = Y O X Z a Zw Xw b Yw g
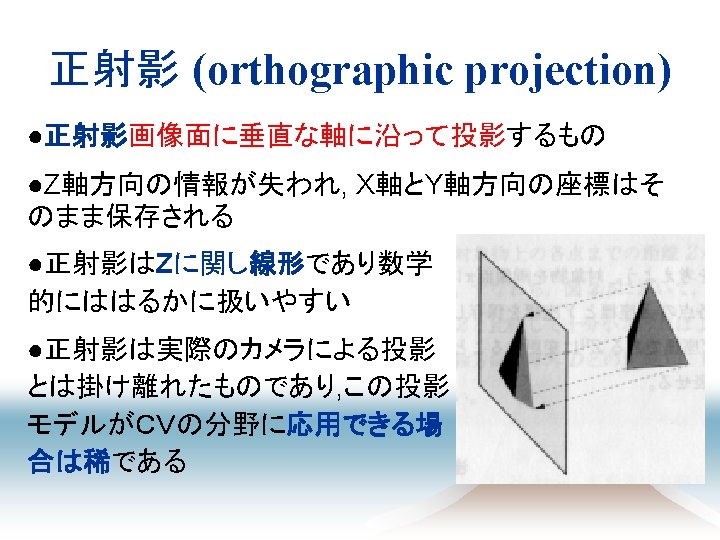
正射影モデル y (x’, y’, z’) (x, y, z) z O x Projection from (x, y, z) to (x’, y’, z’): or