Relativistic Kinematics Collisions Relativistic Kinematics Collisions Consider 2






 Along the x direction. •")
 Solve for γu‘s & then get the")
, defining q (m 1/m 2) γ 1´ =")


- Slides: 12
Relativistic Kinematics & Collisions
Relativistic Kinematics & Collisions • Consider 2 colliding particles m 1, m 2. If the 2 velocities are significant fractions of c, we must use relativity to analyze. • Recall: In the standard (Newtonian) treatment of the 2 body problem, we change coordinates from r 1, r 2 to Center of Mass coordinate R & relative coordinate r.
• As we’ve seen, mass & energy are intimately related in Relativity, so it’s no longer (rigorously) meaningful to speak of a “Center of Mass” system. Instead, a “Center of Momentum” system is used. • The Center of Momentum (COM) system is DEFINED as the system in which the total (3 d) linear momentum is zero. • To analyze a collision: Choose the COM system as inertial frame S´ & the lab system as inertial frame S. To go from one to another just apply a Lorentz transformation!
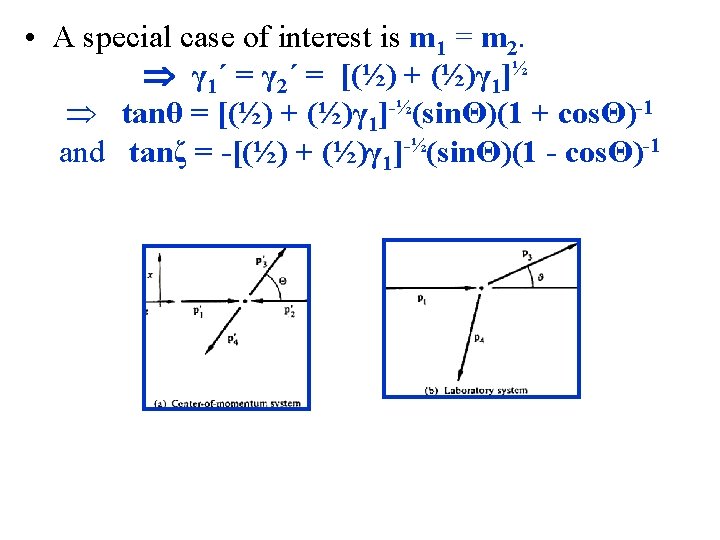
• Procedure: Solve the problem in the COM system & then transform back to the lab system with a Lorentz transformation. Assume an elastic collision. Figure: 2 colliding particles m 1, m 2. Views of the collision in the COM system and in the lab system.
2 particles m 1, m 2. • In the lab system S, choose coordinates so that m 1 moves initially along the x axis with velocity u 1 Assume initially m 2 is at rest, u 2 = 0. • In the COM system S´, m 2 initially moves with velocity u 2´. S´ is moving with respect to S with velocity u 2´ in the opposite direction as the initial motion of m 1.
2 particles m 1, m 2. • Goal: Find the scattering angle Θ in the COM frame, the scattering angle θ in the lab frame & the final momenta p 3 & p 4 in the lab frame. • Recall definition of relativistic 4 -Vector momentum: P = (p 0, p) = γum(c, u) = [(E/c), p]
COM frame definition: p 1´ = p 2´ (1) Along the x direction. • The 3 d momentum is: p = γumu 2 -½ γu [1 - (βu) ] , βu (u/c), • Identity: γuβu [(γu)2 -1]½ • Solve for γu‘s & then get the u’s.
p 1´ = p 2´ (1) Solve for γu‘s & then get the u’s. (1) becomes: γ 1´m 1 u 1´= γ 2´m 2 u 2´ (2) • Consider: γi´ui´= γi´c(ui´/c) = cγi´βi´ = c[(γi´)2 -1]½ (2) is: m 1 c[(γ 1´)2 - 1]½ = m 2 c[(γ 2´)2 - 1]½ (3) • The Lorentz transformation from the lab frame S to the COM frame S´ (moving with u 2´) gives: p 1´ = γ 2´[p 1 - (β 2´/c)E 1] (4) p 1 = γ 1 m 1 u 1, E 1 = γ 1 m 1 c 2 (5) • Also have the (definitions): • Solve by combining (2)-(5) to get γ 1´& γ 2´ in terms of γ 1.
• Results are (student exercise!), defining q (m 1/m 2) γ 1´ = [γ 1+ q][1 + 2γ 1 q +q 2]-½ (6 a) γ 2´ = [γ 1+ q-1][1 + 2γ 1 q-1 + q-2]-½ (6 b) • Note that the final momenta of both m 1 & m 2 have both x & y components in both frames! • Now, use conservation of momentum again in the S´ frame & get p 3 x´ = p 1´cosΘ, p 3 y´= p 1´sinΘ. • Similarly for p 4 x´, p 4 y´.
• Finally, write equations for the inverse Lorentz transformation from the COM system S´ back to the lab system S after scattering. • Final Lab frame Momentum of m 1 (see figure): p 3 x = γ 2´[p 3 x´ + (β 2´/c)E 1´] • Algebra (combining a number of previous equations) gives: p 3 x = m 1 cγ 1´γ 2´[β 1´cosΘ + β 2´] (a) • Similarly, get p 3 y = m 1 cγ 1´β 1´sinΘ (b) • From (a) & (b) get lab frame scattering angle θ: tanθ = (p 3 y/p 3 x) = [(γ 2´)-1 sinΘ][cosΘ + (β 2´/β 1´)]-1
• Similarly for m 2: • Final Lab frame Momentum of m 2 (see figure): p 4 x = γ 2´[p 4 x´ + (β 2´/c)E 2´] • Algebra (combining a number of previous eqtns) gives: p 4 x = m 2 c(γ 2´)2β 2´(1 - cosΘ) (c) p 4 y = -m 2 cγ 2´β 2´sinΘ (d) • From (c) & (d), get the lab frame recoil angle ζ: tanζ = (p 4 y/p 4 x) = [(γ 2´)-1 sinΘ][1 - cosΘ]-1 • Similarly, we get