R 1 2 3 about xaxis about yaxis
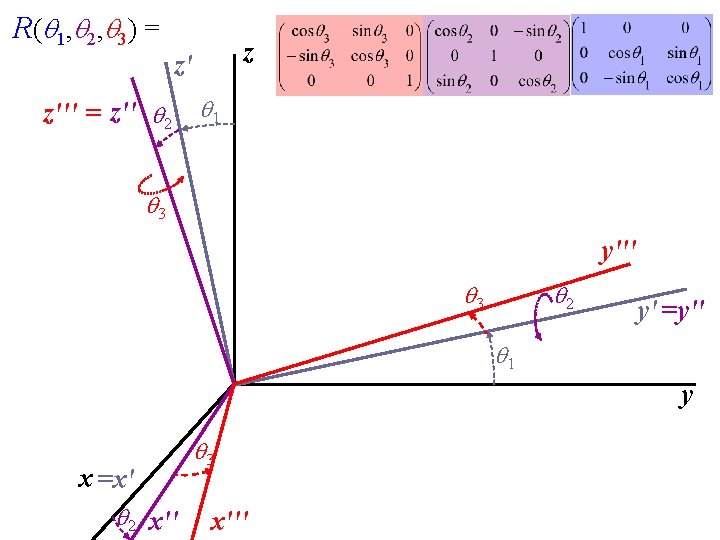
 = about x-axis about y′-axis z′′-axis 1 st 2 nd")
R( 1, 2, 3) = about x-axis about y′-axis z′′-axis 1 st 2 nd 3 rd These operators DO NOT COMMUTE! but as n n Recall: the “generators” of rotations are angular momentum operators and they don’t commute! Infinitesimal rotations DO commute!!
 = 1 3 0 - 3 1 0 0")
R( 1, 2, 3 ) = 1 3 0 - 3 1 0 0 0 1 1 0 - 1 1 0 1 = 1 3 - 2 - 3 1 0 2 0 1 1 0 0 0 1 1 0 - 1 1 1 3 0 - 3 1 0 - 2 0 1 1 2 - 1 1 or = 0 = 1 0 - 2 0 1 0 1 3 - 2 - 3 1 1 2 - 1 1 1
 = 1 3 - 2 - 3 1 1")
R( 1, 2, 3 ) = 1 3 - 2 - 3 1 1 2 - 1 1 1 R( 1, 2, 3 ) = + 2 3 R( 1, 2, 3 ) = If we imagine building up to full rotations by applying this repeatedly N times ℓim [R( 1, 2, 3 )]N N ℓim N
 ℓim N Which we can re-write in the form")
R( 1, 2, 3 ) ℓim N Which we can re-write in the form by slightly re-writing the “vector” components: Check THIS out: We have found a “new” representation of Lx , Ly , Lz!!

Our alternate approach to motivating where the generator was an honest-to-goodness matrix! gave representing 3 -dimensional rotations with the basis: A which we argue A B C satisifes all the same arithmetic as Lx, Ly, Lz

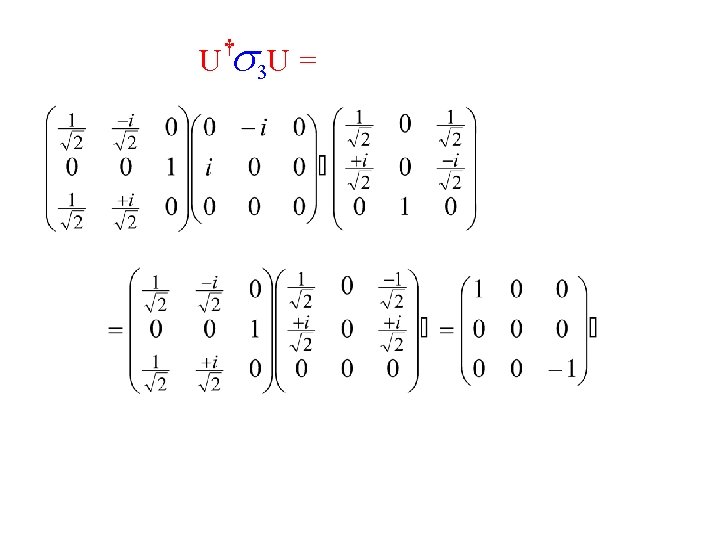
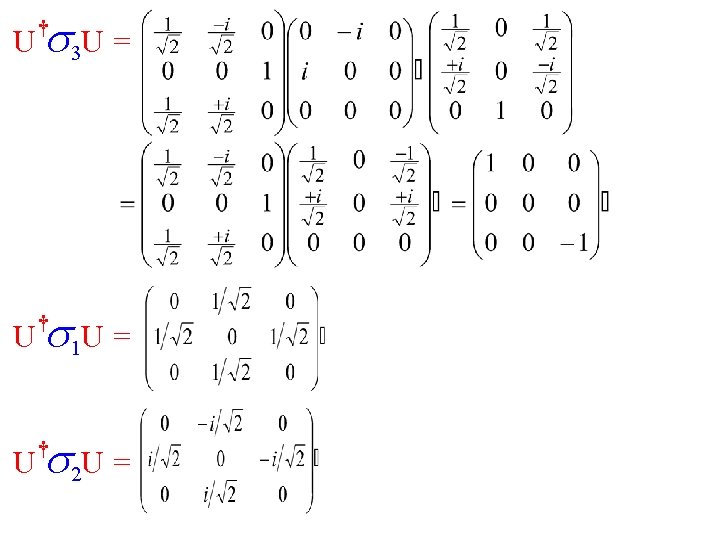
Notice can try diagonalizing the zth matrix: Eigenvalues of -1, 0, 1 We should be able to diagionalize s 3 by a SIMILARITY TRANSFORMATION! U 3 U = †

For J=1 states a matrix representation of the angular momentum operators

generates 3 -dimensional rotations and with the basis: And of course we already had and with the simpler basis: serve as the angular momentum operators!
![[ 1 2 - 2 1 ] = i 3 † † U [](http://slidetodoc.com/presentation_image_h2/4f00993d518b61df72001f3049c8c63e/image-12.jpg "[ 1 2 - 2 1 ] = i 3 † † U [")
[ 1 2 - 2 1 ] = i 3 † † U [ 1 2 - 2 1 ]U =U i 3 U † † † U 1 2 U- U 2 1 U = i. U 3 U † † † U 1 UU 2 U- U 2 UU 1 U = i. U 3 U Jx Since U † † U = UU = I Jx Jy- Jy Jx = i. Jz

This 6× 6 matrix also satisfies the same algebra: 0 0 0 0 0 0 , 0 0 0 0 3 -dimensional transformations (like rotations) are not limited to 3 -dimensional “representations” a b c x y z

Besides the infinite number of similarity transformations that could produce other 3× 3 matrix representations of this algebra
 = e- i. J· /ħ can take many forms The")
R ^ ( ) = e- i. J· /ħ can take many forms The 3 -dimensional representation in the orthonormal basis that diagonalizes z is the “DEFINING” representation of vector rotations

quarks leptons spin 12 p, : n, e, , , e , , , u, d, c, s, t, b the fundamental constituents of all matter! ms = ± 1 2 spin “up” spin “down” s = 32 ħ = 0. 866 ħ sz = |nlm>| 1 2 >= ( ) 1 0 1 2 ħ nlm “spinor” the most general state is a linear expansion in this 2 -dimensional basis set () () () = 1 + 0 0 1 with a 2 + b 2 = 1

obviously: How about the operators sx, sy ? eigenvalues of each are also ħ/2 but their matrices are not diagonal in this basis s- = 1ħ s- ħ s+ = 1ħ s+ ħ obviously work on the basis we’ve defined

You already know these as the Pauli matrices obeying the same commutation rule: but 2 -dimensionally! What if we used THESE as generators?

Should still describe “rotations”. Its 3 -components will still require 3 continuously variable independent parameters: x , y , z But this is not the defining representation and can not act on 3 -dimensional space vectors. These are operators that obviously act on the SPINORS (the SPIN space, not the 3 -dimensional wave functions.
 and vectors (3 -component)")
Spinors are 2 -component objects intermediate between scalars (1 -component) and vectors (3 -component) When we rotate the “coordinate system” scalars are unchanged. Vector components are mixed by the prescriptions we’ve outlined. What happens to SPINORS? actually can only act on the spinor part

The rotations on 3 -dim vector space involved ORTHOGONAL operators Rt = R-1 i. e. Rt. R = RRt = 1 These carry complex elements, so the R would not be orthogonal! As we will see later this is a UNITARY MATRIX of determinate = 1 Let’s stay with the simplified case of rotation = z^ (about the z-axis)
 +")
Notice: z z = and obviously: ( z z z = z ) + i z ( )
 1 0")
an operator analog to: ei = cos + isin ( ( ) 1 0 0 1 1 0 0 -1 ) Let’s look at a rotation of 2 (360 o) = -1 + 0 This means A 360 o rotation does not bring a spinor “full circle”. Its phase is changed by the rotation.

Limitations of Schrödinger’s Equation 1 -particle equation 2 -particle equation: mutual interaction But in many high energy reactions the number of particles is not conserved! n p+e++ e n+p+3 e-+ p + 6 + 3 g

Let’s expand the DEL operator from 3 - to 4 -dimensions i. e. lowered since operates on x then and as we’ve argued before, the starting point for a relativistic QM equation: The Klein-Gordon Equation or if you prefer:

But this equation has a drawback: Look at Schrödinger’s Equation for a free particle *( ) - ( )=0 The Continuity Equation probability density probability current density
 - ( ) * = 0 not")
starting from the Klein-Gordon Equation *( ) - ( ) * = 0 not positive definite The Klein-Gordon Equation is 2 nd order in t! Need to know initial (t=0) state as well as (0) much more complicated time evolution

We noted difficulties trying to work with: The Klein-Gordon Equation or if you prefer: stemming from the fact that its 2 nd order in t

In 1 -dim, might try factoring p 2 - m 2 c 2 = 0 (p + mc)(p - mc) = 0 two equations, 1 st order in t but can’t add a vector and scalar! If either bkpk+mc = 0 or g l pl-mc = 0, the Klein Gordon Equation is satisfied, and the relativistic energy-momentum relation automatically holds!

are all equal!

p 1, p 2, p 3 operators do commute! (It’s angular momentum operators which don’t!) For this factoring exercise to work, need (g 0)2 = 1 (g 1)2= -1 (g 0 g 1+g 1 g 0)=0
2 = 1 (g 1)2= -1")
For this factoring exercise to work, need (g 0)2 = 1 (g 1)2= -1 but if you naively choose g (g 0 g 1+g 1 g 0)=0 1 and g 1 = i then (g 0 g 1 + g 1 g 0 ) = i 0= More generally these g quantities must satisfy (g 0)2 = I (g )2= -I {g , g i } = (g g + g g ) = 2 g (anti-commute!) † they are all UNITARY: g g but not HERMITIAN: g g g 0 = † g g 0 =g † =I
 2 =")
Some g properties: {g , g } = (g ( g 0) 2 = I g + (g )2= -I i g g ) = 2 g (anti-commute!) † they are all UNITARY: g g but not HERMITIAN: g g g 0 for i=1, 2, 3 = † g g 0 =g =I † since: 0 0 g g = g 0(2 g 0 -g 0 g ) g 0 0 = 2 g g g - g g 0 2 0 2 ? ( ) for = 0 = 2 1 (g ) - (g ) = 2 - 1 1 0 0 2 2 ? ( ) for = 0 = 2 0 g g - (g ) = 0 --1 0 0 (g g g )g = 1 which means: g 0 g g 0 = (g 0)-1

Dirac discovered this could only be resolved with matrices of at least order 4× 4 g 0 = 1 0 0 0 0 -1 g 1 = I 0 gi = 0 -I 0 0 0 -1 0 0 si 0 1 0 0 0 g 2 = 0 0 0 -i 0 0 +i 0 -si 0 0 +i 0 0 -i 0 0 0 g 3 = 0 0 -1 0 0 1 1 0 0 -1 0 0

With now a 4 -element column matrix, for example with the basis: = 1 2 3 4 1 0 = 1 + 2 0 0 0 1 + 3 0 0 + 4 1 0 0 1 and Dirac’s equation is now a matrix equation a set of 4 simultaneous equations Although the columns above carry four components they are NOT 4 -vectors! They are “Dirac spinors” or “bi-spinors. ” does not act on them directly.

g 0 = 1 0 0 0 0 -1 g 1 = 0 0 0 -1 0 0 0 g 2 = 0 0 0 -i 0 0 +i 0 0 -i 0 0 0 g 3 = 0 0 -1 0 0 1 1 0 0 -1 0 0 g 0 = I 0 0 -I gi = 0 si -si 0 The block diagonal form suggests it may sometimes be simpler to work with the “reduced” notation of A = B where A = 1 2 B = 3 4
- Slides: 36