Pocket Milling Machine Ultrahigh speed micro milling machine






- Slides: 9
Pocket Milling Machine Ultra-high speed micro milling machine
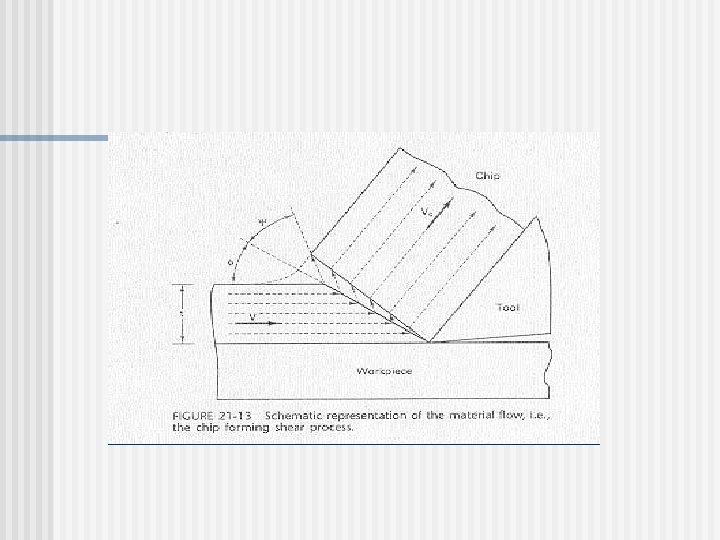
Motivation n A means to build micro structures using conventional machining techniques Portable machine tool Applications - milling microfluidic circuits ranging from 50 microns and above with varied channel geometries in a varity of materials
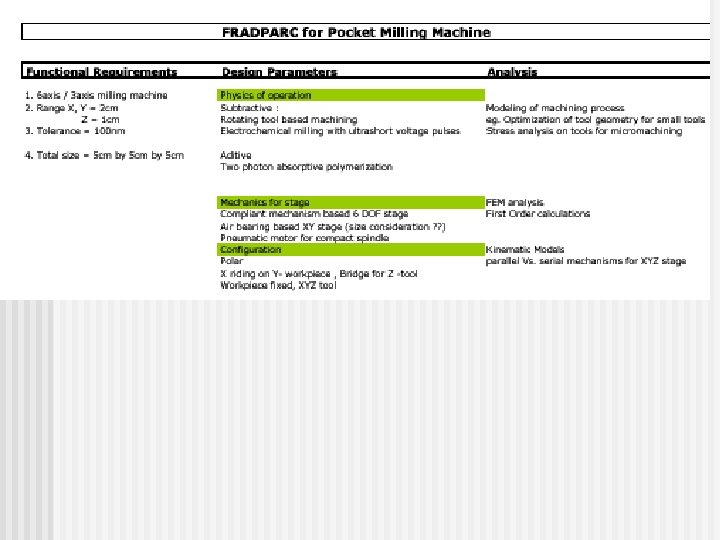
Functional Requirements n Precision XYZ micro-manipulator Range : 20 mm by 20 mm by 10 mm n Resolution : sub-micron (100 nm) n High stiffness in Z n Close loop control n High speed machine spindle (data point - a dentist drill runs at 300, 000 rpm) n n Small “pocket” size
Modules Micro-manipulation XYZ 3 DOF Stage High speed spindle design for very high rpm Focused-Ion beam milled micro tools, with specific geometries Controls - end point close loop control
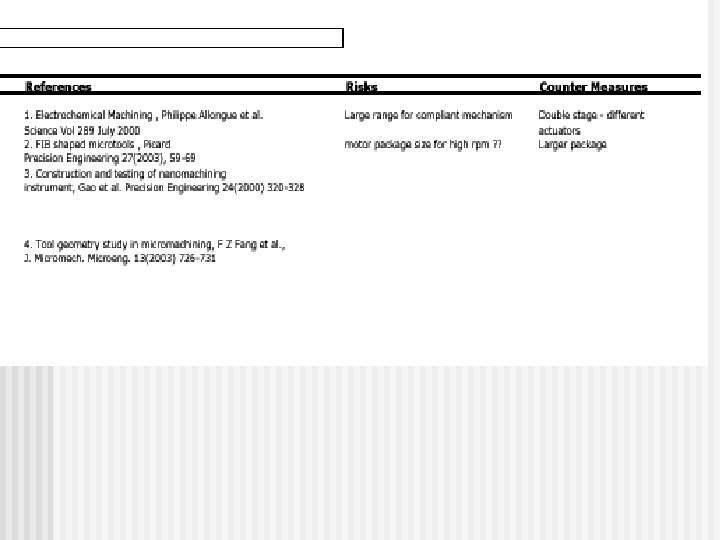
Strategies - XYZ stage Functional Requirements DP’s Analysis Serial n Motion amp. n Flexures, Piezos n n 3 – axis n Large stroke n nm- resolution (100 nm) Parallel n Motion amp. n Flexures, Piezos n Hybrid n Motion amp. n Flexures, Piezos n Kinematics n FEA n Modal analysis n Measured range CMM n Risks Serial n Large package n Errors accumulate n High inertia Parallel n Coupled motion n Control difficult Motion amp nunreasonable size n low stiffness Countermeasures
Concept - Low profile compliant mechanism based Z stages n Dobule loop bridge type hinge actuator n n Reported amplification = 30 Buckling sheet Z stage n Low Z stiffness in the structure