Podstawy Fizyki Wykad 2 Opis ruchu Czym jest


 geometrycznych własności ruchu ciał bez uwzględnienia ich cech fizycznych")




 yp zp O")







 nazywamy linię zakreślaną przez cząstkę podczas ruchu Równanie toru Wektorowe równanie")

 r 2(t+ t)")
 r 3 z P P 3 r 2 P 2 r")






 t ( a v 0 s")





, a prędkość kątową.")
 e at r v Okres – czas potrzebny na przebycie")



- Slides: 37
Podstawy Fizyki Wykład 2 Opis ruchu
Czym jest mechanika? Mechanika jest działem fizyki zajmującym się opisem ruchu i odkształceń ciał materialnych na skutek ich wzajemnych oddziaływań. Mechanika bada też stan równowagi pomiędzy ciałami materialnymi. Mechanikę dzielimy na: • kinematykę, • dynamikę. 2
Kinematyka zajmuje się badaniem (opisem) geometrycznych własności ruchu ciał bez uwzględnienia ich cech fizycznych oraz działających na nie sił. Dynamika zajmuje się opisem ruchu ciał materialnych pod wpływem działających na nie sił. 3
Układ odniesienia, układy współrzędnych Układem odniesienia nazywamy ciało lub układ ciał, względem którego dokonujemy określenia położenia innych ciał. Jeżeli położenie badanego ciała zmienia się w czasie względem układu odniesienia, mówimy że ciało to jest w ruchu względem tego układu. Jeżeli położenie badanego ciała nie zmienia się w czasie względem układu odniesienia, mówimy że ciało to jest w spoczynku względem tego układu. 4
Wybór układu odniesienia jest koniecznym warunkiem opisu ruchu lub spoczynku ciała. Zarówno ruch jak i spoczynek są pojęciami względnymi. Przejście od opisu ruchu w jednym układzie odniesienia do opisu tego ruchu w innym układzie jest możliwe dzięki zastosowaniu tzw. transformacji współrzędnych. 5
Z ciałami będącymi układem odniesienia bardzo często wiążemy układ współrzędnych. W zagadnieniach mechaniki bardzo często stosujemy kartezjański (prostoliniowy) układ współrzędnych prostokątnych. Inne układy współrzędnych to m. in. : • układ sferyczny; • układ cylindryczny. 6
Inne układy współrzędnych: Układ sferyczny Układ cylindryczny 7
Opis punktu w kartezjańskim układzie współrzędnych y P P(xp, yp, zp) yp zp O xp x z 8
W mechanice bardzo często stosuje się uproszczenie polegające na zastąpieniu ciał rozciągłych przez punkty. Wiąże się to z tym, że położenie punktu możemy opisać najprościej, tzn. podając tylko trzy jego współrzędne. Punktem materialnym nazywamy ciało obdarzone masą, ale mające rozmiary tak małe, że jego położenie można opisać bez znaczącego błędu jako położenie punktu geometrycznego. 9
Pojęcie punktu materialnego jest pojęciem względnym. I tak np. przy opisie ruchu samochodu podczas wjazdu „do koperty”, nie możemy traktować go jako punkt materialny. Możemy natomiast tak postąpić przy opisie jego ruchu z Rzeszowa do Gdańska. Ciała rzeczywiste nie są punktami. Dla ruchu translacyjnego (postępowego) ciała można założyć, że odpowiada mu punkt materialny będący cząstką o masie równej masie obiektu umieszczonej w centrum jego masy. 10
Położenie i tor ciała Obierając konkretny układ współrzędnych obserwator może opisać jednoznacznie położenie badanego punktu materialnego wprowadzając tzw. wektor położenia (wektor promienia wodzącego), którego początek znajduje się w początku układu współrzędnych a koniec w badanym punkcie. Promień wodzący można określić matematycznie w różny sposób. 11
y P r O x z 12
Ruch ciała – jest to wzajemne przemieszczenie się w przestrzeni w miarę upływu czasu, jednych ciał względem drugich. Ruch jest zjawiskiem względnym. Opisujemy go podając położenie ciała w każdej chwili czasu względem ciała (układu) odniesienia Torem – nazywamy krzywą lub prostą utworzoną przez punkty określające kolejne położenia ciała w przestrzeni r(t) y O x
Położenie punku materialnego Jeżeli w odpowiednim układzie współrzędnych chcemy podać położenie punktu to możemy to uczynić definiując tzw. wektor wodzący, albo też wektor położenia. Układ kartezjański z P r O z y x x y
Przemieszczenie z → r 12 Położenie początkowe → r 2 → r 1 Położenie końcowe Przemieszczenie → r(t) y x Interwał przestrzenny Przemieszczenie elementarne
Tor Torem (trajektorią) nazywamy linię zakreślaną przez cząstkę podczas ruchu Równanie toru Wektorowe równanie toru Parametryczne równanie toru Postać jawna równania toru → r(t)
Droga Drogą nazywamy długość przebytego przez cząstkę odcinka toru 12 s 12 → r 2 Dla współrzędnych kartezjańskich
Prędkość średnia Średnią prędkością nazywamy wektor zdefiniowany następująco: r r 1(t) r 2(t+ t) Kierunek tej prędkości jest zgodny z kierunkiem wektora r.
Prędkość (prędkość chwilowa) r 3 z P P 3 r 2 P 2 r r 3 r 2 r 1 P 1 r 1 y x
Dodawanie prędkości z z’ prędkość unoszenia → r’ → r y y’ x → r 0 x’
Przyspieszenie średnie v 1 z P 1 P 2 tor r 1 v 2 v y x Średnie przyśpieszenie definiujemy jako:
Przyspieszenie W kartezjańskim układzie współrzędnych możemy napisać wektor przyśpieszenia jako sumę jego składowych:
Przyspieszenie styczne i normalne Wiemy, że więc stąd Co daje at przyspieszenie styczne przyspieszenie normalne an a
Ruch jednostajny, jest to taki ruch, w którym prędkość jest stała x x=x 0 + t 0) t ( v x 0 t
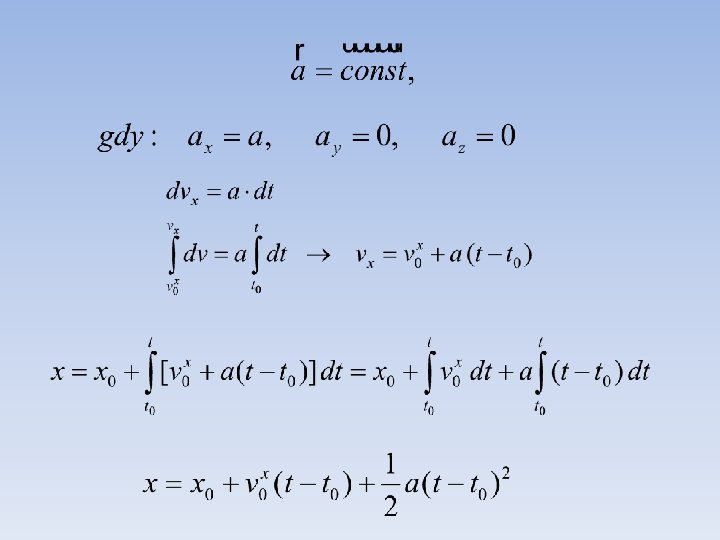
Ruch jednostajnie zmienny jest to ruch ze stałym przyśpieszeniem a = const 0. gdy a > 0 ruch nazywamy przyśpieszonym, gdy a < 0 ruch jest opóźniony.
v + v 0 v= a t 0) t ( a v 0 s t 0 a(t-t 0) t t t 0 t t
Rzut ukośny y g v 0 ymax x Składowe prędkości początkowej wynoszą: Składowe przyspieszenia:
vz z vz v v vx vx g g v vx vz vx v g g x
Zależność prędkości od czasu Parametryczne równanie toru
Rzut ukośny charakteryzują następujące wielkości: 1. 2. Zasięg rzutu, Maksymalna wysokość Zasięg rzutu otrzymamy licząc odległość poziomą x dla y=0. Maksymalna wysokość ciała poruszającego się rzutem ukośnym wynosi: Czas trwania rzutu:
Ruch po okręgu jest szczególnym przypadkiem płaskiego ruchu krzywoliniowego gdzie r = const y Ruch ciała określony jest przez funkcję = (t), definiująca tzw. drogę kątową. r s x Przebyta droga jest równa (def. kąta płaskiego):
Różniczkując drogę s po czasie, otrzymujemy; v oznacza prędkość liniową (transwersalną), a prędkość kątową. Jednostką prędkości kątowej jest s-1. Jeżeli prędkość kątowa =const ruch po okręgu nazywamy jednostajnym. Różniczkując prędkość v po czasie, otrzymujemy; at an Gdzie at jest liniowym przyśpieszeniem stycznym, a e nazywamy przyśpieszeniem kątowym. r a
Zależności wektorowe (informacje dodatkowe) e at r v Okres – czas potrzebny na przebycie drogi kątowej f=2 p w ruchu jednostajnym po okregu gdzie częstość jest równa:
Określanie zwrotu prędkości i przyspieszenia kątowego
Porównanie wielkości liniowych i kątowych kątowe liniowe x = rf v = r at = er
klasyfikacja ruchów