SIMULATION SOFTWARE ENGINEERING 1 Simulation X Copyright ITI







: 传递函数 Copyright ITI Gmb.")





: 传递函数 Copyright ITI Gmb. H")
 ENGINEERING x(t) x(k. T) t 原始信号 t 采样信号 |X( jω)|")
 ENGINEERING 混淆现象问题 实例: 解决方案: Copyright ITI Gmb. H 2007 •")
 ENGINEERING x(k. T) x(k) x(t) k 离散时间信号 t 阶梯信号 |X(e")




- Slides: 52
SIMULATION SOFTWARE ENGINEERING 1. Simulation. X中的控制系统 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 2
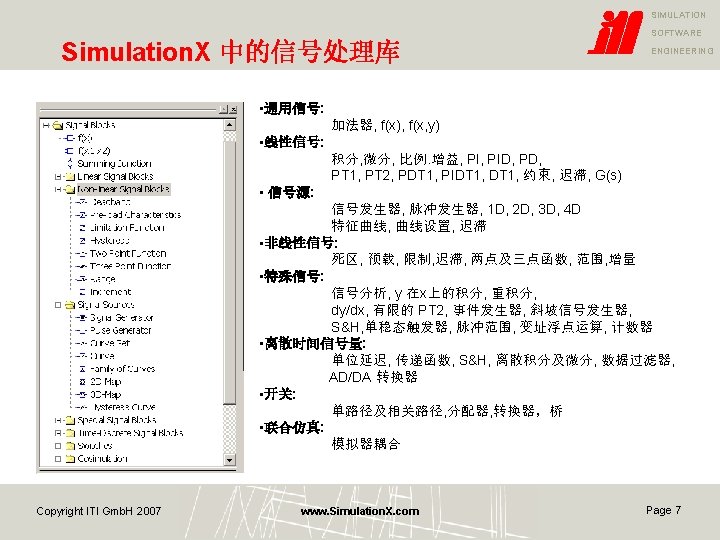
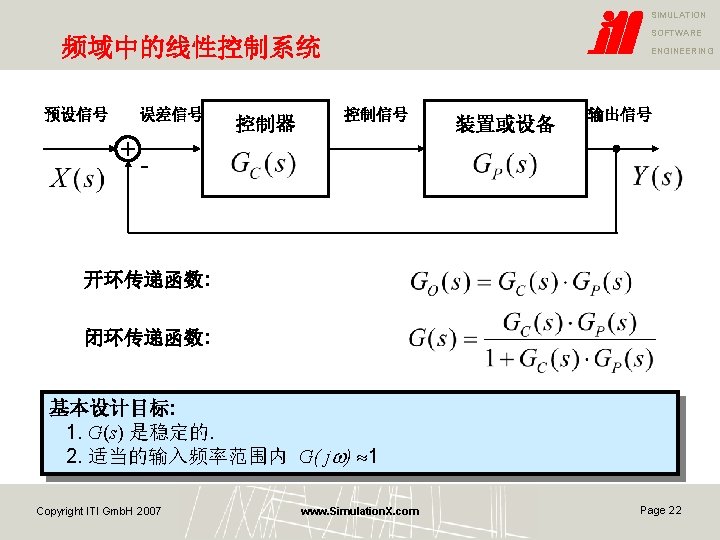
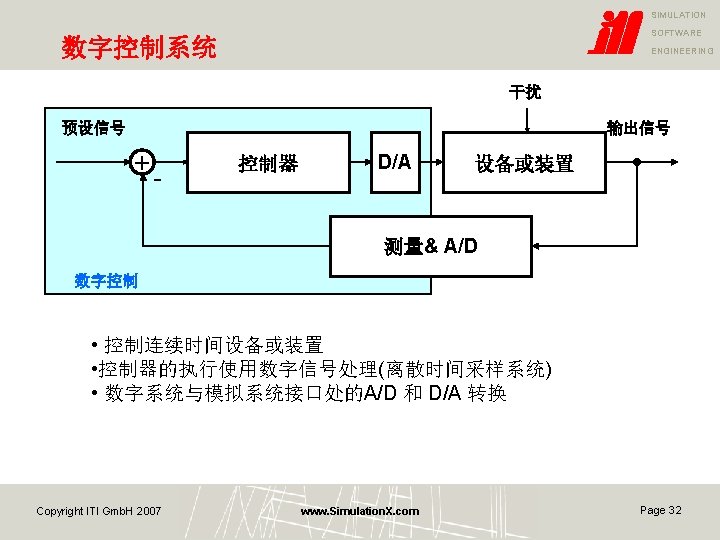
SIMULATION Simulation. X中控制系统的建模 SOFTWARE ENGINEERING 被控设备是一种物理装置 使用 Simulation. X中的物理库建模 控制理论使用信号模型 使用Simulation. X中的信号库建模 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 6
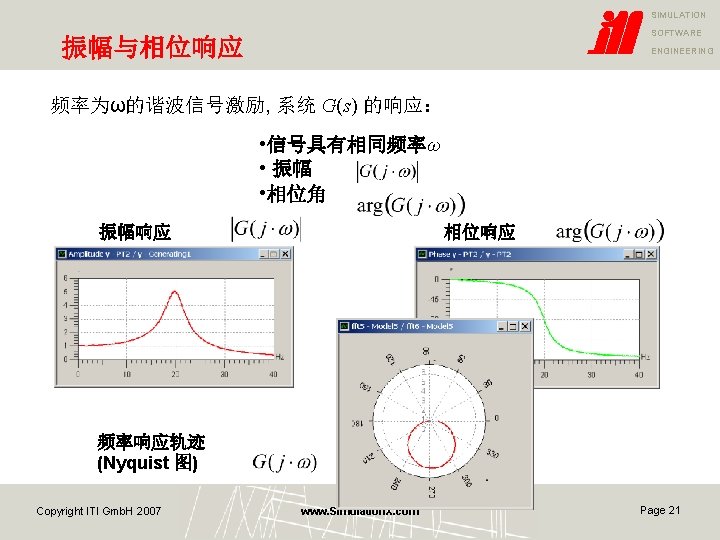
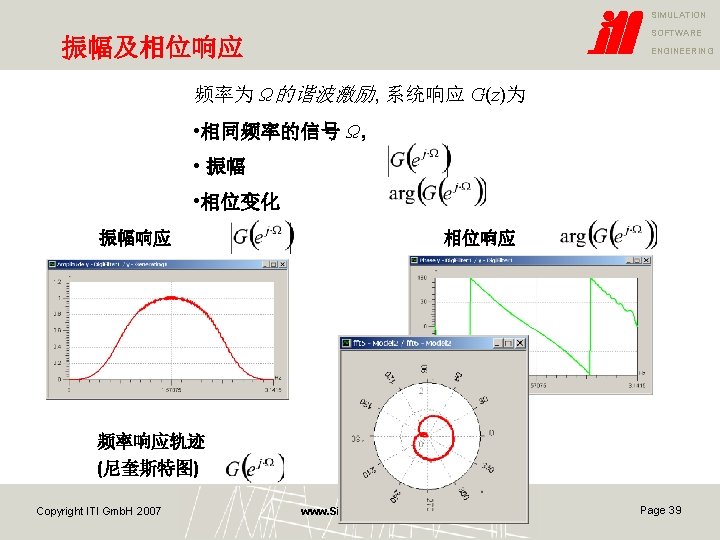
SIMULATION SOFTWARE Simulation. X中控制系统的设计及分析 • 振幅及相位响应 • 信号谱 • 特征频率, 特征向量, 偏差 Copyright ITI Gmb. H 2007 ENGINEERING www. Simulation. X. com • 优化 Page 8
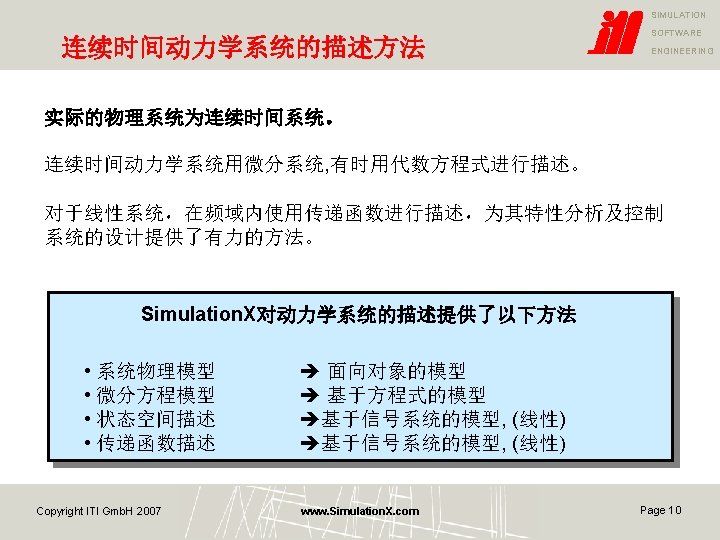
SIMULATION SOFTWARE ENGINEERING 2. 连续时间控制系统 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 9
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 物理模型 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 11
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 微分方程模型 电路: 电—机械连接: 机械系统: 微分方程系统: Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 12
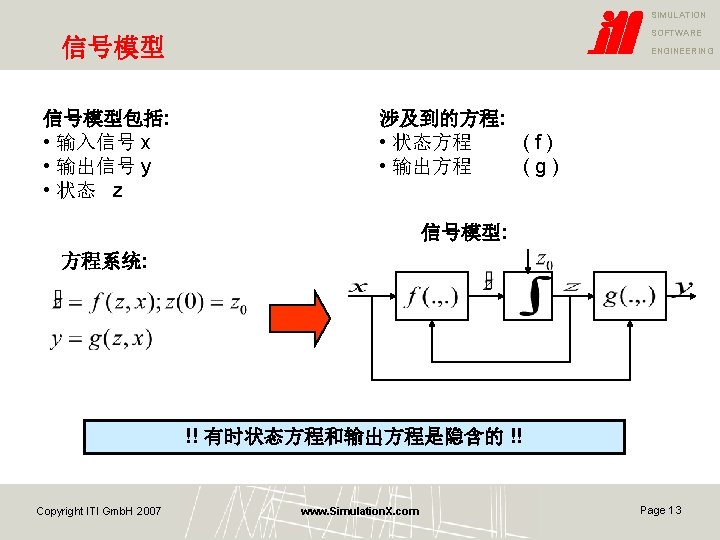
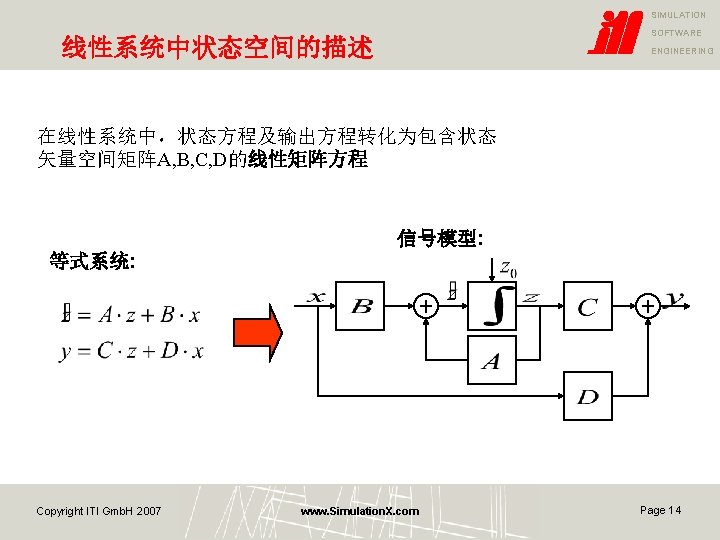
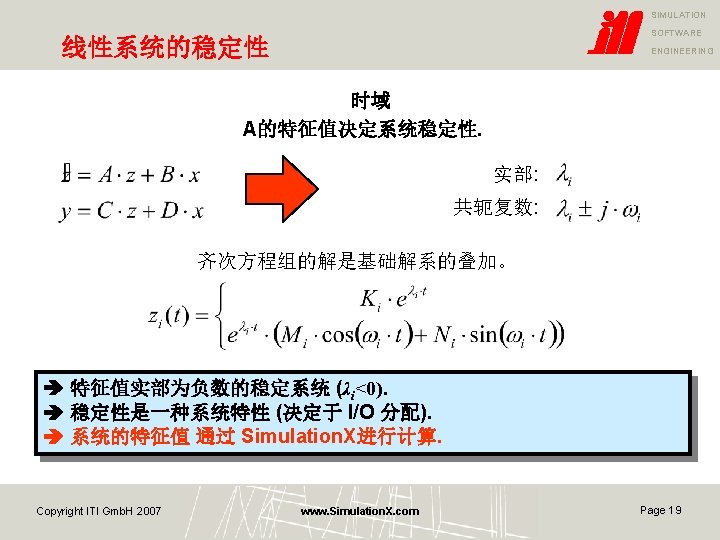
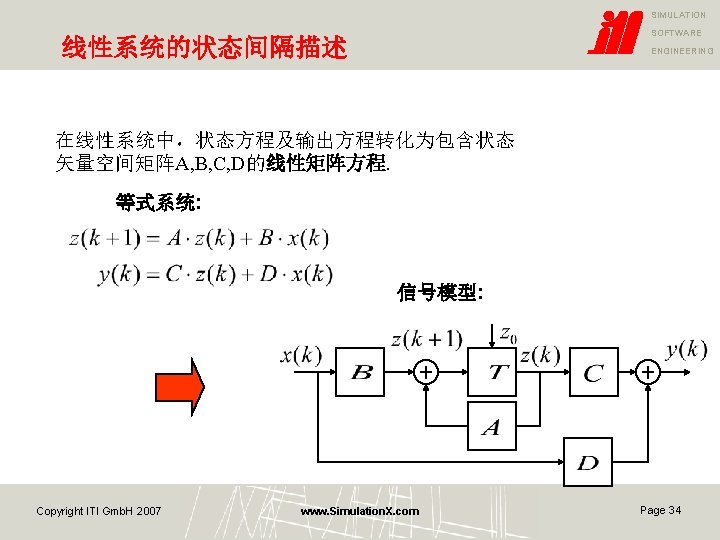
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 状态空间模型 // 状态空间矩阵 A: ={{-R/L, -k. U/L}, {k. T/J, 0}}; B: ={1/L, 0}; C: ={0, 1}; D: ={0}; // 状态方程 der(z) = A*z + B*x; // 输出方程 y = C*z + D*x; Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 15
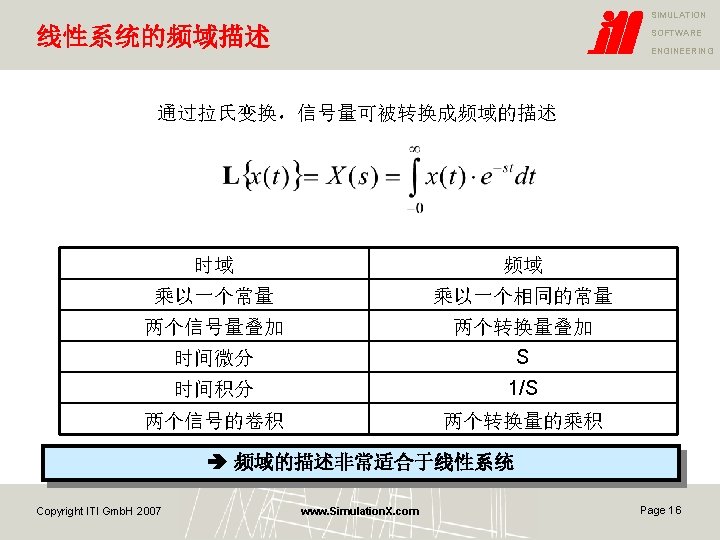
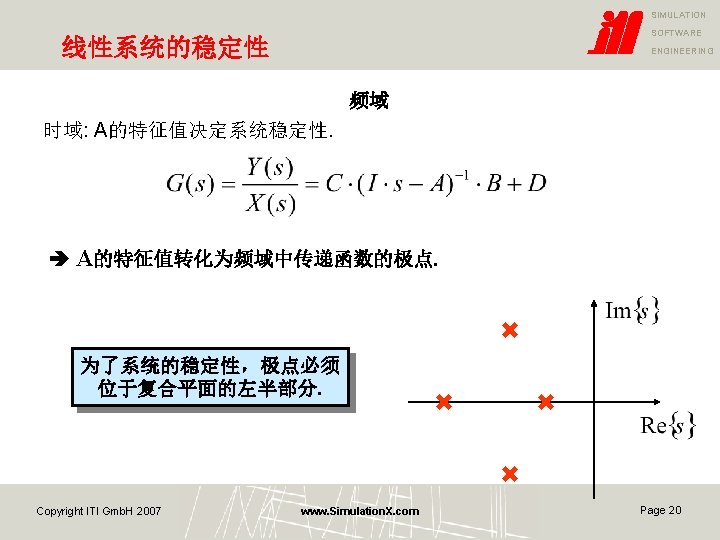
SIMULATION SOFTWARE 线性系统的频域陈述 ENGINEERING 时域 频域 I/O 特性可在频域中明确表示 (消除 Z): 传递函数 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 17
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 传递函数 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 18
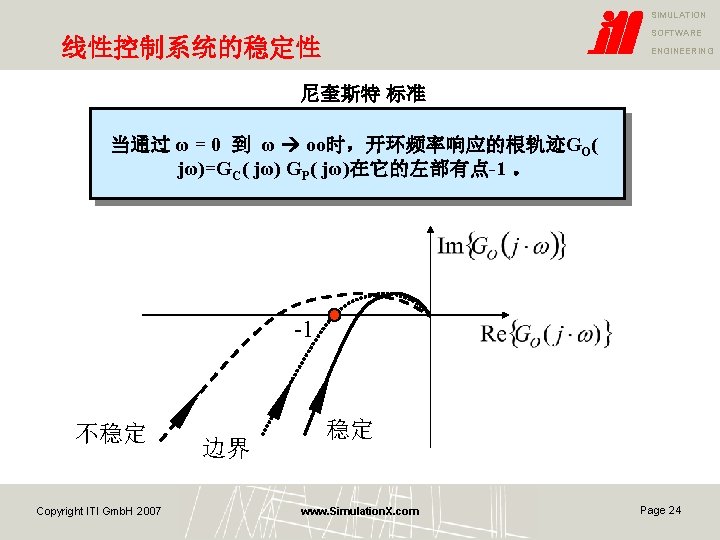
SIMULATION SOFTWARE 线性控制系统的稳定性 ENGINEERING 振幅及相位差 0 -1 0 测量与临界点 -1的距离. -180 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 25
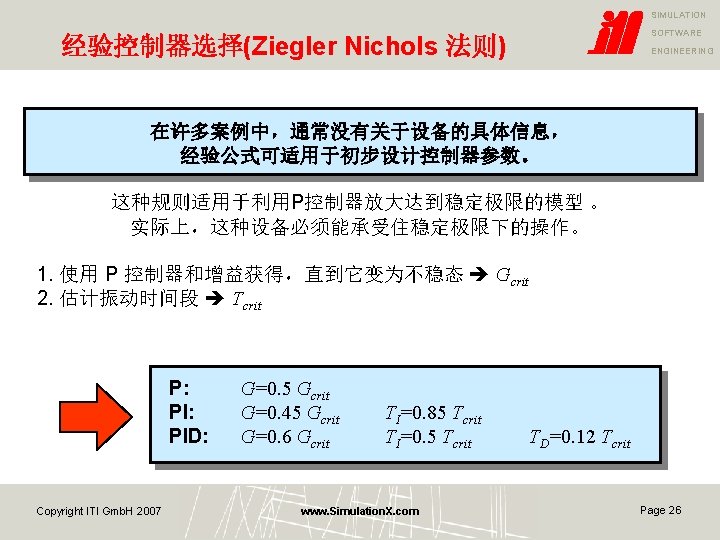
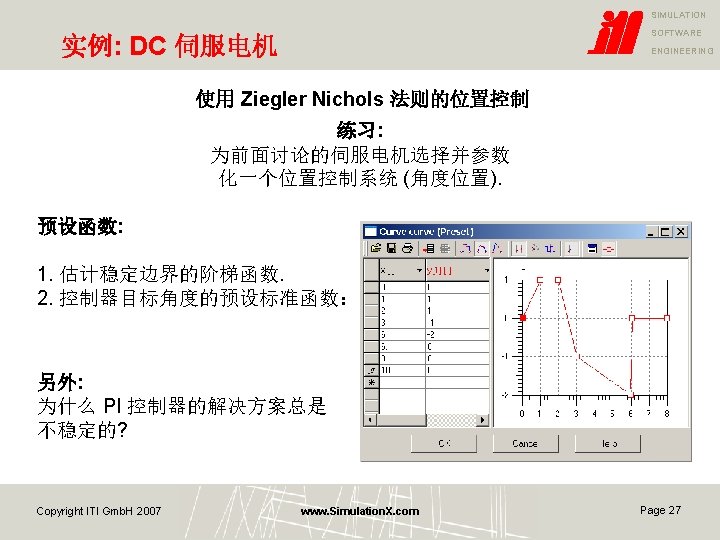
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 使用 Ziegler Nichols 法则的位置控制 解决方案: Gcrit =100, Tcrit =0. 44 s P: GP=0. 5 Gcrit =50 PID: GP=0. 6·Gcrit =60 TI=0. 5·Tcrit =0. 22 s TD=0. 12·Tcrit =0. 053 s P-控制器 Copyright ITI Gmb. H 2007 PID-控制器 www. Simulation. X. com Page 28
SIMULATION SOFTWARE 范例: DC 伺服电机 ENGINEERING 使用 Ziegler Nichols 法则的位置控制 使用 I-控制的稳定性问题: 开环传递函数的根轨迹 G 0虚部 -1 G 0实部 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 30
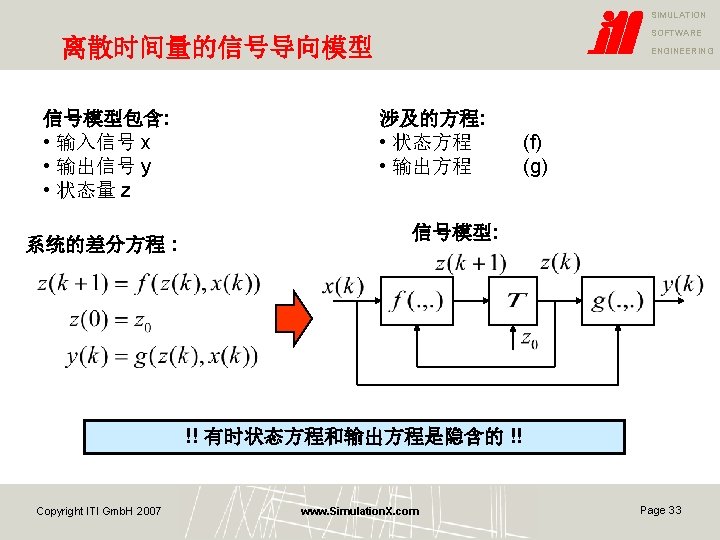
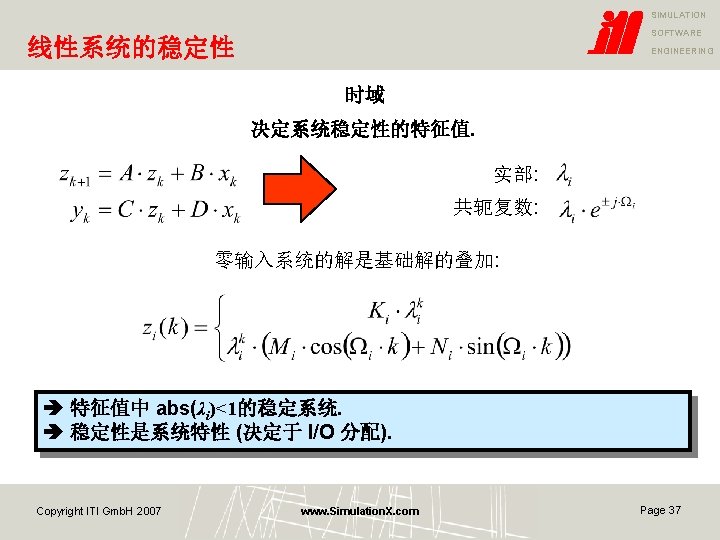
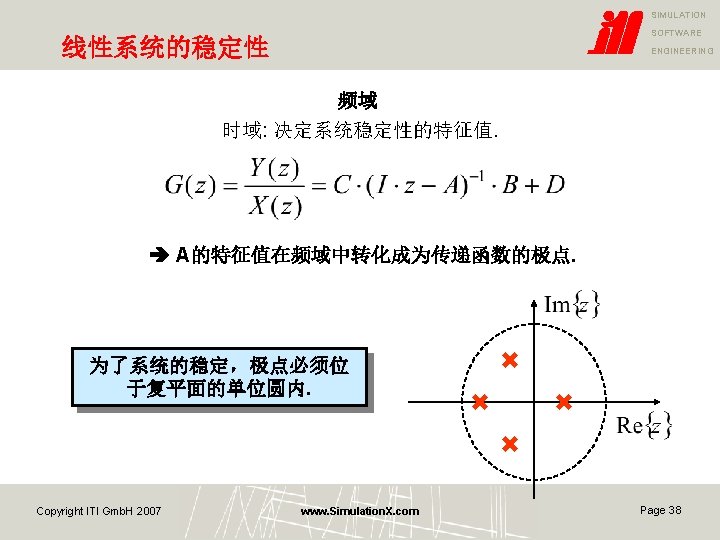
SIMULATION SOFTWARE ENGINEERING 3. 离散时间控制系统 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 31
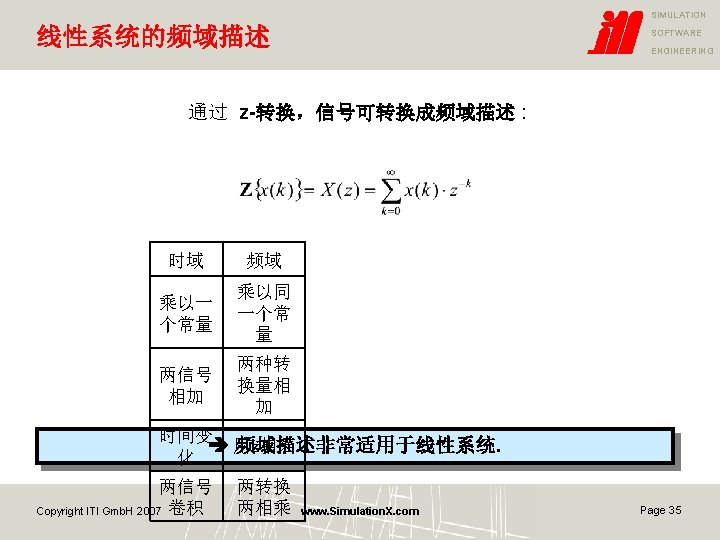
SIMULATION SOFTWARE 线性系统的频域描述 ENGINEERING 时域 频域 I/O行为 可在频域中精确的表达 (消除Z): 传递函数 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 36
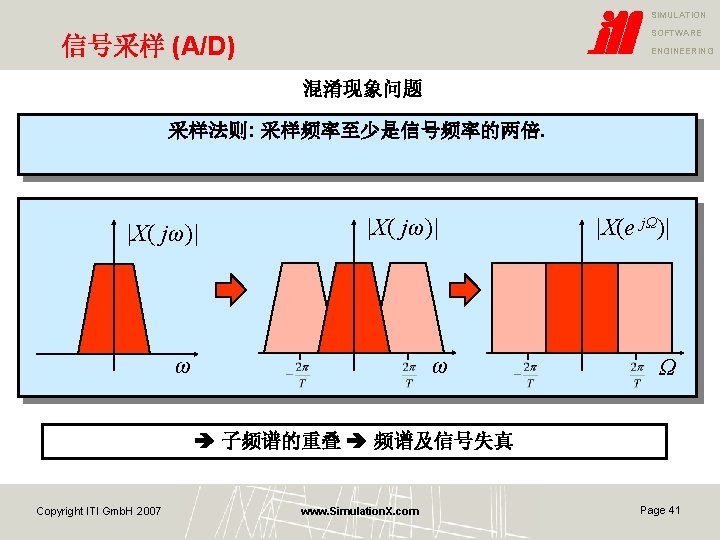
SIMULATION SOFTWARE 信号采样 (A/D) ENGINEERING x(t) x(k. T) t 原始信号 t 采样信号 |X( jω)| ω www. Simulation. X. com k 离散时间信号 |X( jω)| ω Copyright ITI Gmb. H 2007 x(k) |X(e jΩ)| Ω Page 40
SIMULATION SOFTWARE 信号采样 (A/D) ENGINEERING 混淆现象问题 实例: 解决方案: Copyright ITI Gmb. H 2007 • 适当的采样频率 • 低通滤波器 www. Simulation. X. com Page 42
SIMULATION SOFTWARE 采样信号修整 (D/A) ENGINEERING x(k. T) x(k) x(t) k 离散时间信号 t 阶梯信号 |X(e jΩ)| 修整信号 |X( jω)| 低通 滤波 ω Ω Copyright ITI Gmb. H 2007 www. Simulation. X. com ω Page 43
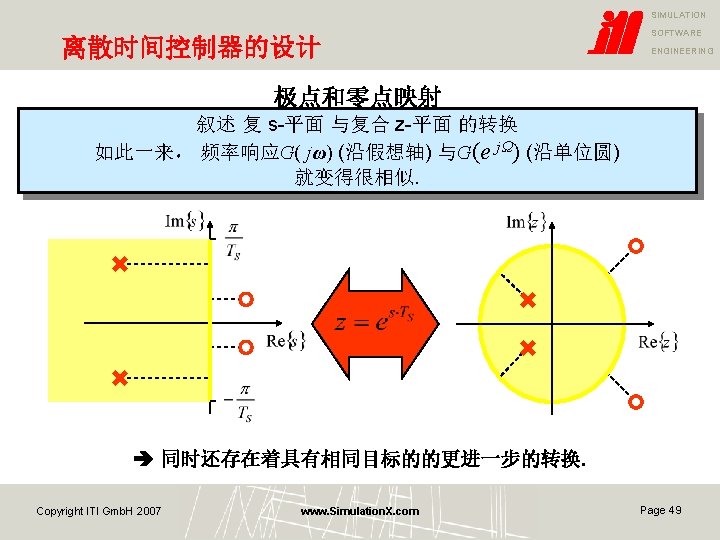
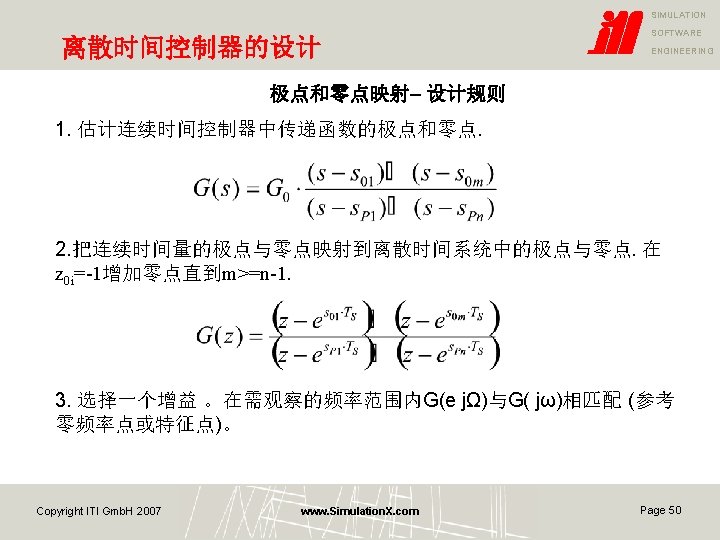
SIMULATION SOFTWARE 离散时间量控制器的设计 ENGINEERING 离散时间量的近似值 连续时间量: Copyright ITI Gmb. H 2007 离散时间量: www. Simulation. X. com Page 45
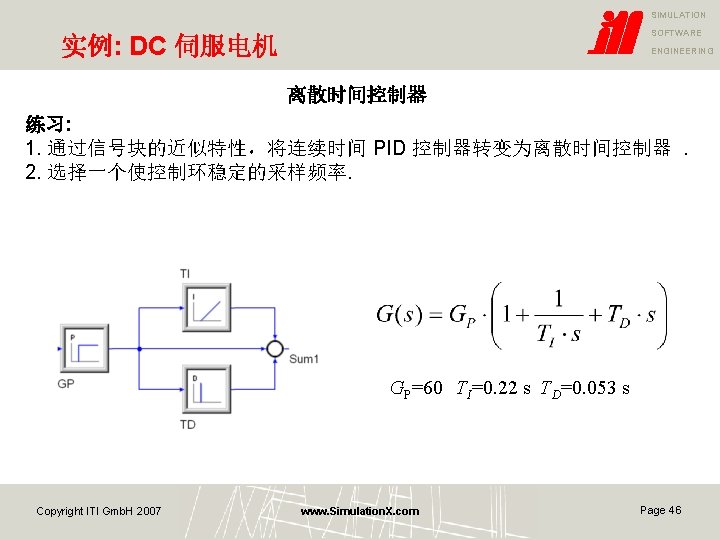
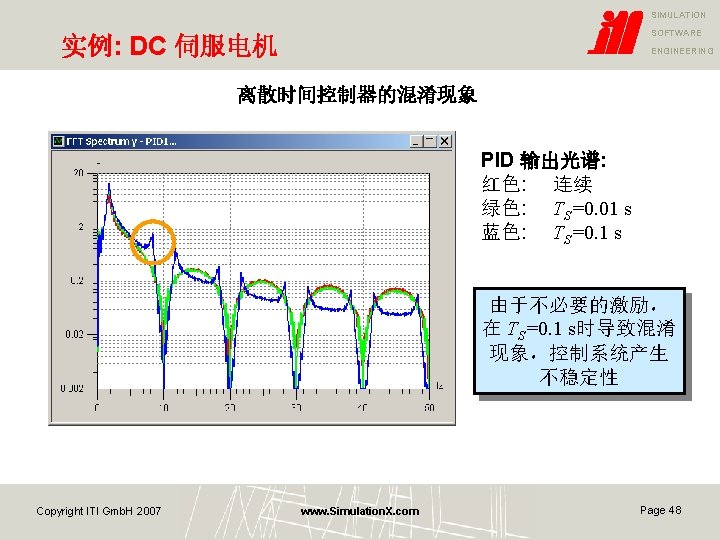
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 离散时间控制器 Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 47
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 基于极点与零点映射的离散时间控制器 PID 控制器: GP=60, TI=0. 22 s, TD=0. 053 s 离散时间传递函数: Copyright ITI Gmb. H 2007 www. Simulation. X. com Page 51
SIMULATION SOFTWARE 实例: DC 伺服电机 ENGINEERING 10000 振幅响应 PID 连续量. PID 离散量. 1000 10 0. 1 Copyright ITI Gmb. H 2007 1 10 Frequency [Hz] Phase Response [°] Amplitude Response 基于极点与零点映射的离散时间控制器 相位响应 200 PID 连续量. PID 离散量. 150 100 50 0 -50 -100 www. Simulation. X. com 0. 1 1 10 Frequency [Hz] Page 52