PROGRAMACION DE ROBOTS AHDEMAR WILMER ZEGARRA FLORES RAUL

PROGRAMACION DE ROBOTS AHDEMAR WILMER ZEGARRA FLORES RAUL CONDORI YUCRA JUAN CARLOS GUTIERREZ CONDORI DANIEL MAMANI QUISPE YANNICK EVAL BERRIOS MARQUEZ

Un robot industrial es básicamente un manipulador multifuncional reprogramable, lo cual permite su adaptación de manera rápida y económica a diferentes aplicaciones.

MÉTODOS DE PROGRAMACIÓN Programar un robot consiste en indicar paso por paso las diferentes acciones (moverse a un punto, abrir o cerrar la pinza, etc. ) que éste deberá realizar durante su funcionamiento.

Un robot puede ser programado por: - Programación por guiado. - Programación Textual.

Programación por Guiado Pasivo: Guiado Pasivo Directo: Guiado Pasivo por Maniquí:

Guiado Activo: Guiado Básico: Guiado Extendido:

2. Programación Textual Nivel Robot Nivel Objeto Nivel Tarea

Nivel Robot:

Nivel Robot: Mover_a P 1 via P 2 Vel = 0. 2 * VELMAX Pinza = ABRIR Prec = ALTA Mover_recta_a P 3 Pinza = CERRAR Espera= 0. 5 Mover_recta_a P 1 Prec = MEDIA Vel = VELMAX mover_a P 4 via P 2 Prec = ALTA Vel = 0. 2 * VELMAX Mover_recta_a P 5 Pinza = ABRIR ; Situarse en un punto sobre la pieza B ; Reducir la velocidad ; Abrir la pinza ; Aumentar la precisión ; Descender verticalmente en línea recta ; Cerrar la pinza para coger la pieza B ; Esperar para garantizar cierre de pinza ; Ascender verticalmente en longa recta ; Decrementar la precisión ; Aumentar la velocidad ; Situarse sobre la pieza C ; Aumentar la precisión ; Reducir velocidad ; Descender verticalmente en línea recta ; Abrir pinza

Nivel Objeto: Situar B sobre C haciendo coincidir LADO_B 1 con LADO_C 1 y LADO_B 2 con LADO_C 2 ; Situar A dentro D haciendo coincidir EJE_A con EJE_HUECO_ y BASE_A con BASE_D ; Nivel Tarea: Ensamblar A con D

Métodos de Programación de Robots

REQUERIMIENTOS DE UN SISTEMA DE PROGRAMACIÓN DE ROBOTS • Entorno de programación. • Modelado del entorno. • Tipo de datos. • Manejo de entradas/salidas (digital y analógica). • Control de movimiento. • Control del flujo de ejecución del programa.

Entorno de programación • Contar con un entorno de programación adecuado a las necesidades. • Programar las acciones de un manipulador es complicado. • Presente una buena capacidad de depuración y de ejecución paso a paso.

Modelado del entorno • El modelo del entorno es la representación que tiene el robot de los objetos con los que interacciona. • Los modelos se limita a características geométricas: posición y orientación de los objetos, y en ocasiones a su forma, dimensiones, peso, etc.

Tipos de datos • Tipo de dato lógico • Tipo de dato entero • Tipo de dato carácter • Cadena de caracteres

MANEJOS DE ENTRADAS Y SALIDAS Todo esto es posible gracias a las señales binarias de entrada y salida

SISTEMAS AUTOMÁTICAS sensores


DESARROLLO GRACIAS A UN SENSOR Modificar la trayectoria
")
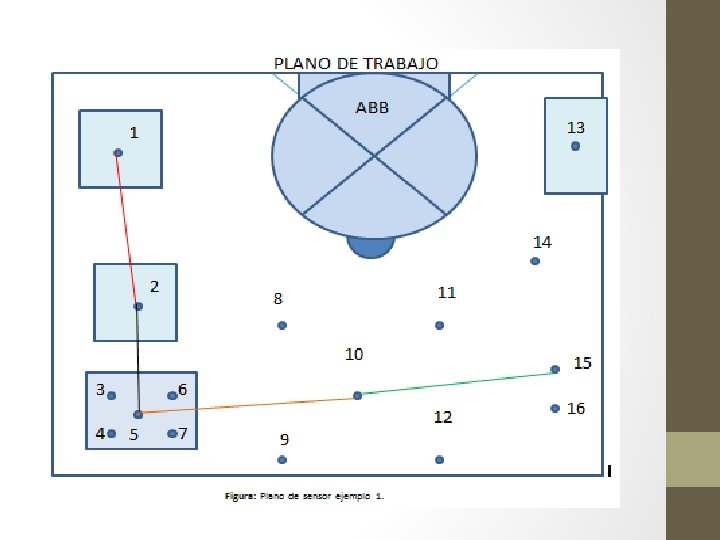
CONTROL DE MOVIMIENTO DEL ROBOT Sensores (horizontal)
")
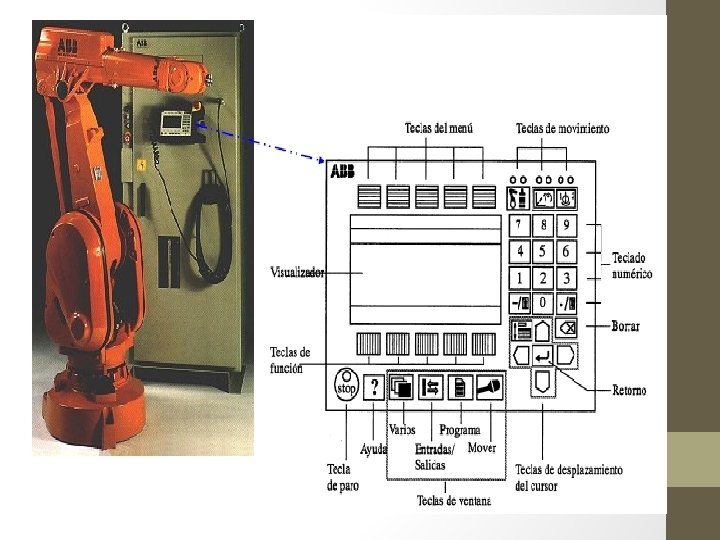
ROBOTS ABB • RAPID: (Robotics Application Programming Iterative dialogue)

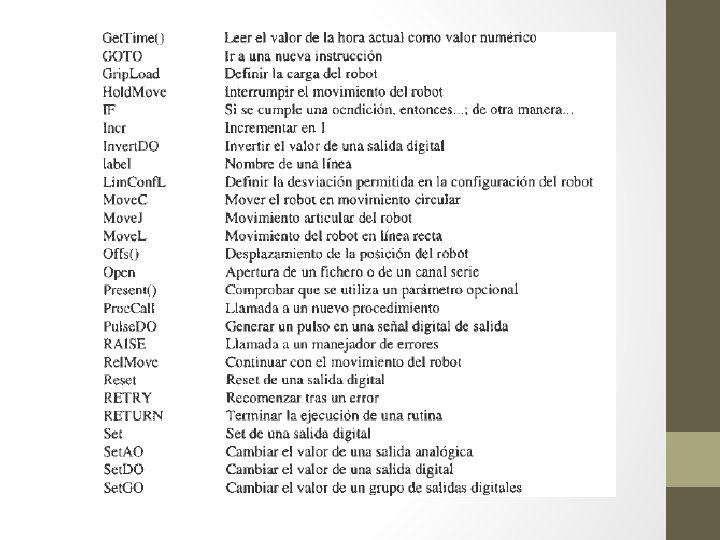
INSTRUCCIONES DE RAPID

INSTRUCCIONES DE MOVIMIENTO • • Move. L: desplazamiento hasta el punto en línea recta.

TABLA DE PUNTOS A RECORRER


• • Move. C: desplazamiento describiendo un círculo. • Move. C p 1, p 2, v 100, z 30, tool 1

• • Move. J: desplazamiento rápido, sin garantizar la trayectoria seguida (sin coordinación de velocidad entre los ejes del

LENGUAJE C

Lenguajes de programación de robots • Consisten en series de comandos que indican al robot las acciones a llevar a cabo • En programación de robots se emplean técnicas de flujos de datos y secuencias de funciones • No existe un estándar de lenguaje programación debido a sus características propietarias

VAL • Acrónimo de Variable Assembly Language • Desarrollado para robots de Unimation Inc. Utilizado por Adept Technology y Stäubli. • Es un sistema en tiempo real • Consiste en 3 modulos: • Monitor • Editor • Location

Programa de ejemplo en VAL para Pick&Place PROGRAM PICKPLACE 1. MOVE P 1 2. MOVE P 2 3. MOVE P 3 4. CLOSEI 0. 00 5. MOVE P 4 6. MOVE P 5 7. OPENI 0. 00 8. MOVE P 1. END

RAPID • Acrónimo de Robotics Application Programming Interactive Dialogue • Lenguaje de programación desarrollado por la empresa ABB • Sus programas consisten de tres partes • Rutina principal MAIN • Conjunto de subrutinas • Datos del programa (Variables)
 • No cambian nunca su valor • Variables")
Datos en RAPID • Constantes (CONS) • No cambian nunca su valor • Variables (VAR) • Pueden cambiar su valor en cualquier momento • Persistentes (PERS) • Pueden cambiar su valor en cualquier momento pero pueden retenerlo entre varias ejecuciones • Registros • Almacenan más de un tipo de dato a la vez, son similares a las estructuras (struct) en lenguaje C

• Atómicos • num • bool • string • pos • orient • pose • confdata

Palabras reservadas de RAPID

Programa de ejemplo en RAPID

V+ • Es un lenguaje de programación para robots desarrollado en 1989 por Adept Technology • Consiste en una serie de líneas o STEP que se interpretan como instrucciones del programa • Permite la ejecución de múltiples tareas y permite llamadas asíncronas de función

• En V+ el acceso a los tipos de datos se da de tres formas • Global • Local • Automatico

OROCOS • Acrónimo de Open Robot Control Software • Es un proyecto de software libre que provee un entorno para el manejo de brazos robot y maquinas herramienta • Compuesto de librerías de software: • KDL (Kinematics and Dynamics Library) • BFL (Bayesian Filtering Library) • http: //www. orocos. org
- Slides: 42