SCHEDULING SOURCESMark Manwaring Kia Bazargan Giovanni De Micheli

SCHEDULING SOURCESMark Manwaring Kia Bazargan Giovanni De Micheli Gupta Youn-Long Lin 99/09/13 M. Balakrishnan Camposano, J. Hofstede, Knapp, Mac. Millen Lin High-level Synthesis

Overview of Hardware Synthesis assign operations to physical resources under given constraints assign times to operations under given constraints reduce the amount of hardware, optimize the design in general. May be done with the consideration of additional constraints.

Outline of scheduling • The scheduling problem. 1. Scheduling without constraints. 2. Scheduling under timing constraints. • Relative scheduling. 3. Scheduling under resource constraints. • The ILP model (Integer Linear Programming). • Heuristic methods (graph coloring, etc). Timing constraints versus resource constraints

What is Scheduling
. It can")
Example of scheduling: ASAP This is As Soon as Possible Scheduling (ASAP). It can be used as a bound in other methods like ILP or when latency only is important, not area.

Example of Scheduling Adder number 1 Multiplier number 2 Adder number 3

More complex example of Scheduling

What is necessary to solve the scheduling problem? • Circuit model: • Sequencing graph. • Cycle-time is given. • Operation delays expressed in cycles. • Scheduling: • Determine the start times for the operations. • Satisfying all the sequencing (timing and resource) constraints. • Goal: • Determine area/latency trade-off. Do you remember what is latency?

• Scheduling affects • Area: maximum number of concurrent operations of same type is a lower bound on required hardware resources. • Performance: concurrency of resulting implementation.

Taxonomy of scheduling problems to solve 1. Unconstrained scheduling. 2. Scheduling with timing constraints: • • Latency. Detailed timing constraints. 3. Scheduling with resource constraints. • Related problems: • • • Chaining. What is chaining? Synchronization. What is synchronization? Pipeline scheduling.

• Simplest scheduling model • All operations have bounded delays. • All delays are in cycles. • Cycle-time is given. • No constraints - no bounds on area. • Goal • Minimize latency.

What are. Scheduling types of Scheduling 2 Algorithms? Scheduling problems are NP-hard, so all kind of heuristics are used • • • ASAP – As soon as possible ALAP List scheduling – Resource Constrained algorithms Force directed algorithms – time constrained Path based Percolation algorithms Simulated annealing Tabu search and other heuristics Simulated evolution Linear Programming Integer Linear Programming - time constrained ff o e d a r e. T c r u g o n i s d e n i R b al e& r o m i p T m • te s i g n i l edu h c S •
 within given constraints")
Types of Scheduling Processes Assignment of operations to time (control steps) within given constraints and minimizing a cost function • Time-constrained • Resource-constrained • With or without control (conditions) • With or without iterations (infinite loops) • Constructive • Iterative

Classification of Scheduling Algorithms

Scheduling Algorithms

Simplest model of scheduling • All operations have bounded delays. • All delays are expressed in numbers of cycles of a single one-phase clock. • Cycle-time is given. • No constraints - no bounds on area. • Goal: • Minimize latency.

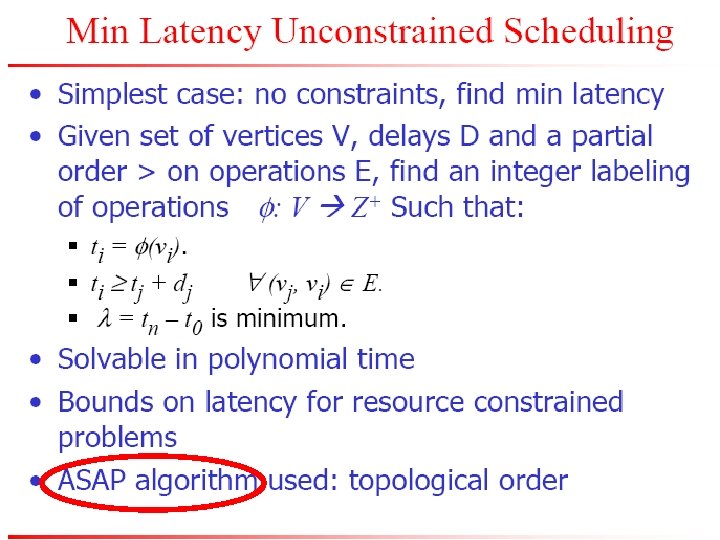
Minimum Latency Unconstrained Scheduling

Minimum-Latency Unconstrained Scheduling Problem • Unconstrained scheduling used when • Dedicated resources are used. • Operations differ in type. • Operations cost is marginal when compared to that of steering logic, registers, wiring, and control logic. • Binding is done before scheduling: resource conflicts solved by serializing operations sharing same resource. • Deriving bounds on latency for constrained problems.

Minimum-latency unconstrained scheduling problem • • Given a set of operations V with set of corresponding integer delays D and a partial order on the operations E: tj ti dj Find an integer labeling of the operations : V --> Z + , such that: ti tj +dj • t i = (v i ), • t i t j + d j i, j such that (v j , v i ) E • and tn is minimum. (v j , v i ) di Input to di must be stable

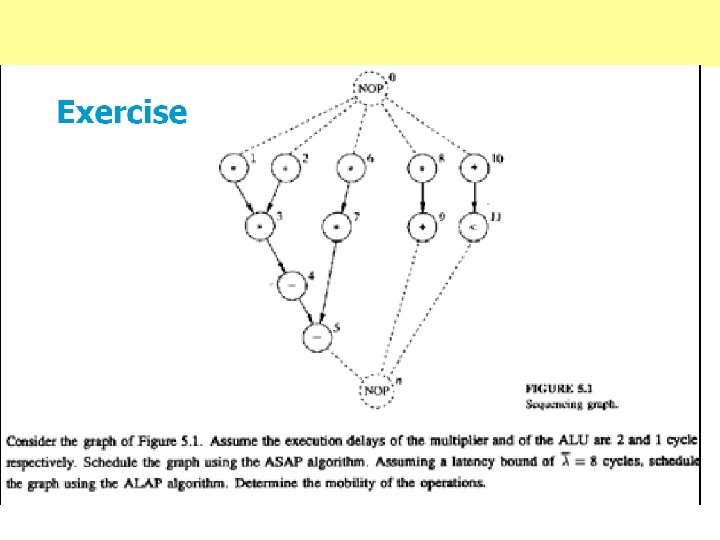
• Operations with zero mobility: • • • They are on the critical path. Operations with mobility one: • • {v 1, v 2, v 3, v 4, v 5 }. {v 6 , v 7 }. mobility two: Operations with mobility two: • {v 8 , v 9 , v Example of using mobility 10 , v 11 }. 1. Start from ALAP 2. Use mobility to improve

Operation Scheduling Formalisation Classes of scheduling algorithms

Time Constrained Scheduling

Latency Constrained Latency-Constrained Scheduling • ALAP solves a latency-constrained problem. • Latency bound can be set to latency computed by ASAP algorithm. • Mobility • Defined for each operation. • Difference between ALAP and ASAP schedule. • Zero mobility implies that an operation can be started only at one given time step. • Mobility greater than 0 measures span of time interval in which an operation may start. • Slack on the start time.

Time Constrained Scheduling

Scheduling under Detailed Timing Constraints • Motivation • Interface design. • Control over operation start time. • Constraints • Upper/lower bounds on start-time difference of any operation pair. • Minimum timing constraints between two operations • An operation follows another by at least a number of prescribed time steps • lij 0 requires tj ti + lij • Maximum timing constraints between two operations • An operation follows another by at most a number of prescribed time steps • uij 0 requires tj ti + uij

Scheduling under Detailed … Scheduling under Detailed Timing Constraints • Example • Circuit reads data from a bus, performs computation, writes result back on the bus. • Bus interface constraint: data written three cycles after read. • Minimum and maximum constraint of 3 cycles between read and write operations. • Example • Two circuits required to communicate simultaneously to external circuits. • Cycle in which data available is irrelevant. • Minimum and maximum timing constraint of zero cycles between two write operations.

… Constraint Graph Model Mul delay = 2 ADD delay =1

Scheduling under detailed timing constraints • Motivation: • Interface design. • Control over operation start time • Constraints: • Upper/lower bounds on start-time difference of any operation pair. • Feasibility of a solution.

Constraint graph model • Start from a sequencing graph. • Model delays as weights on edges. • Add forward edges for minimum constraints. • • Edge (vi , vj) with weight lij => t j t i +lij. Add backward edges for maximum constraints. • Edge (vi , vj) with weight: • • Add this edge for min constraint - u ij => t j t i + uij because t j t i + uij => t i t j - uij Add this edge for max constraint

Method for Scheduling with Unbounded-Delay Operations • Unbounded delays • Synchronization. • Unbounded-delay operations (e. g. loops). • Anchors. • Unbounded-delay operations. • Relative scheduling • Schedule ops w. r. to the anchors. • Combine schedules.

Method for Scheduling Under Detailed Timing Constraints • Presence of maximum timing constraints may prevent existence of a consistent schedule. • Required upper bound on time distance between operations may be inconsistent with first operation execution time. • Minimum timing constraints may conflict with maximum timing constraints. • A criterion to determine existence of a schedule: • For each maximum timing constraint uij • Longest weighted path between vi and vj must be uij

So now we can calculate this table from sequencing graph Example of using constraint graph with minimum and maximum constraints explain Sequencing graph Constraint graph

Method for Scheduling Under … Methods for Scheduling under Detailed Timing Constraints • Weight of longest path from source to a vertex is the minimum start time of a vertex. • Bellman-Ford or Lia-Wong algorithm provides the schedule. • A necessary condition for existence of a schedule is constraint graph has no positive cycles.

Methods for Scheduling Under Detailed Timing Constraints Shown in last slide Will follow

Methods for scheduling under detailed timing constraints • Start from the Sequencing Graph. Assumption: • All delays are fixed and known. • Set of linear inequalities. • Longest path problem. • Algorithms for the longest path problem were discussed in Chapter 2 of De Micheli: • Bellman-Ford, • Liao-Wong.
) { s 1 0 = 0; for (i =")
Bellman-Ford’s algorithm BELLMAN_FORD(G(V, E, W)) { s 1 0 = 0; for (i = 1 to N) s 1 i =w 0, i ; for (j =1 to N){ for (i =1 to N){ s j+1 i = min { s j i , (s j k +w q, i } if (s j+1 i == s j } return (FALSE) } i i ) return (TRUE) ; k i )},

Longest path problem • Use shortest path algorithms: • by reversing signs on weights. • Modify algorithms: algorithms • by changing min with max. • Remarks: • Dijkstra’s algorithm is not relevant. • Inconsistent problem: • Positive-weighted cycles.

Example – Bellman-Ford Use shortest path algorithms: by reversing signs on weights. source • Iteration 1: l 0 =0, l 1 =3, l 2 = 1, l 3 =. • Iteration 2: l 0 =0, l 1 =3, l 2 =2, l 3 =5. • Iteration 3: l 0 =0, l 1 =3, l 2 =2, l 3 =6. 1+4=5 2+4=6 3 -1=2
) { Liao-Wong’s algorithm for ( i = 1")
LIAO WONG(G( V, E F, W)) { Liao-Wong’s algorithm for ( i = 1 to N) l 1 i = 0; for ( j = 1 to |F|+ 1) { foreach vertex v i l j+1 i = longest path in G( V, E, W E ) ; flag = TRUE; foreach edge ( v p, v q) F { if ( l j+1 q < l j+ 1 p +w p, q ){ flag = FALSE; E = E ( v 0 , v q) with weight ( l } } if ( flag ) return (TRUE) ; } return (FALSE) } j+ 1 p +w p, q) adjust

Example – Liao-Wong Looking for longest path from node 0 to node 3 Only positive edges from (a) • Iteration 1: l 0 = 0, l 1 = 3, l 2 = 1, l 3 = 5. • Adjust: add edge (v 0 , v 2 ) with weight 2. • Iteration 2: l 0 = 0, l 1 = 3, l 2 = 2, l 3 = 6. (b) adjusted by adding longest path from node 0 to node 2

Method for scheduling with unbounded-delay operations • Unbounded delays: • Synchronization. • Unbounded-delay operations (e. g. loops). • Anchors. • Unbounded-delay operations. • Relative scheduling: • Schedule operations with respect to the anchors. • Combine schedules.

Relative scheduling method

Relative scheduling method • For each vertex: vertex • Determine relevant anchor set R(. ). • Anchors affecting start time. • Determine time offset from anchors. • Start-time: • Expressed by: • Computed only at run-time because delays of anchors are unknown.

timing constraints Relative scheduling under • Problem definition: • Detailed timing constraints. • Unbounded delay operations. • Solution: • May or may not exist. • Problem may be ill-specified.

Relative scheduling under timing constraints • Feasible problem: • A solution exists when unknown delays are zero. • Well-posed problem: • A solution exists for any value of the unknown delays. • Theorem: • A constraint graph can be made well-posed iff there are no cycles with unbounded weights.
 & (b) Ill-posed constraint (c) well-posed")
Example of Relative scheduling under timing constraints (a) & (b) Ill-posed constraint (c) well-posed constraint

Relative scheduling approach 1. Analyze graph: 1. Detect anchors. 2. Well-posedness test. 3. Determine dependencies from anchors. 2. Schedule operations with respect to relevant anchors: • Bellman-Ford, Liao-Wong, Ku algorithms. 3. Combine schedules to determine start times: times

Example of Relative scheduling

Example of control-unit synthesized for Relative scheduling

Operations must be serialized

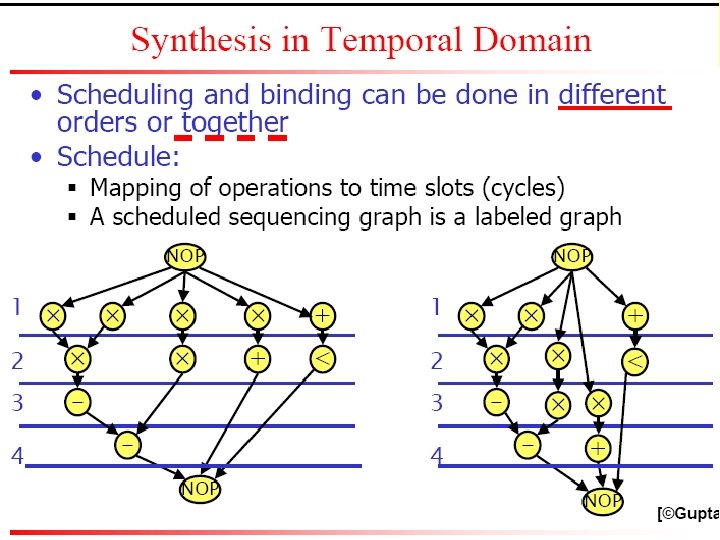
Scheduling and Binding

schedule binding

Scheduling Problem Scheduling formalization Problem

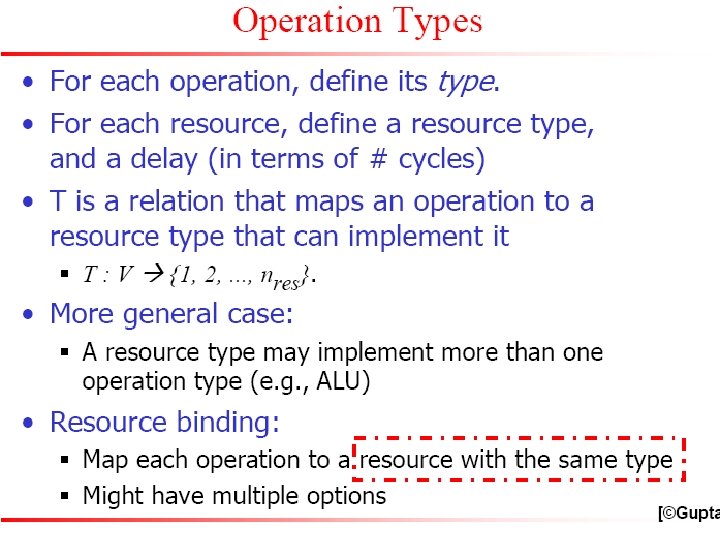
Various Operator types in Scheduling

ASAP Scheduling

ASAP Scheduling
){ Schedule v 0 by setting t S")
ASAP scheduling algorithm ASAP ( Gs(V, E)){ Schedule v 0 by setting t S 0 = 1; repeat { Select a vertex vi whose predecessors are all scheduled; Schedule vi by setting t S i = max t S j + dj ; } until (vn is scheduled) ; return (t S ); } j: (vj, vi) E Similar to breadth-first search

Example - ASAP • Solution • Multipliers = 4 • ALUs = 2 Latency Time=4

ALAP Scheduling

ALAP Scheduling successor

ALAP scheduling algorithm • As Late as Possible - ALAP • Similar to depth-first search

Example ALAP • Solution • multipliers = 2 • ALUs = 3 Latency Time=4

Remarks on ALAP and mobility • ALAP solves a latency-constrained problem. • Latency bound can be set to latency computed by ASAP algorithm. <-- using bounds, also in other approaches • Mobility: • Mobility is defined for each operation. • Difference between ALAP and ASAP schedule. • What is mobility? number of cycles that I can move upwards or downwards the operation • Slack on the start time.

Resource Constrained

Scheduling under resource constraints • Classical scheduling problem. • Fix area bound - minimize latency. • The amount of available resources affects the achievable latency. • Dual problem: • Fix latency bound - minimize resources. • Assumption: • All delays bounded and known.

Minimum latency resource-constrained scheduling problem • Given a set of operations V with integer delays D a partial order on the operations E, and upper bounds {ak ; k = 1, 2, …, nres}: • Find an integer labeling of the operations : V --> Z+ such that : • t i = '(v i ), • t i t j +d j 8 i; j s: t: (v j ; v i ) 2 E, • jfv i j. T (v i ) = k and t i l < t i +d i gj a k • and tn is minimum.

• Number of operations of any given type in any schedule step does not exceed bound. : V {1, 2, …nres}

Scheduling under resource constraints • Intractable problem. • Algorithms: • Exact: • Integer linear program. • Hu (restrictive assumptions). • Approximate: • List scheduling. • Force-directed scheduling.

Resource Constraint Scheduling ML-RCS: minimize latency, bound on resources MR-LCS: minimize resources, bound on latency

Algorithm of Hu for Resource Constraint Scheduling ML-RCS: minimize latency, bound on resources

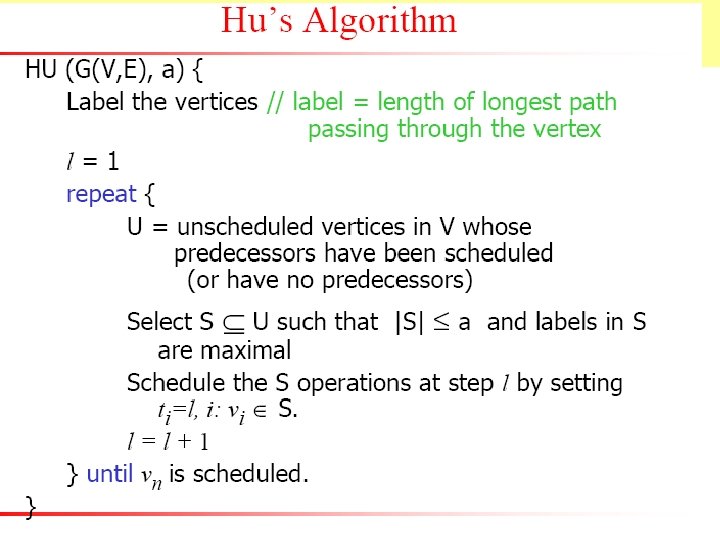
Hu's algorithm • Additional assumptions: • • Graph is a forest. Algorithm: • Label vertices with distance from sink. • Greedy strategy. • Exact solution. Distance from sink • Assumptions: • One resource type only. • All operations have unit delay. Example of using Hu’s algorithm

Algorithm Hu's schedule with a resources • Set step, l = 1. • Repeat until all operations are scheduled: • Select s a resources with: • All predecessors scheduled. • Maximal labels. • Schedule the s operations at step l. • Increment step l = l +1. • All operations have unit delay. • All operations have the same type.

• Minimum latency with a = 3 resources. • Step 1: • Select {v 1 , v 2 , v 6 }. • Step 2: • Select {v 3 , v 7 , v 8 }. • Step 3: • Select {v 4 , v 9 , v • 10 Step 4: • Select {v 5 , v 11 }. We always select 3 resources }. Algorithm Hu's schedule with a resources

• Minimum latency with a = 3 resources. • Step 1: • Select {v 1 , v 2 , v 6 }. • Step 2: • Select {v 3 , v 7 , v 8 }. • Step 3: • Select {v 4 , v 9 , v • 10 Step 4: • Select {v 5 , v 11 }. We always select 3 resources }. Algorithm Hu's schedule with a resources

Example of Hu’s Algorithm Distance from sink

Example of Hu’s Algorithm

Exactness of Hu's algorithm • Theorem 1: • Given a DAG with operations of the same type. • a is a lower bound on the number of resources to complete a schedule with latency . • is a positive integer. • Theorem 2: • Hu's algorithm applied to a tree with unit-cycle resources achieves latency with a resources. • Corollary: • Since a is a lower bound on the number of resources for achieving , then is minimum.

LIST scheduling

List scheduling idea

Example DFG List Schedule

Example • Assumptions • a 1 = 2 multipliers with delay 1. • a 2 = 2 ALUs with delay 1. • First Step • U 1, 1 = {v 1, v 2, v 6, v 8} • Select {v 1, v 2} • U 1, 2 = {v 10}; selected • Second step • U 2, 1 = {v 3, v 6, v 8} • select {v 3, v 6} • U 2, 2 = {v 11}; selected • Third step • U 3, 1 = {v 7, v 8} • Select {v 7, v 8} • U 3, 2 = {v 4}; selected • Fourth step • U 4, 2 = {v 5, v 9}; selected

List Scheduling Algorithms • Priority list heuristics. • Assign a weight to each vertex indicating its scheduling priority • Longest path to sink. • Longest path to timing constraint.

List scheduling algorithms • Heuristic method for: • 1. Minimum latency subject to resource bound. • 2. Minimum resource subject to latency bound. • Greedy strategy (like Hu's). • General graphs (unlike Hu's).

LIST scheduling

List scheduling algorithm for minimum resource Usage

List scheduling algorithm … List Scheduling Algorithm for Minimum Latency for minimum latency for resource bound • Candidate Operations Ul, k • Operations of type k whose predecessors are scheduled and completed at time step before l • Unfinished operations Tl, k are operations of type k that started at earlier cycles and whose execution is not finished at time l • Note that when execution delays are 1, Tl, k is empty.
, a")
List scheduling algorithm for minimum latency for resource bound LIST_L ( G(V, E), a ) { l = 1; repeat { for each resource type k = 1, 2, …, nres { Determine candidate operations U l, k ; Determine unfinished operations T l, k ; Select Sk U l, k vertices, such that |Sk| + |T l, k| a k ; Schedule the S k operations at step l; } l = l +1; } until (vn is scheduled) ; return (t ); }

List scheduling algorithm 1. List scheduling for minimum latency algorithm for minimum latency for resource bound • Assumptions: • a 1 = 3 multipliers with delay 2. • a 2 = 1 ALUs with delay 1. Now we need two time units for multiplier

• Assumptions Example • a 1 = 3 multipliers with delay 2. • a 2 = 1 ALU with delay 1.
![• • • Assume =4 Let a = [1, 1]T First Step •](http://slidetodoc.com/presentation_image/334d4d65f30763dd882e3f64c9c72dfa/image-95.jpg "• • • Assume =4 Let a = [1, 1]T First Step •")
• • • Assume =4 Let a = [1, 1]T First Step • U 1, 1 = {v 1, v 2, v 6, v 8} • Operations with zero slack {v 1, v 2} • a = [2, 1]T • U 1, 2 = {v 10} Second step • U 2, 1 = {v 3, v 6, v 8} • Operations with zero slack {v 3, v 6} • U 2, 2 = {v 11} Third step • U 3, 1 = {v 7, v 8} • Operations with zero slack {v 7, v 8} • U 3, 2 = {v 4} Fourth step • U 4, 2 = {v 5, v 9} • Both have zero slack; a = [2, 2]T

1. List scheduling algorithm for minimum latency for resource bound • Assumptions: • • a 1 = 3 multipliers with delay 2. a 2 = 1 ALUs with delay 1. • • Solution 3 multipliers as assumed 1 ALU as assumed LATENCY 7
, );")
Compute the latest possible start times t. L by ALAP ( G(V, E), ); 2. List scheduling algorithm for minimum resource usage

2. Example: List scheduling algorithm for minimum resource usage We can move them Now we assume the same time of each operation From ALAP • overlap • • Solution 2 multipliers 1 ALU LATENCY 4

List Scheduling Algorithm example Assume 1 ML-RCS ALU Assume 3 multipliers * * * - * * + < Other way of explanation of the same as in last slide t=0 mul 3 m 1 ALU t=1 t=2 3 mul t=3 1 ALU t=4 1 ALU Now we assume the same time of each operation t=5 1 ALU

List Scheduling Algorithm example ML-RCS

Generic List Scheduling
 • ready operation list/resource")
List Scheduling Example • DFG with mobility labeling (inside <>) • ready operation list/resource constraint • The scheduled DFG

Static-List Scheduling • DFG • Partial schedule of five nodes • Priority list The final schedule

Classification of Scheduling Approaches

Classification of Scheduling Approaches

Classification of Scheduling Approaches
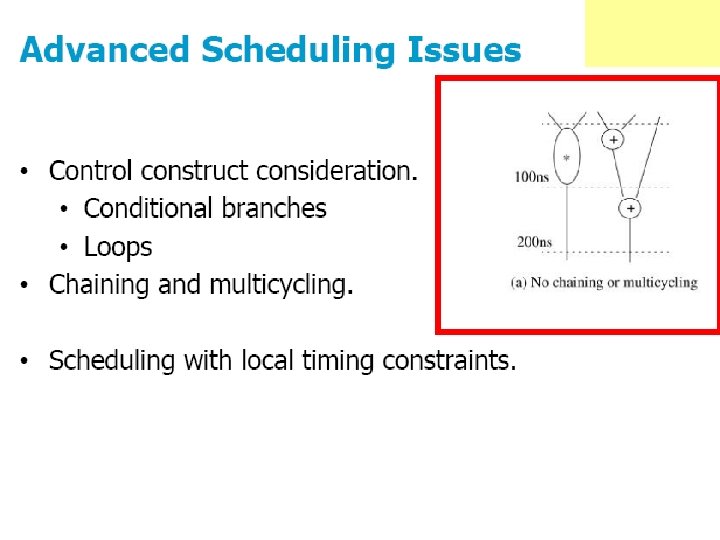
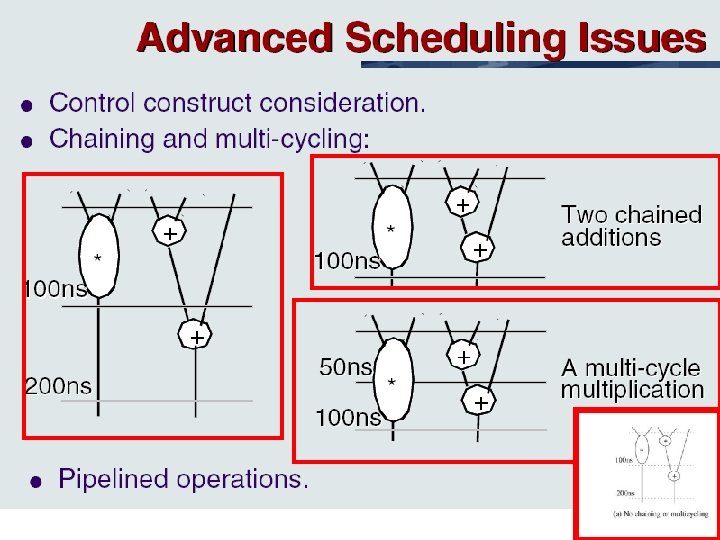

Scheduling with chaining • Consider propagation delays of resources not in terms of cycles. • Use scheduling to chain multiple operations in the same control step. • Useful technique to explore effect of cycle-time on area/latency trade-off. • Algorithms: • ILP, • ALAP/ASAP, • List scheduling.

Example of Scheduling with chaining • Cycle-time: 60.

Summary • Scheduling determines area/latency trade-off. • Intractable problem in general: • Heuristic algorithms. • ILP formulation (small-case problems). • Chaining: • Incorporate cycle-time considerations.

Other scheduling approaches

Three variants of Scheduling

Finite Impulse Response Filter Example 1 This can be directly used for synthesis with 11 multipliers, 10 adders and 10 registers. But the latency would be 1 multiplier + 10 adders

2 multipliers FIR Scheduling 1 adder, 1 multiplier This is also bad as we use both multipliers only in stage 1 There are many ways to solve this problem, transform the tree, schedule, allocate, pipeline, retime

Example: Cascade Filter optimization Example 2 This is not FIR, six coefficients Look to ci coefficients and compare with two previous slides.

2 mul, 2 add Cascade Filter Scheduling, cont example 2

Example 3 Infinite Impulse Response Filter IIR Filter, 10 coefficients

IIR Filter Scheduling continued IIR Filter, 10 coefficients Two adders two multipliers

Minimize Resources Subject to bound on Latency = MR-LCS
- Slides: 122