Servomecanismo N 7 SRV Prof Dr Cesar da



")


 Adolf Hurwitz (1859")
")

 1948 Pré-computacional Pós-computacional")
 1948 Pré-computacional Harold Stephen")
 1948 Pré-computacional Pós-computacional")
 1948 Pré-computacional Pós-computacional")
")

 Lee de Forest (1873 -")





























.")
.")









- Slides: 57
Servomecanismo N 7 SRV • Prof. Dr. Cesar da Costa 1. a Aula: Introdução aos Servomecanismos
Historia - Servomecanismo 1769 Pré-científica 1948 Pré-computacional Pós-computacional Héron de Alexandria Sistema Automático de Abertura dos Portões
Pre - Cientifica 1769 Pré-científica 1948 Pré-computacional Pós-computacional Moinho de Vento
Pre - Cientifica 1769 Pré-científica 1948 Pré-computacional Pós-computacional James C. Maxwell (1831 - 1879) " On governors", 1868 James Watt (1736 - 1819) Governador de Watt
Pre - Computacional 1769 Pré-científica 1948 Pré-computacional Mensuração do Tempo Pós-computacional
Pre - Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional
Pre - Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional Vyshnegradskii (1831 -1895) Adolf Hurwitz (1859 - 1919) Edward John Routh (1831 - 1907)
Pre - Computacional 1769 Pré-científica Pré-computacional x 4 Alexander M. Lyapunov (1857 - 1918) 1948 Pós-computacional x* = (4. 07; 13. 1; 131. 04; 107241) x* = (462. 828; 0; 0; 0) x 1
Pre - Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional Período entre guerras: • Desenvolvimento de amplificadores para telefonia • Domínio da Freqüência : banda passante, margens de ganho e fase Hendrik Wade Bode (1905 -1982) Nathaniel B. Nichols (1914 -1997) Harold Stephen Black (1898 -1983) Harry Nyquist (1889 -1976)
Pre - Computacional 1769 Pré-científica Hendrik Wade Bode (1905 -1982) 1948 Pré-computacional Pós-computacional
Pre - Computacional 1769 Pré-científica Nathaniel B. Nichols (1914 -1997) 1948 Pré-computacional Harold Stephen Black (1898 -1983) Pós-computacional
Pre - Computacional 1769 Pré-científica Harry Nyquist (1889 -1976) 1948 Pré-computacional Pós-computacional
Pre - Computacional 1769 Pré-científica Walter R. Evans (1920 -1999) 1948 Pré-computacional Pós-computacional
Pre - Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional Helmut Schreyer Konrad Zuse (1910 -1995) Analytical Engine Alan Mathison Turing (1912 -1954) Charles Babbage (1791 - 1871)
Pre - Computacional 1769 Pré-científica ENIAC 19. 000 válvulas completado em 1945 1948 Pré-computacional Vannevar Bush (1890 -1974) Pós-computacional John von Neuman (1903 -1957)
Pre - Computacional 1769 Pré-científica 1948 Pré-computacional Audion (1906) Lee de Forest (1873 - 1961) Pós-computacional
Pre - Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional Shockley, Bardeen e Brattain dez 1947 Transistor Prêmio Nobel 1956
Pós - Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional 1971 Intel 4004
Pós Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional
Pós Computacional 1769 Pré-científica 1948 Pré-computacional Pós-computacional
Sala de Controle - Analógica
Sala de Controle - Analógica
Sala de Controle - Analógica
Sala de Controle Digital Estado da Arte
Sala de Controle Digital Estado da Arte
Sistema de Controle Digital Estado da Arte
Sistema de Controle Digital Estado da Arte
Sistema de Controle Digital - Estado da Arte
Sistema de Controle Digital - Estado da Arte
Sistema de Controle Digital Estado da Arte
Sistema de Controle Digital - Estado da Arte
Sistema de Controle Digital - Estado da Arte
Introdução aos Servomecanismos q No inicio Mecanismos manuais, operados por manivelas; q Operavam por meio de um sistema composto por sincro-geradores e repetidoras, que tinham por objetivo reproduzir o movimento no eixo de entrada (o eixo da manivela) no eixo de saída; q Requeriam alto torque para movimentação, mantendo o erro angular tão próximo de zero quanto possível.
Servomecanismo - Analógico
Servomecanismo - Analógico
Servomecanismo - Analógico
Servomecanismo - Analógico
Servomecanismo - Analógico
Servomecanismo - Analógico
Servomecanismo - Analógico
Servomecanismo
Servomecanismo q O emprego de plataformas microprocessadas revolucionou os sistemas de controle de servomecanismo, aumentando consideravelmente a flexibilidade e o desempenho desses sistemas. q A aplicação de controle digital por meio de computador permitiu maior velocidade na obtenção de informações e eficiência dos radares.
Servomecanismo
Servomecanismo Aplicação em sistemas. § Ilustração de um Sistema de Rastreamento de Míssil
Servomecanismo Aplicação em sistemas.
Servomecanismo Aplicação em Motion Control (1970).
Servomecanismo Aplicação em Motion Control (a partir de 2000).
Servomecanismo • Tipicamente, um servomecanismo é composto por 4 partes: v Uma fonte de energia, v Controlador: v Moduladores de potência, v Atuadores v Transdutores (sensores).
Servomecanismo • O controle do mecanismo é feito comandando os moduladores de potência, em função das referências e das variáveis, que se pretendem controlar. Para esse efeito, é necessário um feedback dessas variáveis assegurado pelos transdutores. Eletrico Hidraulico Pneumatico Amplificadores CLP CNC Drivers Servomotor Encoder Resolver Figura 1 - Diagrama de blocos de um servomecanismo
Servomecanismo Digital Controlador Interface Homem Maquina - IHM Amplificador YASKAWA POWER ALARM I/O 1 RESET D 1 AE 1 X Y C O M 1 G N D C O M 2 N L AC IN 0 24 V DC IN
Elementos Básicos de Servomecanismo q Para que o objetivo de um comando variável de quantidade mecânica (posição, velocidade, aceleração) possam ser atingidos, são necessários alguns elementos, sem os quais não podemos ter um servomecanismo. 1. Controlador: a partir do sinal de erro (diferença entre a posição desejada e a real), um sinal de comando (controle) é sintetizada de maneira a levar o sistema mecânico a posição desejada. 2. Amplificador: Gera os sinais de potencia que vao alimentar o atuador.
Elementos Básicos de Servomecanismo 3. Atuador: deve converter o sinal proveniente do controlador em um movimento mecânico (em geral um motor). 4. Sistema mecânico: conjunto de engrenagens, eixos de translação, molas, etc. 5. Sensor de posição: elemento responsável por re-injetar no controlador, dados que exprimem resultados exatos ou derivados da grandeza/quantidade mecânica controlada (e. g. , sensor de posição digital do tipo encoder).
Servomecanismo Digital Controlador Interface Homem Maquina - IHM Amplificador YASKAWA POWER ALARM I/O 1 RESET D 1 AE 1 X Y C O M 1 G N D C O M 2 N L AC IN 0 24 V DC IN Sensor Sistema Mecanico Atuador - Servomotor
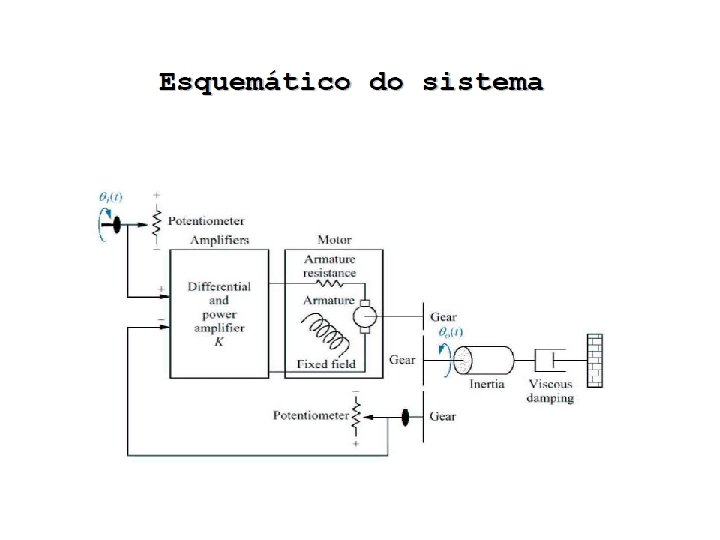
Diagrama de um servomecanismo
Aplicações de Motion – Plataforma Típica PC Cell Control Or MES Network Modbus TCP
Servomecanismo How Servo Motors Work & How To Control Servos using Arduino