ShapeStructure From X 2 D 2 5 D
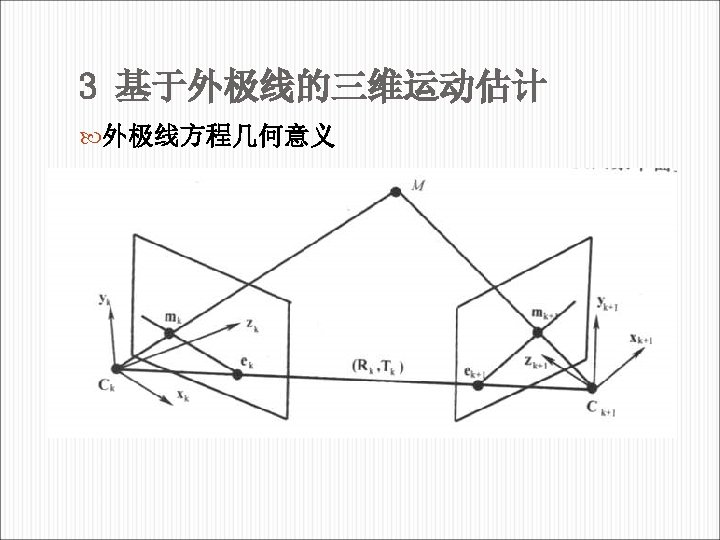
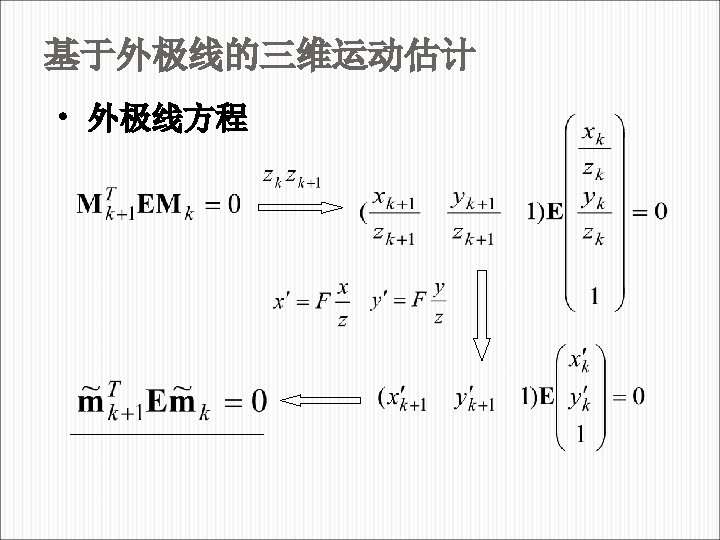
 From X 解决的是从2 D图像到 2. 5 D表面形状(场景深度) 的问题 Shape from motion Shape from")


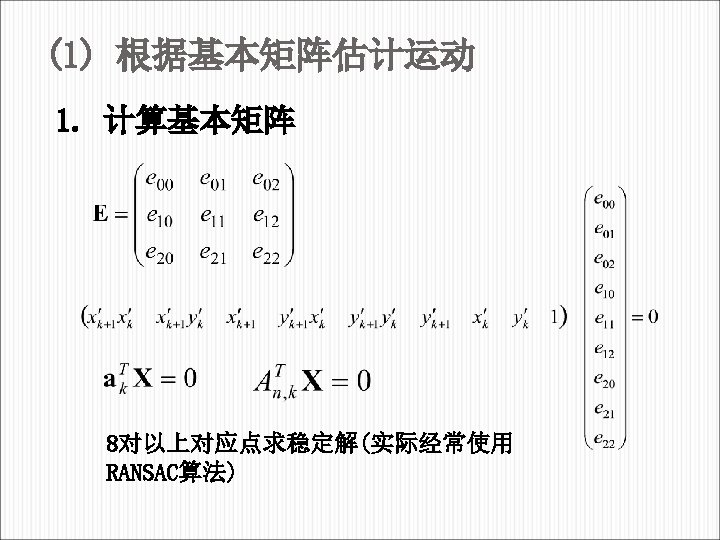
 根据基本矩阵估计运动 1. 计算基本矩阵 In reality, instead of solving to minimize , we seek")

‘.")


![Normalized 8 -point algorithm [x 1, T 1] = normalise 2 dpts(x 1); [x](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-23.jpg "Normalized 8 -point algorithm [x 1, T 1] = normalise 2 dpts(x 1); [x")
![Normalization function [newpts, T] = normalise 2 dpts(pts) c = mean(pts(1: 2, : )')';](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-24.jpg "Normalization function [newpts, T] = normalise 2 dpts(pts) c = mean(pts(1: 2, : )')';")
 compute solution(s) for F determine inliers until")








 • Skew")







 Multi-view Stereo (MVS)")
 Multi-view Stereo (MVS)")


![Two-view Reconstruction keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-51.jpg "Two-view Reconstruction keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation")
![Keypoints Detection keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-52.jpg "Keypoints Detection keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation")
![Descriptor for each point SIFT descriptor keypoints match keypoints fundamental matrix essential matrix [R|t]](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-53.jpg "Descriptor for each point SIFT descriptor keypoints match keypoints fundamental matrix essential matrix [R|t]")

![Point Match for correspondences keypoints match keypoints SIFT descriptor fundamental matrix essential matrix [R|t]](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-55.jpg "Point Match for correspondences keypoints match keypoints SIFT descriptor fundamental matrix essential matrix [R|t]")
![Point Match for correspondences keypoints match keypoints SIFT descriptor fundamental matrix essential matrix [R|t]](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-56.jpg "Point Match for correspondences keypoints match keypoints SIFT descriptor fundamental matrix essential matrix [R|t]")


")





![Two-view Reconstruction keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation](https://slidetodoc.com/presentation_image_h/1f207b9504240a5c3ddc403018d48da2/image-65.jpg "Two-view Reconstruction keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation")
 Multi-view Stereo (MVS)")











 • • • Invariant to linear radiometric changes More")
 • • • Invariant to linear radiometric changes More")

 • Maintain a priority queue Q • Initialize: Put all")

")



- Slides: 86
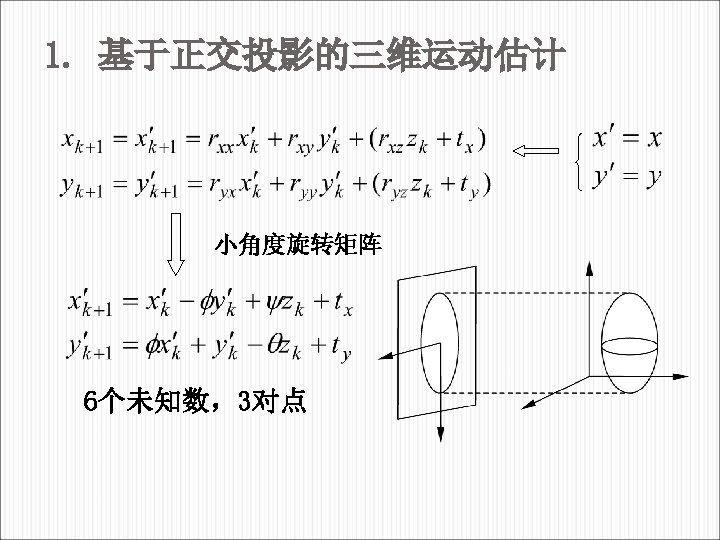
Shape(Structure) From X 解决的是从2 D图像到 2. 5 D表面形状(场景深度) 的问题 Shape from motion Shape from stereo Shape from monocular cues(shading, vanishing point, defocus, texture, …. )
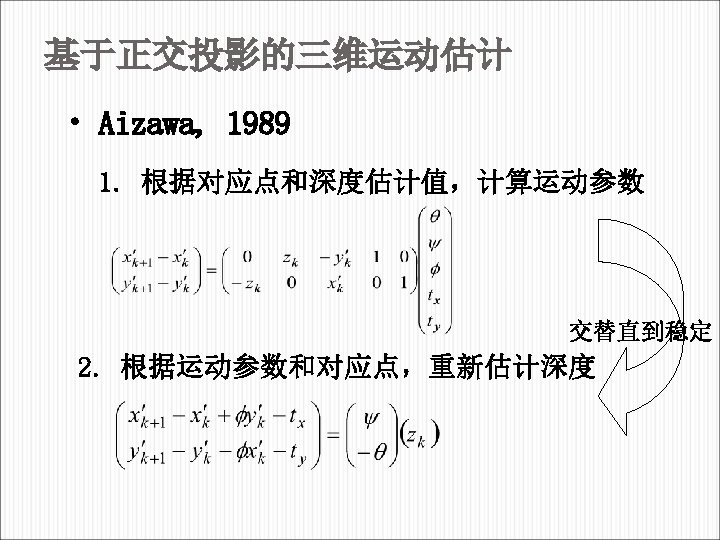
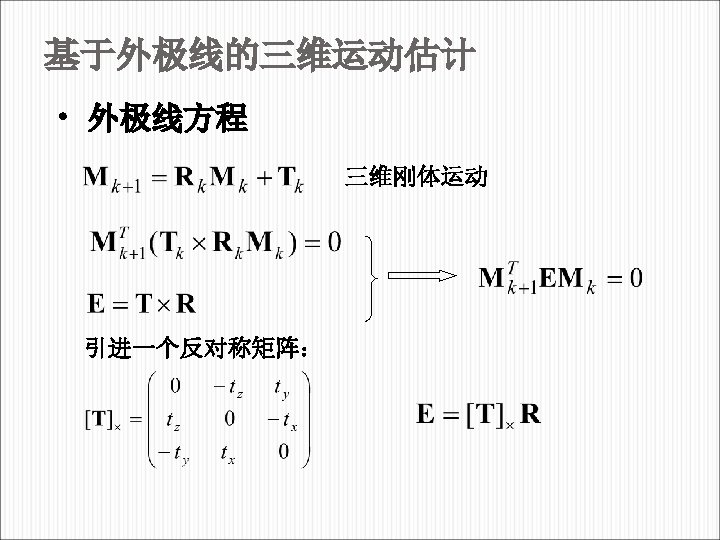
(1) 根据基本矩阵估计运动 1. 计算基本矩阵 In reality, instead of solving to minimize , we seek E , least eigenvector of.
8 -point algorithm To enforce that E is of rank 2, E is replaced by E’ that minimizes subject to • It is achieved by SVD. Let , let then is the solution. . , where
8 -point algorithm % Build the constraint matrix A = [x 2(1, : )‘. *x 1(1, : )' x 2(1, : )'. *x 1(2, : )' x 2(1, : )'. . . x 2(2, : )'. *x 1(1, : )' x 2(2, : )'. *x 1(2, : )' x 2(2, : )'. . . x 1(1, : )' x 1(2, : )' ones(npts, 1) ]; [U, D, V] = svd(A); % Extract fundamental matrix from the column of V % corresponding to the smallest singular value. E = reshape(V(: , 9), 3, 3)'; % Enforce rank 2 constraint [U, D, V] = svd(E); E = U*diag([D(1, 1) D(2, 2) 0])*V';
Problem with 8 -point algorithm ~10000 ~100 ~10 0 0 Orders of magnitude difference between column of data matrix ! least-squares yields poor results 1
Normalized 8 -point algorithm normalized least squares yields good results Transform image to ~[-1, 1]x[-1, 1] (0, 500) (700, 500) (-1, 1) (0, 0) (700, 0) (-1, -1) (1, -1)
Normalized 8 -point algorithm [x 1, T 1] = normalise 2 dpts(x 1); [x 2, T 2] = normalise 2 dpts(x 2); A = [x 2(1, : )‘. *x 1(1, : )' x 2(1, : )'. *x 1(2, : )' x 2(1, : )'. . . x 2(2, : )'. *x 1(1, : )' x 2(2, : )'. *x 1(2, : )' x 2(2, : )'. . . x 1(1, : )' x 1(2, : )' ones(npts, 1) ]; [U, D, V] = svd(A); E = reshape(V(: , 9), 3, 3)'; [U, D, V] = svd(E); E = U*diag([D(1, 1) D(2, 2) 0])*V'; % Denormalise E = T 2'*E*T 1;
Normalization function [newpts, T] = normalise 2 dpts(pts) c = mean(pts(1: 2, : )')'; % Centroid newp(1, : ) = pts(1, : )-c(1); % Shift origin to centroid. newp(2, : ) = pts(2, : )-c(2); meandist = mean(sqrt(newp(1, : ). ^2 + newp(2, : ). ^2)); scale = sqrt(2)/meandist; T = [scale 0 -scale*c(1) 0 scale -scale*c(2) 0 0 1 ]; newpts = T*pts;
RANSAC repeat select minimal sample (8 matches) compute solution(s) for F determine inliers until (#inliers, #samples)<95% || too many times compute E based on all inliers
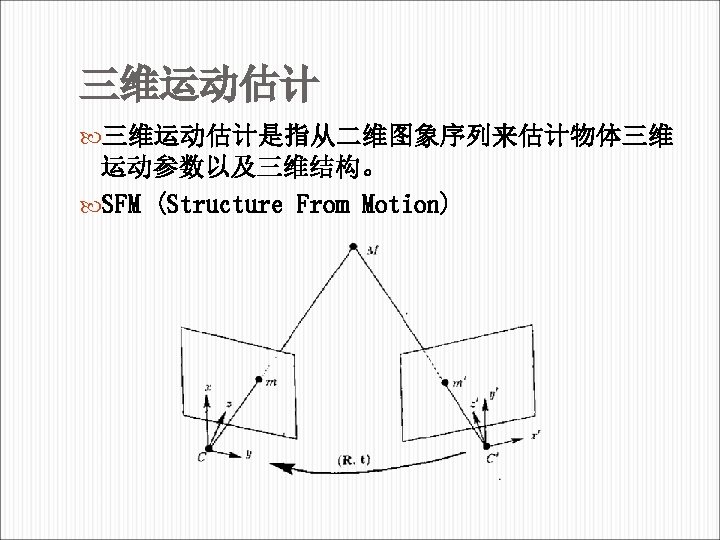
Structure from motion
Structure from motion Unknown camera viewpoints structure for motion: automatic recovery of camera motion and scene structure from two or more images. It is a self calibration technique and called automatic camera tracking or matchmoving.
坐标转换 Model-view Transformation Camera Coordinate System World Coordinate System
世界坐标系 相机坐标系 Camera Parameter Camera Projection Matrix Intrinsic Extrinsic
Image 1 Image 3 R 3, t 3 R 1, t 1 Image 2 R 2, t 2
Point 1 Point 2 Point 3 Image 1 Image 2 Image 3 Same Camera Same Setting = Same
Triangulation Image 1 Image 3 R 3, t 3 R 1, t 1 Image 2 R 2, t 2
Triangulation Image 1 Image 3 R 3, t 3 R 1, t 1 Image 2 R 2, t 2
相机内部参数矩阵 • Principle point offset – especially when images are cropped (Internet) • Skew • Radial distortion (due to optics of the lens)
Steps + = Images Points: Points More points: Points Meshes: Meshes Models: Structure from Motion Multiple View Stereo Model Fitting Texture Mapping Images Models: Image-based Modeling
Steps + = Images Points: Points More points: Points Meshes: Meshes Models: Structure from Motion Multiple View Stereo Model Fitting Texture Mapping Images Models: Image-based Modeling + + =
Steps + = Images Points: Points More points: Points Meshes: Meshes Models: Structure from Motion Multiple View Stereo Model Fitting Texture Mapping Images Models: Image-based Modeling + + =
Steps + = Images Points: Points More points: Points Meshes: Meshes Models: Structure from Motion Multiple View Stereo Model Fitting Texture Mapping Images Models: Image-based Modeling + + + =
Steps + = Images Points: Points More points: Points Meshes: Meshes Models: Structure from Motion Multiple View Stereo Model Fitting Texture Mapping Images Models: Image-based Modeling + + =
Steps + = Images Points: Points More points: Points Meshes: Meshes Models: Structure from Motion Multiple View Stereo Model Fitting Texture Mapping Images Models: Image-based Modeling + + =
Steps + = Images Points: Points More points: Points Meshes: Meshes Models: Structure from Motion Multiple View Stereo Model Fitting Texture Mapping Images Models: Image-based Modeling + + =
Pipeline Structure from Motion (SFM) Multi-view Stereo (MVS)
Pipeline Structure from Motion (SFM) Multi-view Stereo (MVS)
Two-view Reconstruction
Two-view Reconstruction
Two-view Reconstruction keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation
Keypoints Detection keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation
Descriptor for each point SIFT descriptor keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation
Same for the other images keypoints match keypoints SIFT descriptor fundamental matrix essential matrix [R|t] triangulation
Point Match for correspondences keypoints match keypoints SIFT descriptor fundamental matrix essential matrix [R|t] triangulation
Point Match for correspondences keypoints match keypoints SIFT descriptor fundamental matrix essential matrix [R|t] triangulation
Fundamental Matrix Image 1 R 1, t 1 Image 2 R 2, t 2
Estimating Fundamental Matrix • Given a correspondence • The basic incidence relation is Need 8 points
Estimating Fundamental Matrix for 8 point correspondences: Direct Linear Transformation (DLT)
RANSAC to Estimate Fundamental Matrix • For many times – Pick 8 points – Compute a solution for – Count number of inliers using these 8 points • Pick the one with the largest number of inliers
Fundamental Matrix Essential Matrix Image 1 R 1, t 1 Image 2 R 2, t 2
Essential Matrix For a given essential matrix and the first camera matrix , there are four possible choices for the second camera matrix :
Four Possible Solutions
Triangulation Image 1 R 1, t 1 Image 2 R 2, t 2
Two-view Reconstruction keypoints match keypoints fundamental matrix essential matrix [R|t] triangulation
Pipeline Structure from Motion (SFM) Multi-view Stereo (MVS)
Pipeline Taught Next
Merge Two Point Cloud
Merge Two Point Cloud There can be only one
Merge Two Point Cloud
Oops See From a Different Angle
Bundle Adjustment
Point 1 Image 2 Image 3 Point 2 Point 3
Bundle Adjustment A valid solution must let Re-projection = Observation and
Bundle Adjustment A valid solution and must let the Re-projection close to the Observation, i. e. to minimize the reprojection error
Bundle Adjustment Camera A valid solution and must let the Re-projection close to the Observation, i. e. to minimize the reprojection error Points
Initialization Matters • Input: Observed 2 D image position • Output: Unknown Camera Parameters (with some guess) Unknown Point 3 D coordinate (with some guess)
Descriptor: ZNCC (Zero-mean Normalized Cross-Correlation) • • • Invariant to linear radiometric changes More conservative than others such as sum of absolute or square differences in uniform regions More tolerant in textured areas where noise might be important
Descriptor: ZNCC (Zero-mean Normalized Cross-Correlation) • • • Invariant to linear radiometric changes More conservative than others such as sum of absolute or square differences in uniform regions More tolerant in textured areas where noise might be important
Seed for propagation
Matching Propagation (propagate. m) • Maintain a priority queue Q • Initialize: Put all seeds into Q with their ZNCC values as scores • For each iteration: – Pop the match with best ZNCC score from Q – Add new potential matches in their immediate spatial neighborhood into Q • Safety: handle uniqueness, and propagate only on matchable area
Matchable Area the area with maximal gradience > threshold
Result (dense. Math/run. m)
Triangulation Image 1 Image 3 R 3, t 3 R 1, t 1 Image 2 R 2, t 2
Final Result
Colorize the Point Cloud