Prototype 2 nd order system Step response Step

/s")









 area e. g. ζ >")







- Slides: 23
Prototype 2 nd order system: Step response:
Step Response Specs & Parameters Settling time: = (3 or 4 or 5)/s
• All closed-loop poles must be strictly in the left half planes Transient dies away • Dominant poles: those which contribute the most to the transient • Typically have dominant pole pair – (complex conjugate) – Closest to jω-axis (i. e. the least negative) – Slowest to die away
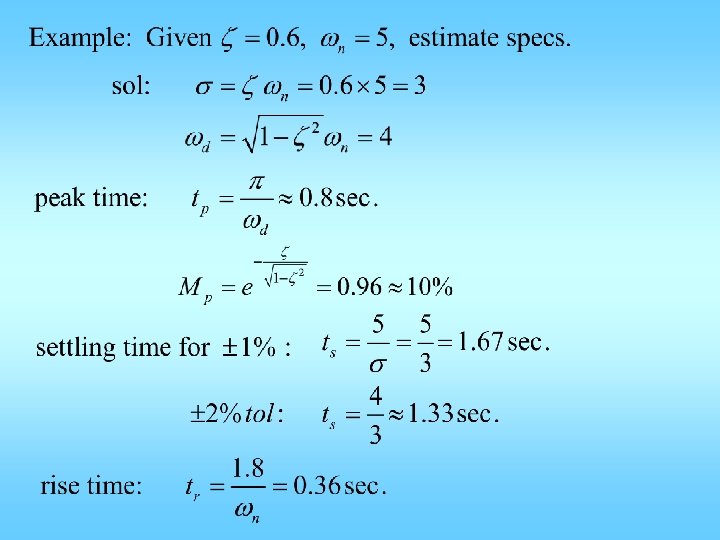
Typical design specifications • Steady-state: ess to step ≤ # % ts ≤ · · · • Speed (responsiveness) tr ≤ · · · td ≤ · · · • Relative stability Mp ≤ · · · %
These specs translate into requirements on ζ, ωn or on closed-loop pole location : Find ranges for ζ and ωn so that all 3 are satisfied.
Find conditions on σ and ωd.
In the complex plane :
Constant σ : vertical lines σ > # is half plane
Constant ωd : horizontal line ωd < · · · is a band ωd > · · · is the plane excluding band
Constant ωn : circles ωn < · · · inside of a circle ωn > · · · outside of a circle
Constant ζ : φ = cos-1ζ constant Constant ζ = ray from the origin ζ > · · · is the cone ζ < · · · is the other part
If more than one requirement, get the common (overlapped) area e. g. ζ > 0. 5, σ > 2, ωn > 3 gives Sometimes meeting two will also meet the third, but not always.
Try to remember these:
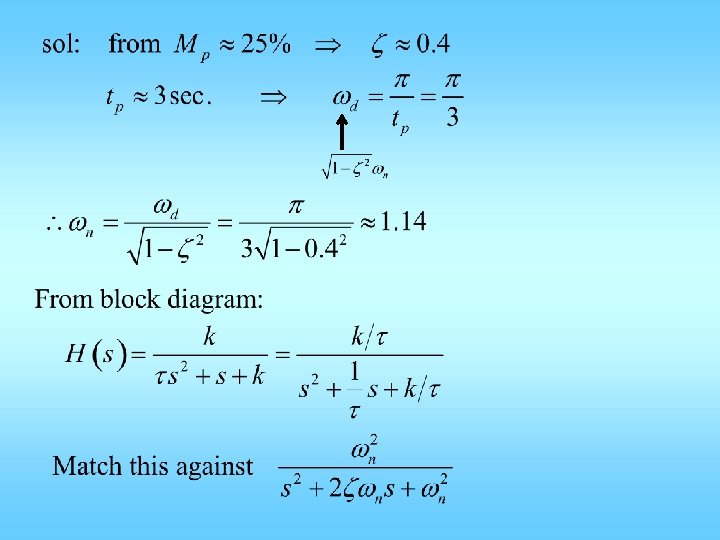
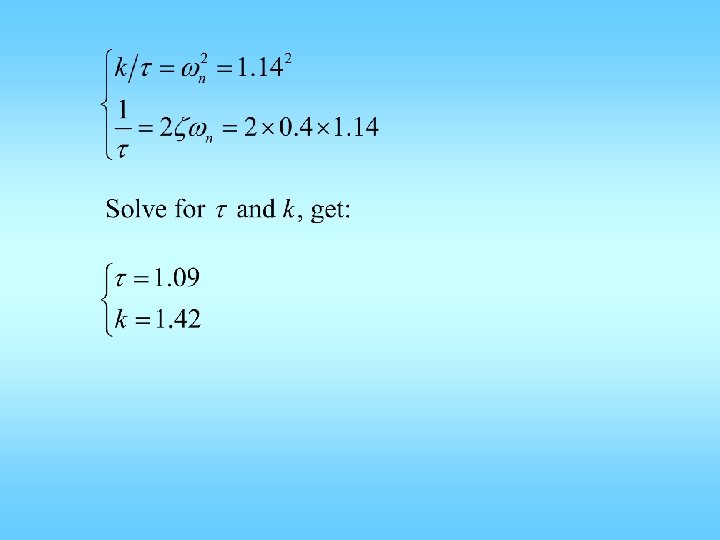
Example: + - When given unit step input, the output looks like: Q: estimate k and τ.
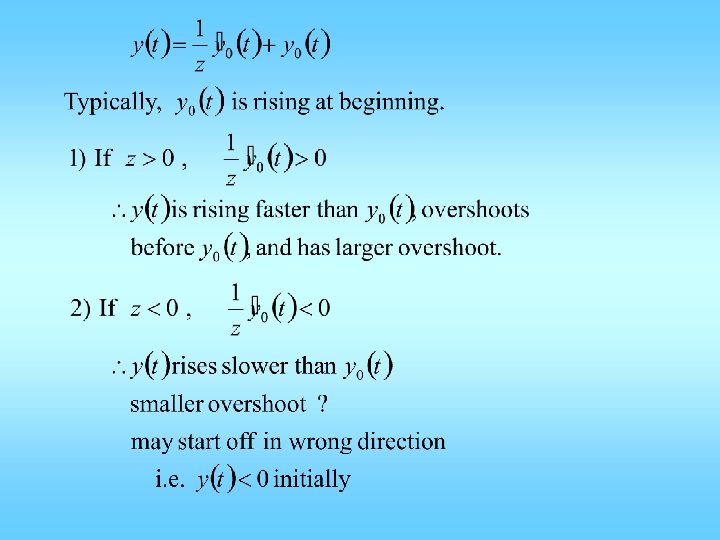
Effects of additional zeros Suppose we originally have: i. e. step response Now introduce a zero at s = -z The new step response:
Effects: • Increased speed, • Larger overshoot, • Might increase ts
When z < 0, the zero s = -z is > 0, is in the right half plane. Such a zero is called a nonminimum phase zero. A system with nonminimum phase zeros is called a nonminimum phase system. Nonminimum phase zero should be avoided in design. i. e. Do not introduce such a zero in your controller.
Effects of additional pole Suppose, instead of a zero, we introduce a pole at s = -p, i. e.
L. P. F. has smoothing effect, or averaging effect Effects: • Slower, • Reduced overshoot, • May increase or decrease ts