Section 1 1 Simulink install 2 simple simulink

")
 • y=ksin(x) model 개발 : ① Sources Library에 있는 Sine Wave")
")
 • 주석을 삽입할 수 있다. -> 수학기호 및 다른 특수 문자")
")
 • >> simplot(Scope. Data) -> simplot 사용 기능. • simulation 결과")
 • Motion Equation : -> 2계 system이므로 2개의 적분 block이")
")
")
")
")
")
")
 % 시간 축의 범위는 0∼ 7초이고, % sampling frequency는")
")
")
 • 초기화 과정에서 model을 구성하는 blocks의 실행(즉, 갱신) 순서를 정함. ->")
 • Computability Model")
 • Enabled Subsystem : control signal이 positive인 경우, 각각의 simulation step에서")
")
")
")
 • 실습 : subsystem 안의 unit delay에 주의.")
")
 * Model workspace에 새 로운 변수 Amp. Var 생성. * Model")
")
 • Matlab Handle Graphics System – set. m, get. m •")
")
")
 • sim command : – Model을 matlab command window에서 실행. –")
 • Subsystems에 대한 custom user interfaces(즉, masks)를 새롭게 만드는 기법. • Masked")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
 function blk. Struct=slblocks %SLBLOCKS Defines the block library for a specific Toolbox")
 • Lim. Sim. Lib directory를 matlab 경로에 첨가해 주어야 함.")
")
")
 • Simulink model과 Matlab GUI 기능을 link.")
 • Matlab의 guide. m함수로 GUI 개발.")
 • 소스 분석.")

- Slides: 60
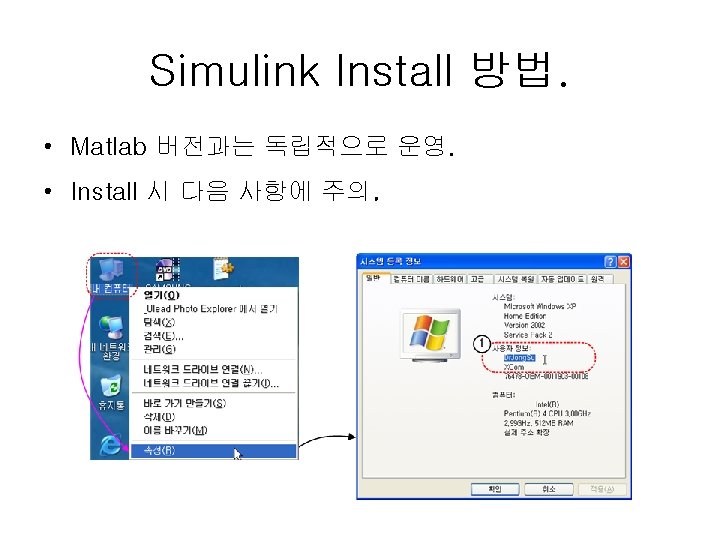
강의 순서 -- Section 1. • 1. Simulink의 특징과 install시 주의사항. • 2. simple simulink model 개발. • 3. simulink의 계산 방법. • 4. Triggered model concept. • 5. Model workspace concept. • 6. model parameter settings rule. • 7. masking concept • 8. simulink library 개발. -- Section 2. • 1. matlab과 simulink의 연동. • 2. simulink의 third party 소개.
Simple Simulink Model(1)
Simple Simulink Model(2) • y=ksin(x) model 개발 : ① Sources Library에 있는 Sine Wave block. ② Sinks Library에 있는 Scope block. ③ Math Library에 있는 Gain block.
Simple Simulink Model(3)
Simple Simulink Model(4) • 주석을 삽입할 수 있다. -> 수학기호 및 다른 특수 문자 삽입가능. • • Port Data type 표시 기능. Storage class 표시 기능. Sample Time Colors Signal Dimension 표시 기능.
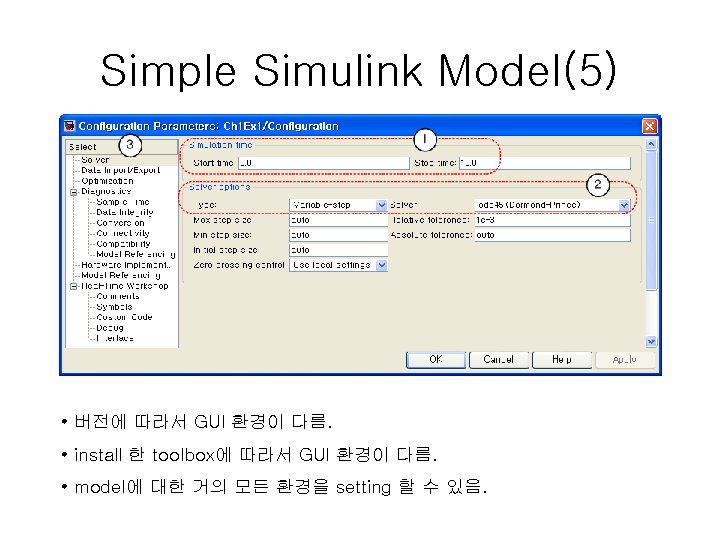
Simple Simulink Model(6)
Simple Simulink Model(7) • >> simplot(Scope. Data) -> simplot 사용 기능. • simulation 결과 2개의 경고문이 발생. 1) continuous states가 없음. 2) maximum step size : 0. 2
Simulink Model Ex 1(1) • Motion Equation : -> 2계 system이므로 2개의 적분 block이 필요. • damping 계수 c=1. 0 lb sec/ft, spring 상수 k=2 lb/ft, cart의 질량 m=5 slugs. ->
Simulink Model Ex 1(2)
Simulink Model Ex 1(3)
Simulink Model Ex 1(4)
Simulink Model Ex 1(5)
Subsystem (1)
Subsystem (2)
Simulink & Matlab 데이터 교환(1) % 시간 축의 범위는 0∼ 7초이고, % sampling frequency는 100[Hz]이다. >> XTime=0: 0. 01: 7; >> YData=sin(XTime); >> Mat. To. Sim=[XTime' YData']; >> >> plot(XTime, YData, 'k') set(gcf, 'color', 'w', 'pos', [232 326 360 352], 'units', 'pixels') axis([min(XTime) max(XTime) min(YData) max(YData)]) grid on
Simulink & Matlab 데이터 교환(2)
Simulink & Matlab 데이터 교환(3)
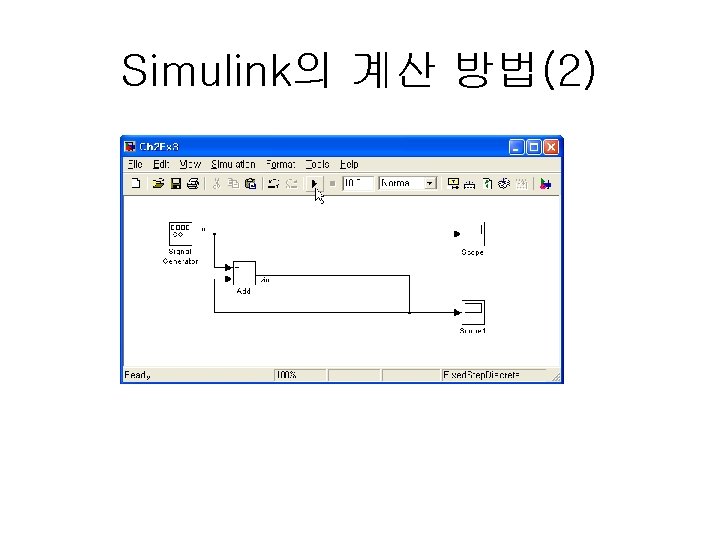
Simulink의 계산 방법(1) • 초기화 과정에서 model을 구성하는 blocks의 실행(즉, 갱신) 순서를 정함. -> Simulink는 모든 inputs에 대한 outputs의 관계에 근거하여 model을 구 성하는 block들을 분류. 1) direct-feedthrough port : 현재의 input port 값은 곧바로 block의 현재 output port 값을 결정. 예 : gain, Product. 등등 2) non-direct-feedthrough port : Integrator block의 output port는 입력이 아닌, states의 함수, Constant block은 입력을 가지고 있지 않으며, Memory block의 output은 이전 time step에서의 입력 • Simulink는 direct-feedthrough port를 갖지 않는 block을 update 순서의 앞에 놓고, direct-feedthrough port를 갖는 block을 update 순서의 뒤에 놓 는 초기화 과정을 수행하고 나서 update를 순서대로 수행.
Simulink의 계산 방법(3) • Computability Model
Triggered Model Comcept(1) • Enabled Subsystem : control signal이 positive인 경우, 각각의 simulation step에서 실행. 즉, scalar 또는 vector 형태를 갖는 control signal이 negative에서 positive로 바뀌는 순간 실행을 시작하여 positive에서 negative로 바뀌는 경우 실행을 멈춤. • Triggered Subsystem : 임의의 trigger event가 발생할 때마다 한번 실행한다. rising edge 또는 falling edge가 발생한 경우.
Triggered Model Comcept(2)
Triggered Model Comcept(3)
Triggered Model Comcept(4)
Triggered Model Comcept(5) • 실습 : subsystem 안의 unit delay에 주의.
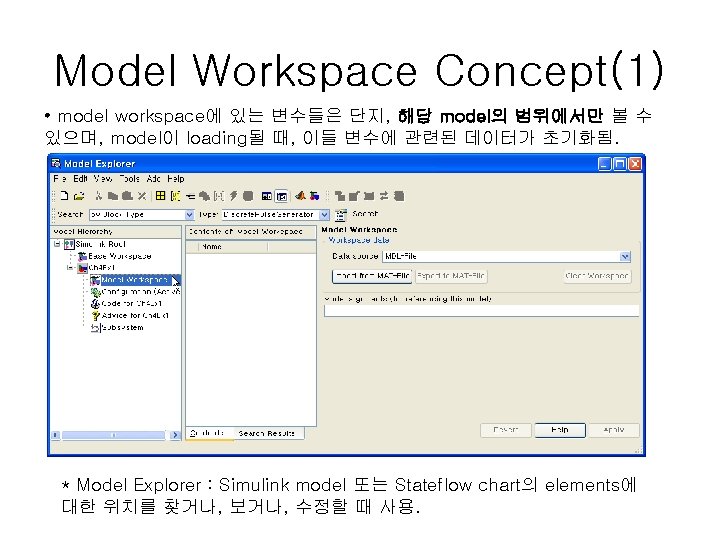
Model Workspace Concept(2)
Model Workspace Concept(3) * Model workspace에 새 로운 변수 Amp. Var 생성. * Model workspace에 있 는 Amp. Var를 Model 매 개변수로 선언.
Model Workspace Concept(4)
Model Parameters Setting(1) • Matlab Handle Graphics System – set. m, get. m • Simulink Parameter based System – set_param, get_param – set_param('obj', 'parameter 1', value 1, 'parameter 2', value 2, . . . ) – get_param('obj', 'parameter')
Model Parameters Setting(2)
Model Parameters Setting(3)
Model Parameters Setting(4) • sim command : – Model을 matlab command window에서 실행. – sim(‘model name’) • 예제:
Masking Concept(1) • Subsystems에 대한 custom user interfaces(즉, masks)를 새롭게 만드는 기법. • Masked subsystem의 요구 사항 – Mask Icon. – Mask Parameters – Mask Initialization Code – Mask Workspace :
Masking Concept(2)
Masking Concept(3)
Masking Concept(4)
Masking Concept(5)
Masking Concept(6)
Masking Concept(7)
Masking Concept(8)
Masking Concept(9)
Masking Concept(10)
Masking Concept(11)
Masking Concept(12)
Masking Concept(13)
Simulink Library(1)
Simulink Library(2)
Simulink Library(3) function blk. Struct=slblocks %SLBLOCKS Defines the block library for a specific Toolbox or Blockset. % % 2005, 6, 6 By Lim Jong Su % blk. Struct. Name=sprintf('Sim Library Test'); blk. Struct. Open. Fcn='Sim. Lib. By. Lim'; blk. Struct. Mask. Initialization=''; blk. Struct. Mask. Display=['disp(''Sim Library Test'')']; % Define the library list for the Simulink Library Browser. % Return the name of the library model and the name for it. Browser(1). Library='Sim. Lib. By. Lim'; Browser(1). Name ='Sim Library Test'; blk. Struct. Browser=Browser; %end of slblocks. m
Simulink Library(4) • Lim. Sim. Lib directory를 matlab 경로에 첨가해 주어야 함.
Simulink Library(5)
Simulink Library(6)
Matlab & Simulink 연동(1) • Simulink model과 Matlab GUI 기능을 link.
Matlab & Simulink 연동(2) • Matlab의 guide. m함수로 GUI 개발.
Matlab & Simulink 연동(3) • 소스 분석.
Simulink의 third Party • http: //www. mathworks. com/products/connections /company_name. html • Xilinx Syste Generator, Altera DSP Builder, Synplify DSP, Accel. Chip etc. • http: //www. mathworks. com/matlabcentral/fileexch ange/load. Category. do • http: //www. mathworks. com/access/helpdesk/help/ helpdesk. html