PROTESIS DE BRAZO BIOMEDICO PROYECTO INTEGRANTES Carlos Andrs

PROTESIS DE BRAZO BIOMEDICO PROYECTO

INTEGRANTES • • • -Carlos Andrés Ramires G -David Steven Orozco -Jorge Eduardo Giraldo V -Cesar Augusto Merchán V -Sebastián Alirio naranjo

• • • La prótesis de brazo biomédica se ideo con el propósito de reducir la discapacidad que adquieren las personas que han sido victimas de las minas antipersonal u otros desastres. El problema de las minas antipersonal existe en Colombia desde hace más de veinte años, sin embargo en los últimos 4 años, en vez de disminuir, ha aumentado de manera desproporcionada. De hecho, Colombia es el único país En América Latina y uno de los pocos en el mundo donde cada día se siembran Más minas antipersonal. Así, en el cuatrienio comprendido entre los años 1998 y 2001 ocurrieron en el país 274 accidentes con minas antipersonal, y en el siguiente cuatrienio comprendido entre los años 2002 y 2005 la cifra se elevó a 1. 829 accidentes, lo que significa un aumento de 568% en el número de accidentes en los últimos 8 años. Como podemos observar las minas antipersonal son un problema muy notorio en nuestro pais y no hay razon mas justificante para darse cuenta del por que elegimos esta idea, pues, es muy gratificante para nosotros como patriotas ayudar a esta poblacion tan vulnerable y tan marginada.

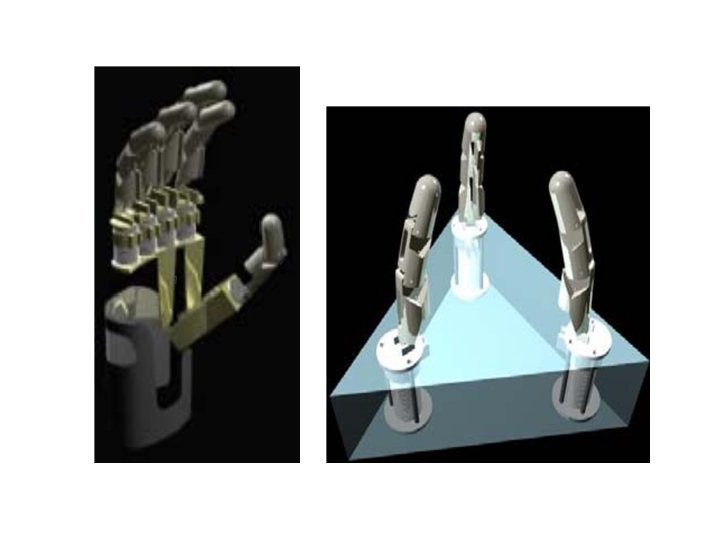
INDUCCION • Recientemente se han desarrollado estudios en la Universidad Militar Nueva Granada en el laboratorio de Robótica e Inteligencia artificial (LRIA) en donde se desarrolló una mano antropomórfica que imita los modelos prensiles humanos pero • cuyo inconveniente sigue siendo el elevado número de actuadotes utilizados y el costo para su implementación

LA MANO HUMANA • Como se observa, el dedo pulgar esta fijo por debajo de los otros dedos y puede realizar los movimientos de cierre y rotación, debido a la gran movilidad de su metacarpo. Esto permite variar la orientación del plano en que se desarrolla el movimiento de doblado y extensión del dedo pulgar, propiedad a través de la cual es posible oponer el dedo pulgar a los otros dedos. Con el término abducción se en tiende el movimiento de salida del dedo del eje del brazo. • • El movimiento de Extensión/Abducción es la capacidad de extensión del pulgar hacia la parte exterior y flexión hacia el interior de la palma. El término Oposición se define como la capacidad de unión de las puntas del pulgar y el meñique. La Aducción/Abducción es la capacidad de acercamiento y alejamiento del pulgar de la palma, cuando ambos se encuentran en un mismo plano.

DISEÑO DEDO ARTICULADO • Con base en estudios de la biomecánica de la mano y de sus medidas antropométricas, ver tabla 3. 1, para definir la cinemática este mecanismo articulado, cuyo tamaño y • movimientos de cierre son los más similares a los de un dedo humano. Para este estudio se ha utilizado las características • del dedo índice

• Simulaciones en Solid. Works® y Visual Nastran, han sido desarrolladas para comprobar que el movimiento de cierre sea apropiado y para comprobar que no hay interferencia mecánica, se muestra el prototipo construido en el laboratorio de procesos de mecanizado de la Universidad Tecnológica de Pereira con la característica de que el mecanismo es un mecanismo de barras y esta dentro de los eslabones como muestra la figura

• Para entender como funciona el mecanismo, se hace a continuación la clasificación de este en grupos de Assur com. se ve a continuación

• El actuado utilizado es de tipo rotacional, y se encuentra acoplado a un tornillo sin fin, permitiendo así la realización de un movimiento de tipo lineal, y por otro lado el movimiento general dedo, como se puede observar en la fig. 5, es realizado a través de un mecanismo de barras que esta inserido dentro de las falanges.

SISTEMA BIOLOGICO DEDO MECANICO • • Huesos Resina , compuestos plásticos Articulaciones Revolución Tendones Sistema palancas en acero Músculos Micro motor de CC

PRUEBAS Y RESULTADOS • Se realizó el análisis cinetostático de mecanismo del dedo robot. Para ello se recurre al análisis y síntesis de mecanismos por grupos de Assur. El análisis se inicia con la solución gráfica de las posiciones obtenidas con el mecanismo en un software CAD, se calcula manualmente las fuerzas y reacciones que se generan en cada junta y • posteriormente se implementa un programa de computador sobre la plataforma de Matlab V 7. 0 para la solución de las ecuaciones, luego se comparan los resultados obtenidos en forma gráfica y en forma manual, se obtuvo que error es mínimo (en torno de 0. 006%) lo que implica que las soluciones fueron aceptables

• Pruebas experimentales han sido desarrolladas con el prototipo. Para estas experiencias se han utilizado un instrumento virtual desarrollado sobre Lab. View para la generación de una señal de PWM 2 para control de velocidad y sentido de giro del actuados, además del instrumento virtual para la medición de fuerzas las cuales son registradas en los sensores (tipo Flexiforce 3) durante una prueba de contacto • Una secuencia de movimiento del dedo es mostrada en la Figura 7, donde son presentadas tres posiciones, superior, intermedia e inferior. En la Figura 8 son presentados resultados de simulación

• Los resultados obtenidos a través del software Matlab confirman la suposición de que las fuerzas son pequeñas comparadas con los cálculos estáticos realizados en forma manual para las diferentes posiciones del mecanismo. Para una rosca ACME se calcula la fuerza compensadora y a partir de esta fuerza son calculadas las otras fuerzas para cada uno de los pontos de la trayectoria • En la tabla 3. 3 son presentados los principales resultados obtenidos con ayuda de Matlab®, donde se puede verificar que la trayectoria de un determinado punto P, en el extremo del mecanismo, describe unas posiciones aceptables en relación al movimiento de un dedo humano, como por ejemplo, la velocidad que se obtuvo en forma experimental fue de 5 mm/s, y el resultado obtenido en simulación es de 4, 95 mm/

• Otra técnica para la simulación de mecanismo utilizada es por medio del toolbox de Matlab Simmechanics, la figura 9 muestra la referencia tenida en cuenta para el montaje. En la figura 10 se presenta la respectiva implementación • Referencia para el montaje en Simmechanics

CONCLUSIONES • A través del curso de este trabajo se plantearon las estrategias para la implementación de un dedo robótico para el desarrollo de grippers para aplicaciones industriales o para fines protésicos. La mayoría de los desafíos de la fabricación del dedo robot se presentaron debido a su forma de características antropomórficas. Esto hace difícil la manufactura de ciertas piezas, por ejemplo las • las barras de transmisión y los eslabones que conforman las falanges, pues estos deben cumplir con unas dimensiones particulares. Otro hecho importante es lograr que el dedo robot tenga otro grado de libertad en su base para lograr mayor destreza en la manipulación de objetos de geometrías complejas, y a la vez calcular las fuerzas que se generan en la nueva configuración

• El hecho de que el robot fue construido en forma manual significó demoras en la construcción final debido a los errores humanos inherentes en este tipo de trabajos. Pero también hay que resaltar que las formas logradas satisfacen las características antropométricas (forma, tamaño), variables a tener en cuenta. Ahora bien, es claro que las técnicas modernas para el maquinado de piezas complejas puede facilitar y minimizar muchos errores, por ejemplo empleando técnicas de CAD/CAM/CAE o estereolitografía
 para la fabricación de las falanges, tiene características")
• El material utilizado (Teflón) para la fabricación de las falanges, tiene características mecánicas aceptables, además de ser de bajo costo, lo que hace que sea tenido en cuenta en futuros diseños de bioingeniería. Este dedo robot facilitara la implementación de una mano completa la cual puede ser usada en aplicaciones de Inteligencia artificial con robots humano idees, obviamente incorporando algunas mejoras para dotar de sensores para la adquisición de diferentes sensaciones como • por ejemplo temperatura, para control dinámico del sistema en lazo cerrado. Un sensor, en detalle, se podría aplicar a todos los elementos constitutivos del dedo robot, por ejemplo una uña podría ser utilizada, como sus contrapartes biológicas, esta uña seria un transductor importante de la información con el cual es dedo robot podría raspar, cavar, y golpear ligeramente objetos, una propuesta se muestra en la figura

• Este tipo de trabajos requieren del uso de las diferentes teorías para el análisis y síntesis de mecanismos, y demuestra que la ingeniería puede tomar como fuente de inspiración la biomecánica para el desarrollo de nuevos sistemas que emulen el movimiento humano

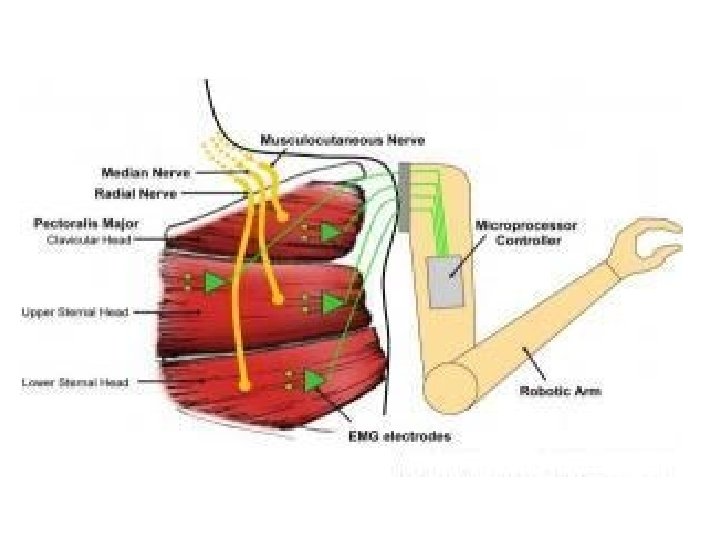
Científicos piensan en brazos robot controlables mediante nervios reconectados • Correcto, la idea no es nueva en su concepto básico, pero cuantos más ejemplos veamos, mejor. Un médico especialista del Instituto de Rehabilitación de Chicago y un profesor de la Universidad Northwestern han desarrollado una técnica que permite el uso de brazos artificiales únicamente con el pensamiento, igual que harías con uno de carne y hueso. • El proceso, llamado TMR (de targeted muscle reinnervation) funciona básicamente reconectando al pecho nervios residuales que en tiempos llevaban información en dirección a la extremidad amputada; cuando el usuario piensa en mover su brazo el músculo se contrae, y con la ayuda de un electromiograma (EMG) la señal es 'dirigida a un microprocesador en el brazo artificial que decodifica los datos y le dice al brazo qué hacer'. Actualmente solo es posible realizar cuatro movimientos con la tecnología disponible, aunque ya se están efectuando estudios para ver si se puede ampliar el dinamismo de las prótesis.

DISEÑO Y CONSTRUCCIÓN DE LA MANO ROBÓTICA Y GUANTE SENSORIZADO • Una vez entendidos los conceptos básicos necesarios para la realización de este proyecto, en este capítulo se describe la construcción tanto del guante sensorizado como de la mano robótica, así como todo el hardware necesario para realizar las tareas de control. En un inicio se trató de construir sensores fotoeléctricos basados en la percepción de una fuente luminosa n. • constante a través de un ducto elástico, con un LED en un extremo y una foto resistencia en el otro, pero, la implementación física en el guante era muy difícil e incómoda debido principalmente al espacio reducido que se tiene. Por lo tanto, se procedió a utilizar otro método mediante sensores infrarrojos de reflexión utilizados comúnmente en robots seguidores de línea. Su reducido tamaño y sencillez de acondicionamiento fueron factores claves para su selección

• Se utilizó conceptos muy generales en cuanto al diseño de la parte mecánica de la mano robótica, debido a que este proyecto está enfocado principalmente a las tareas y algoritmos de control de la misma. Para el diseño de la mano robótica se tomó como punto de referencia a la mano humana tomando en cuenta los siguientes conceptos. Debe ser auto-contenida; esto es, que la mano sea una pieza independiente. Debido a ello no posee tendones o elementos de transmisión externos a la propia mano. Además debe ser antropomorfa; esto es, debe tener la apariencia de una mano humana, se buscó un diseño con características antropomorfas. Por último las dimensiones deben ser lo más cercanas posibles a las de una mano humana. 26 Tomando en cuenta todos estos aspectos se procede a describir el diseño y la construcción de todo el hardware utilizado.

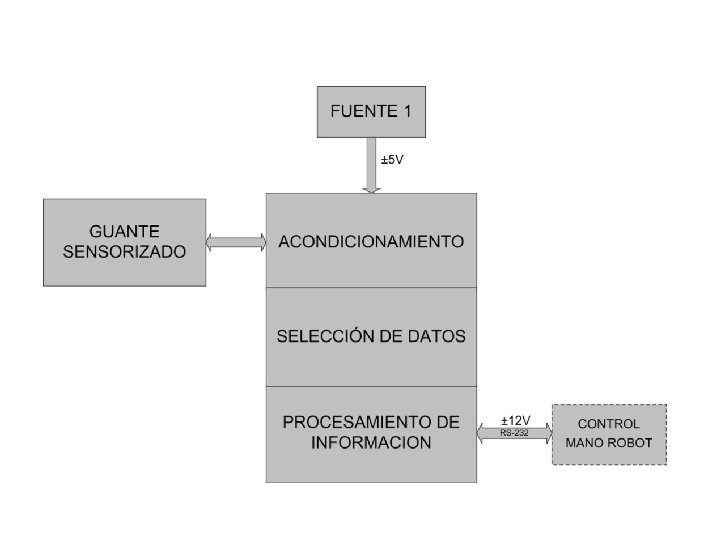
ARQUITECTURA DEL SISTEMA • El guante sensorizado es un elemento provisto con sensores fotoeléctricos, los cuales determinan la posición de las articulaciones de cada dedo de una mano diestra. Las señales de los sensores son acondicionadas, procesadas y transmitidas a través de una interface RS-232 cuando la etapa de control lo requiera. El hardware está formado por un guante diestro flexible, sobre el cual son montados estratégicamente los sensores fotoeléctricos. Son en total 15 sensores fotoeléctricos cuya salida acondicionada es un valor analógico y el elemento de control, del cual se tratará posteriormente, posee 5 entradas para la conversión A/D (analógica-digital); por ello fue necesario incluir una etapa de selección de datos, con ello, mediante un barrido de lectura de los sensores, una de las 15 entradas es conectada a una única entrada analógica del elemento de control para su conversión A/D. Una

• Una vez digitalizados los datos estos son procesados, almacenados y actualizados continuamente para ser transmitidos a través de una Interfase RS 232 cuando la etapa de control de la mano robótica los requiera. En la Figura 2. 1 se muestra un diagrama con la arquitectura del guante sensorizado.

GUANTE • Para el desarrollo del guante sensorizado se utilizó un guante diestro de la marca Merch. Pro modelo Wells Lamont #7707 M, el cual está confeccionado con 60% de nylon y 40% de poliuretano en la palma; y, 96% de poliéster y 4% de Spandex en el dorso. Se eligió este tipo de guante debido a la flexibilidad que se requiere. Este guante se lo puede observar en la Figura

DISEÑO DEL DISPOSITIVO FOTOELÉCTRICO SENSOR • El dispositivo fotoeléctrico sensor consta de un emisor-receptor de luz y un ducto elástico.

EMISOR-RECEPTOR DE LUZ • Se utilizó como dispositivo fotoeléctrico emisor-receptor de luz al circuito integrado SG 2 BC, el cual es un sensor óptico reflectivo; es decir, presenta una variación en su señal de salida por la menor o mayor reflexión de luz infrarroja emitida por una fuente de luz infrarroja constante. Su salida es de tipo transistor. • Para este proyecto se utilizan 15 sensores ópticos los cuales son ubicados estratégicamente en el guante sensor con el fin se sensar la flexión de cada una de las articulaciones. Cada uno de los sensores son conectados a una etapa de acondicionamiento

DUCTO ELÁSTICO • Para el presente proyecto se utilizo un ducto elástico de color negro debido a que se requiere evitar cualquier interferencia externa hacia el dispositivo sensor, así como cualquier fuga de luz hacia el exterior. Debido a que la fuente luminosa es constante, las paredes del ducto incrementan o decrementan el numero de rayos reflejados por las paredes hacia el receptor según el ángulo de flexión del ducto. Analizando las articulaciones de los dedos se llegó a la conclusión que la medida ideal del ducto es de 1 a 1. 5 cm. Siendo un total de 15 unidades.
- Slides: 30