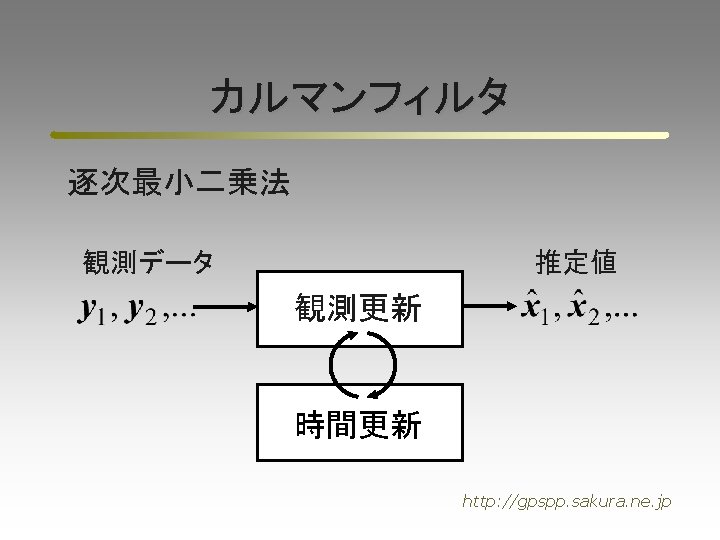
RTK Basics and Implementations of RealTime Kinematic RTK
測位の基礎と実装 Basics and Implementations of Real-Time Kinematic (RTK) Positioning 技術コンサルタント 高須 知二 Tomoji TAKASU")
リアルタイムキネマティック (RTK)測位の基礎と実装 Basics and Implementations of Real-Time Kinematic (RTK) Positioning 技術コンサルタント 高須 知二 Tomoji TAKASU

RTK測位の概念 GPS/GNSS Satellites Rover Baseline Reference Station Communication Link http: //gpspp. sakura. ne. jp
(1/3) Satellite 0: 00 GPS Week day 1 GPST(sec) http: //gpspp. sakura. ne. jp")
衛星軌道(放送暦)(1/3) Satellite 0: 00 GPS Week day 1 GPST(sec) http: //gpspp. sakura. ne. jp
(2/3) Satellite http: //gpspp. sakura. ne. jp")
衛星軌道(放送暦)(2/3) Satellite http: //gpspp. sakura. ne. jp

 Satellite s Receiver r http: //gpspp. sakura. ne. jp")
幾何学距離 光差方程式(Light-Time Eq. ) Satellite s Receiver r http: //gpspp. sakura. ne. jp
 Satellite 2 Satellite 1 Satellite 3 Satellite n Receiver r http: //gpspp. sakura.")
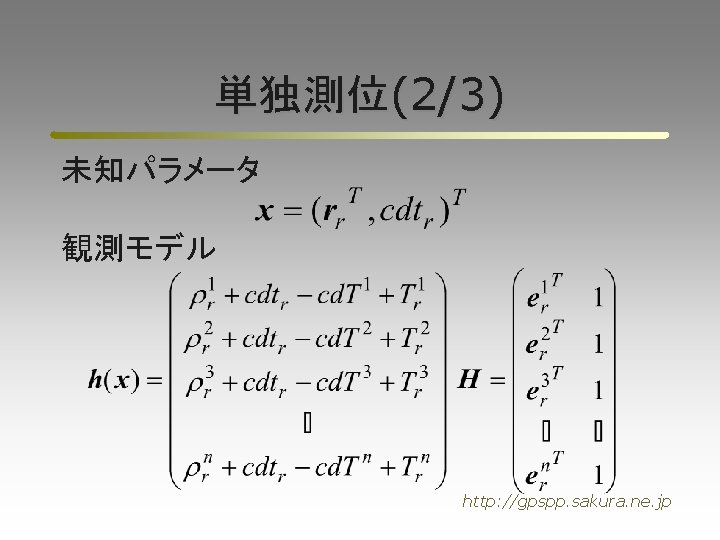
単独測位(1/3) Satellite 2 Satellite 1 Satellite 3 Satellite n Receiver r http: //gpspp. sakura. ne. jp
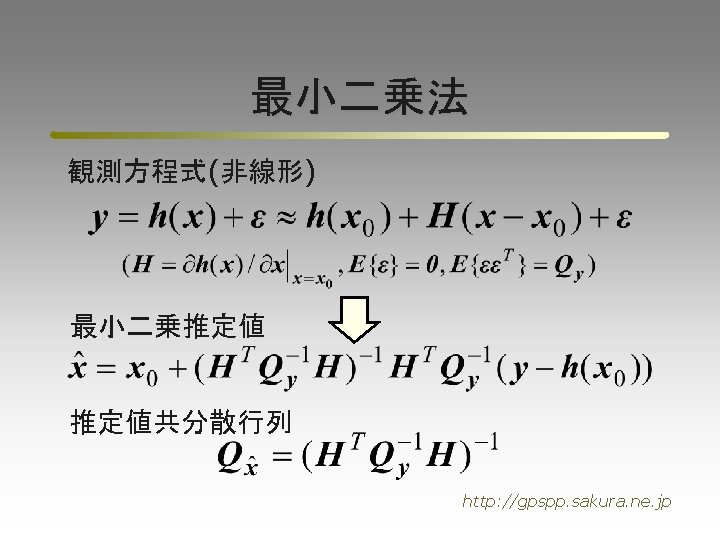
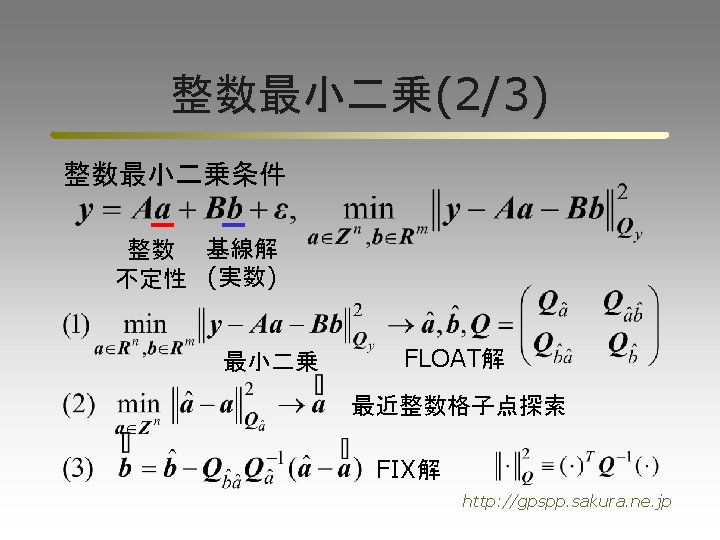
 観測量 最小二乗解(Gauss-Newton) http: //gpspp. sakura. ne. jp")
単独測位(3/3) 観測量 最小二乗解(Gauss-Newton) http: //gpspp. sakura. ne. jp
 10 Single Point Positioning Solution : 960583 MEAN: 0. 8191 m")
単独測位解例 East (m) 10 Single Point Positioning Solution : 960583 MEAN: 0. 8191 m RMS: 1. 4907 m 0 North (m) -10 10 MEAN: 1. 0867 m RMS: 1. 4880 m 0 Up (m) -10 10 MEAN: 0. 4081 m RMS: 2. 7906 m 0 -10 0: 00 1: 00 2: 00 3: 00 http: //gpspp. sakura. ne. jp

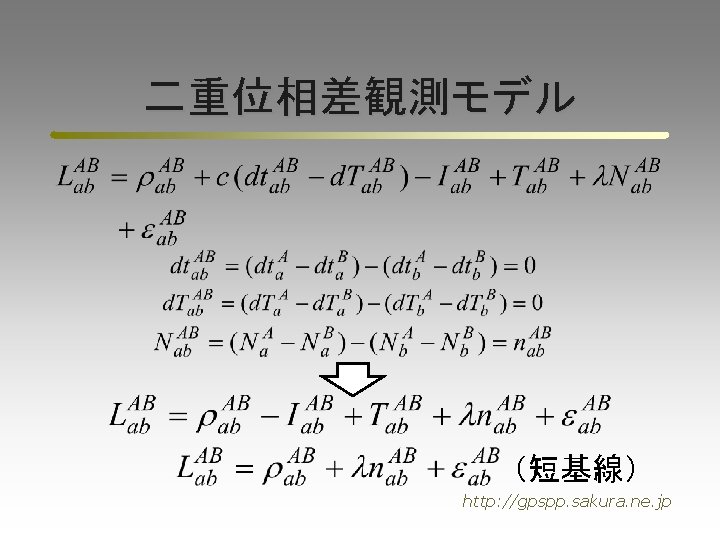
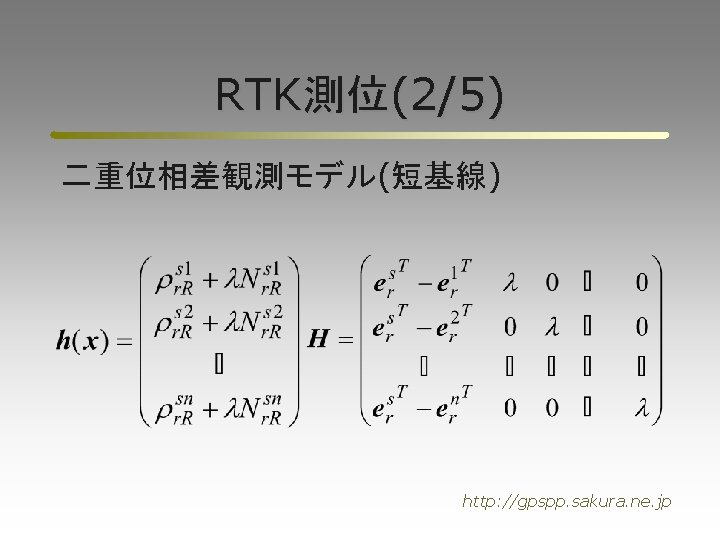
二重位相差 Satellite A Receiver a Satellite B Receiver b http: //gpspp. sakura. ne. jp
 Satellite s (Reference Sat) Satellite n")
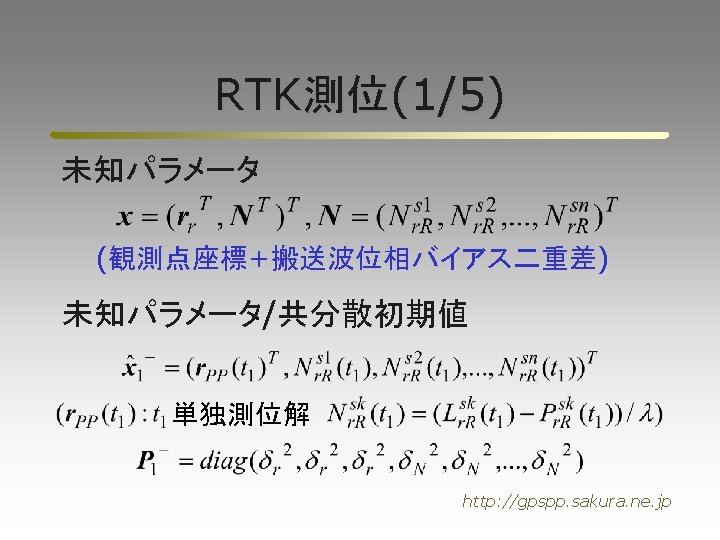
RTK測位 Satellite 2 Satellite 1 Receiver r (Rover) Satellite s (Reference Sat) Satellite n Receiver R (Reference Station) http: //gpspp. sakura. ne. jp
 RTK Position (FLOAT) : Baseline=960583 -92110 (14. 1 km) East (m) 0. 2")
RTK測位解例(FLOAT解) RTK Position (FLOAT) : Baseline=960583 -92110 (14. 1 km) East (m) 0. 2 MEAN: -0. 0163 m RMS: 0. 0423 m 0 North (m) -0. 2 MEAN: -0. 0022 m RMS: 0. 0485 m 0 Up (m) -0. 2 MEAN: -0. 0073 m RMS: 0. 0517 m 0 -0. 2 0: 00 1: 00 2: 00 3: 00 http: //gpspp. sakura. ne. jp
AR手法の例 D. Kim et al. , GPS Ambiguity Resolution and Validation Methodologies, Trend and")
高速(OTF)AR手法の例 D. Kim et al. , GPS Ambiguity Resolution and Validation Methodologies, Trend and Issues, International Symposium on GPS/GNSS, 2000 http: //gpspp. sakura. ne. jp

 http: //gpspp. sakura. ne. jp")
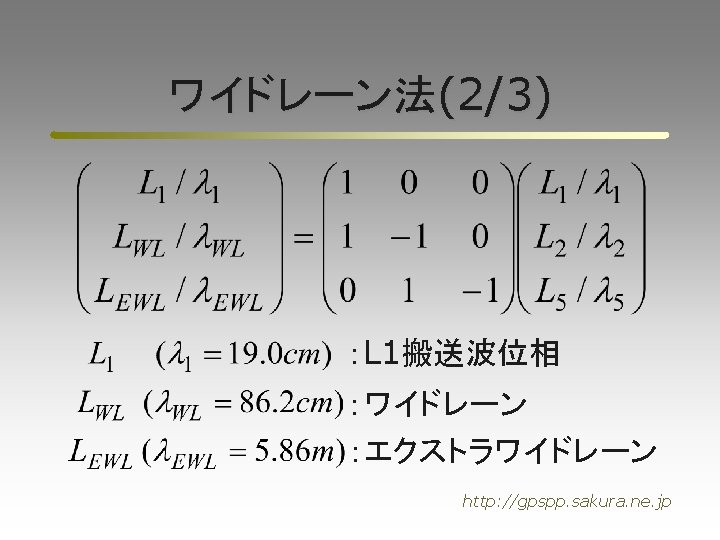
ワイドレーン法(3/3) http: //gpspp. sakura. ne. jp
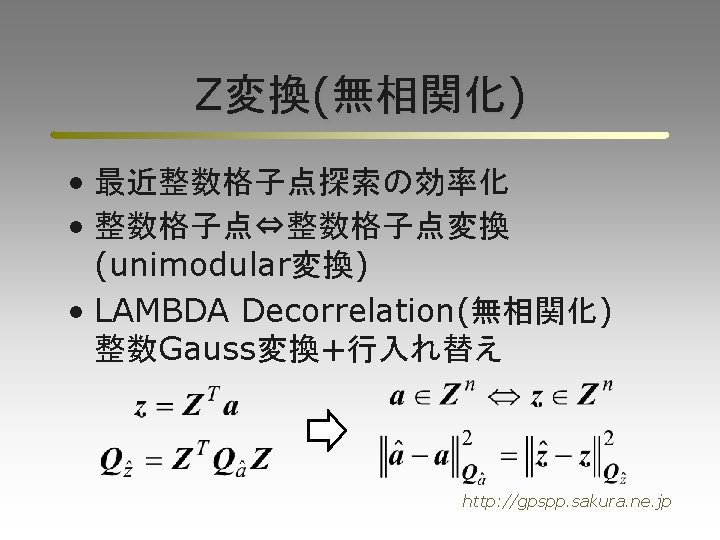

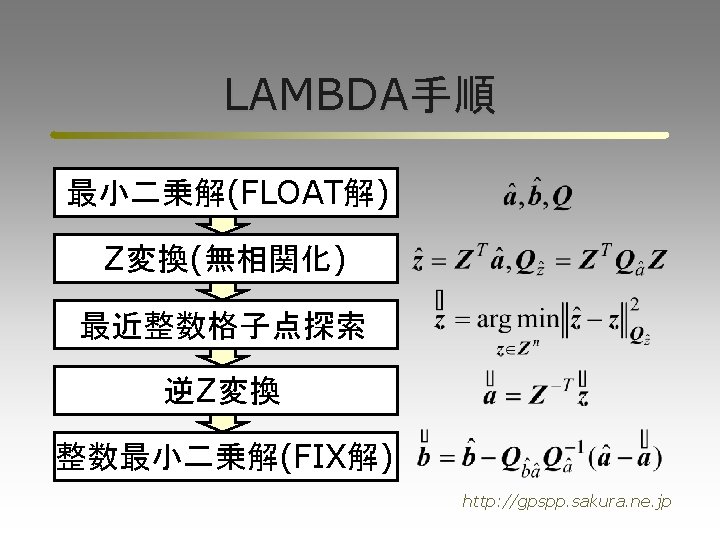
Z変換の例 http: //gpspp. sakura. ne. jp

 http: //gpspp. sakura. ne. jp")
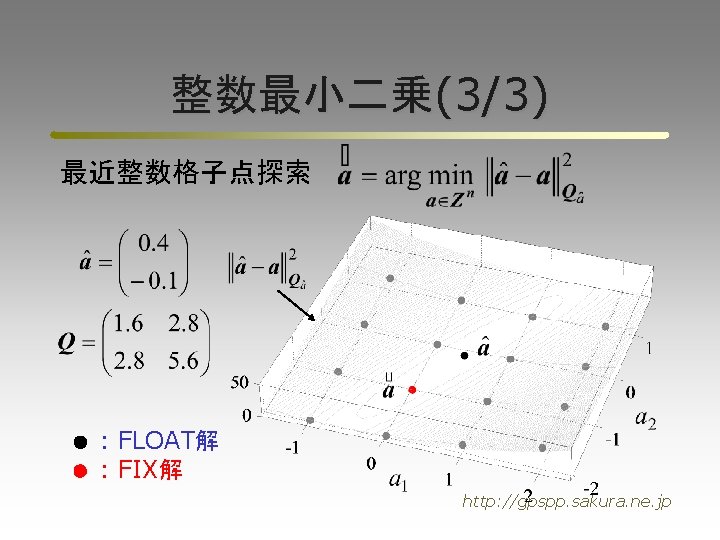
最近整数格子点探索(2/3) http: //gpspp. sakura. ne. jp
 -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp.")
最近整数格子点探索(3/3) -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp. sakura. ne. jp
 -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp.")
最近整数格子点探索(3/3) -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp. sakura. ne. jp
 -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp.")
最近整数格子点探索(3/3) -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp. sakura. ne. jp
 -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp.")
最近整数格子点探索(3/3) -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp. sakura. ne. jp
 -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp.")
最近整数格子点探索(3/3) -1 0 1 0 -1 0 -2 -1 0 1 2 http: //gpspp. sakura. ne. jp
 15 : with decorrelation : without decorrelation (Pentium 4 3.")
LAMBDA実行時間例 Execution Time (ms) 15 : with decorrelation : without decorrelation (Pentium 4 3. 2 GHz Intel C/C++8. 0) 10 5 10 15 20 25 30 N : Number of Ambiguities 35 40 http: //gpspp. sakura. ne. jp
 East (m) 0. 2 RTK Position (FIX) : Baseline=960583 -92110(14. 1 km) MEAN:")
RTK測位解例(FIX解) East (m) 0. 2 RTK Position (FIX) : Baseline=960583 -92110(14. 1 km) MEAN: 0. 0137 m RMS: 0. 0158 m 0 North (m) -0. 2 MEAN: 0. 0031 m RMS: 0. 0089 m 0 Up (m) -0. 2 MEAN: -0. 0120 m RMS: 0. 0257 m 0 -0. 2 0: 00 1: 00 2: 00 3: 00 http: //gpspp. sakura. ne. jp
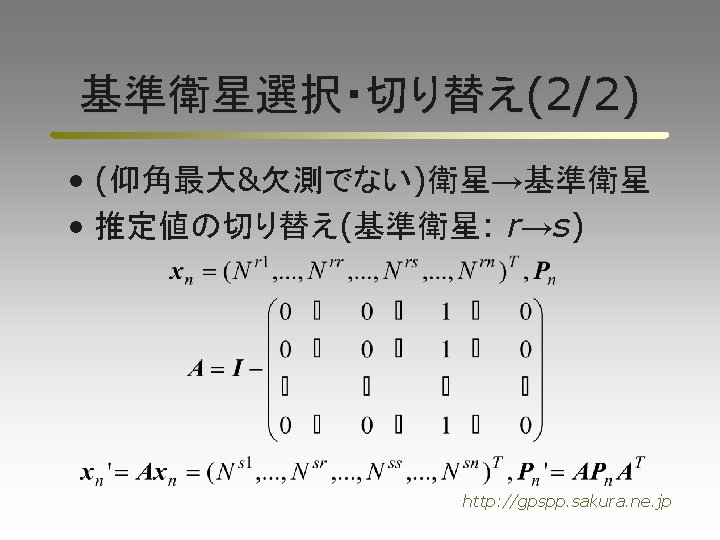
 基準衛星 Sat 1 Sat 2 Sat 3 Sat 4 Sat 5 欠測 t")
基準衛星選択・切り替え(1/2) 基準衛星 Sat 1 Sat 2 Sat 3 Sat 4 Sat 5 欠測 t http: //gpspp. sakura. ne. jp
 http: //gpspp. sakura. ne. jp")
電離層遅延推定(2/4) http: //gpspp. sakura. ne. jp
 0. 2 0固定(FIX率=100%) 推定 (FIX率=98. 1%) RMS: 0. 0307 m RMS: 0. 0060")
電離層遅延推定(3/4) 0. 2 0固定(FIX率=100%) 推定 (FIX率=98. 1%) RMS: 0. 0307 m RMS: 0. 0060 m RMS: 0. 0183 m RMS: 0. 0077 m RMS: 0. 0370 m RMS: 0. 0183 m 0 -0. 2 0 -0. 2 0: 00 1: 00 2: 00 0: 00 (Baseline=23. 1 km) 1: 00 2: 00 3: 00 http: //gpspp. sakura. ne. jp
 電離層遅延推定(4/4) 0. 1 0. 05 0 -0. 05 -0.")
DD of Ionospheric Delay (m) 電離層遅延推定(4/4) 0. 1 0. 05 0 -0. 05 -0. 1 0: 00 1: 00 (Baseline=23. 1 km) 2: 00 3: 00 http: //gpspp. sakura. ne. jp

複数基線の利用 複数基線 単一基線 Rover Reference Station http: //gpspp. sakura. ne. jp

RTK用通信標準 • RTCM SC-104 DGPS補正情報 RTK用観測データ ネットワークRTK用補正情報 etc. • NTRIP(Networked Transport of RTCM via Internet Protocol) • NMEA http: //gpspp. sakura. ne. jp

おまけ http: //gpspp. sakura. ne. jp
- Slides: 66