Pico Blaze2 JUMP aaa JUMP Z aaa JUMP
 --程序控制组 JUMP aaa JUMP Z, aaa JUMP NZ, aaa JUMP C, aaa")
Pico. Blaze指令集(需要2个周期) --程序控制组 JUMP aaa JUMP Z, aaa JUMP NZ, aaa JUMP C, aaa JUMP NC, aaa CALL Z, aaa CALL NZ, aaa CALL C, aaa CALL NC, aaa RETURN Z RETURN NZ RETURN C RETURN NC
 --逻辑组 --算术运算组 LOAD s. X, kk AND s. X, kk OR s.")
Pico. Blaze指令集(需要2个周期) --逻辑组 --算术运算组 LOAD s. X, kk AND s. X, kk OR s. X, kk XOR s. X, kk TEST s. X, kk ADDCY s. X, kk SUBCY s. X, kk COMPARE s. X, kk LOAD s. X, s. Y AND s. X, s. Y OR s. X, s. Y XOR s. X, s. Y TEST s. X, s. Y ADDCY s. X, s. Y SUBCY s. X, Sy COMPARE s. X, s. Y
 --中断组 RETURNI ENABLE RETURNI DISABLE ENABLE INTERRUPT DISABLE INTERRUPT --存储组 STORE s.")
Pico. Blaze指令集(需要2个周期) --中断组 RETURNI ENABLE RETURNI DISABLE ENABLE INTERRUPT DISABLE INTERRUPT --存储组 STORE s. X, ss STORE s. X, (s. Y) FETCH s. X, ss FETCH s. X, (s. Y)
 --移位和旋转组 SR 0 s. X SR 1 s. X SRX s. X")
Pico. Blaze指令集(需要2个周期) --移位和旋转组 SR 0 s. X SR 1 s. X SRX s. X SRA s. X RR s. X SL 0 s. X SL 1 s. X SLX s. X SLA s. X RL s. X --输入/输出组 INPUT s. X, pp INPUT s. X, (s. Y) OUTPUT s. X, pp OUTPUT s. X, (s. Y)

Pico. Blaze指令集详解 --JUMP

Pico. Blaze指令集详解 --CALL

Pico. Blaze指令集详解 --RETURN

Pico. Blaze指令集详解 --RETURNI

Pico. Blaze指令集详解 --LOAD

Pico. Blaze指令集详解 --AND

Pico. Blaze指令集详解 --TEST

Pico. Blaze指令集详解 --ADDCY

Pico. Blaze指令集详解 --COMPARE

Pico. Blaze指令集详解 --SR 0, SR 1, SRX, SRA, RR

Pico. Blaze指令集详解 --SL 0, SL 1, SLX, SLA, RL

Pico. Blaze指令集详解 --INPUT/OUTPUT

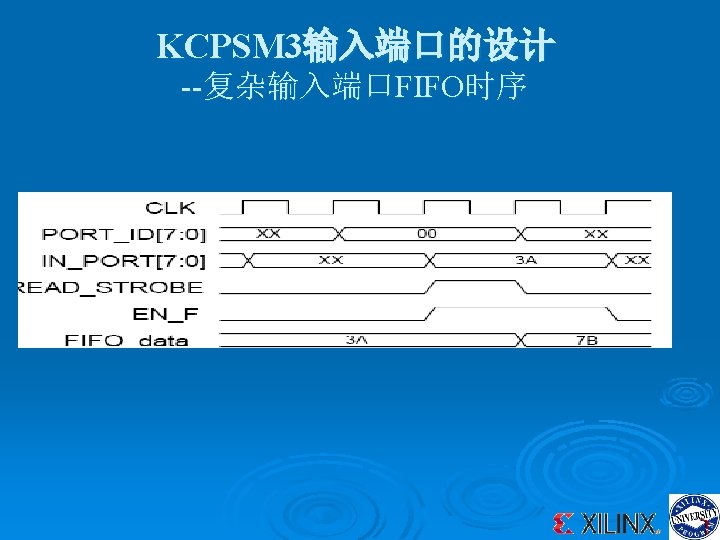
Pico. Blaze指令集详解 --INPUT/OUTPUT时序

Pico. Blaze指令集详解 --RESET

Pico. Blaze指令集详解 --STORE

Pico. Blaze指令集详解 --FETCH

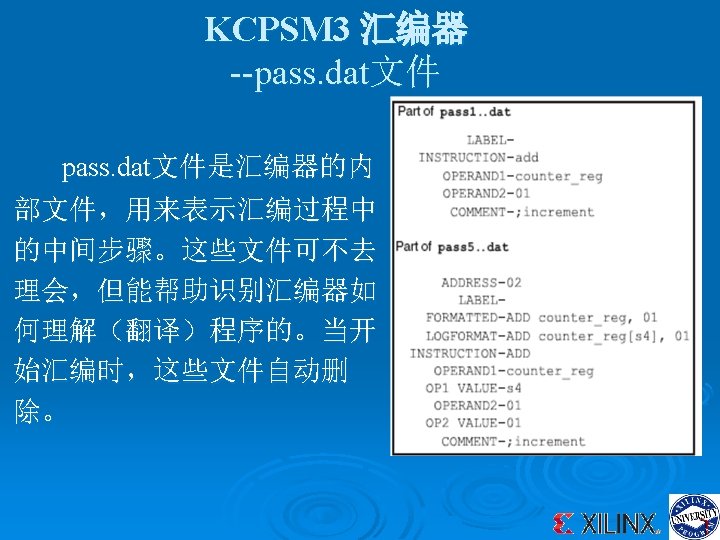
KCPSM 3 汇编器 --ROM_form. coe
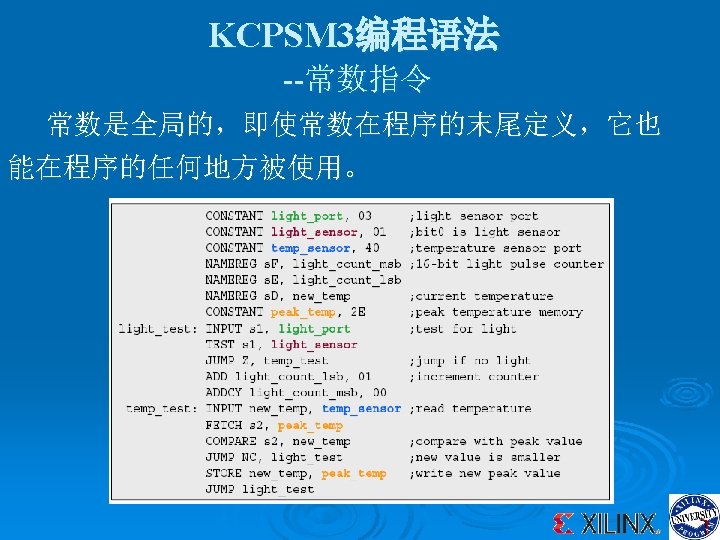

KCPSM 3编程语法 --NAMEREG 指令
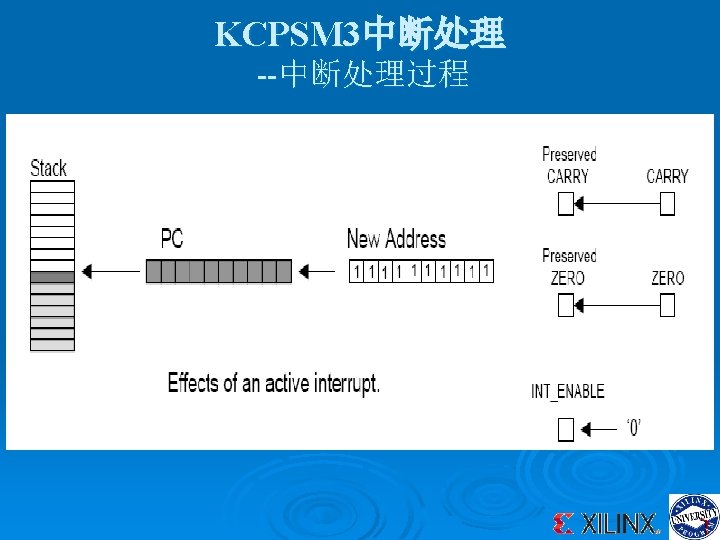
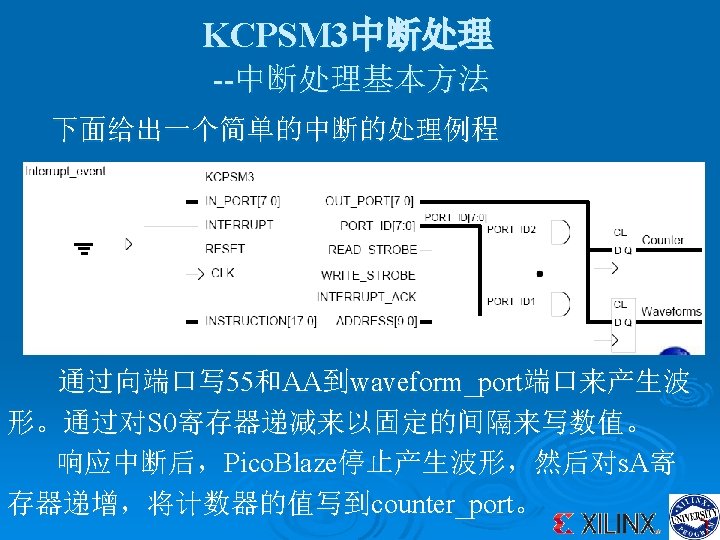
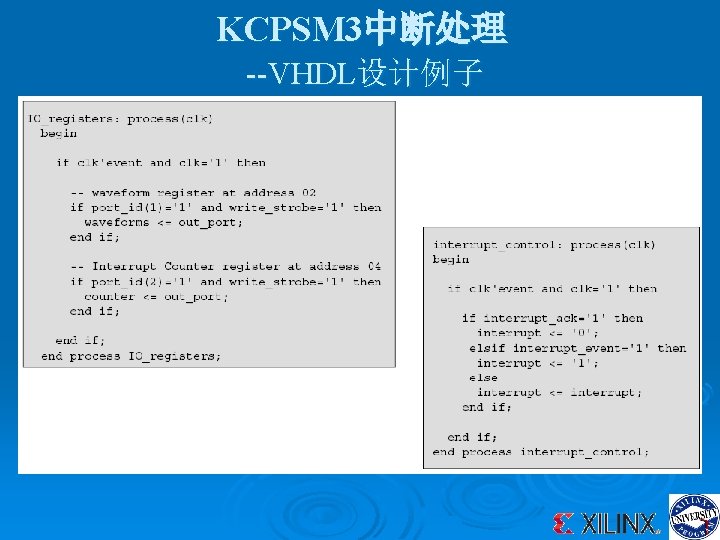

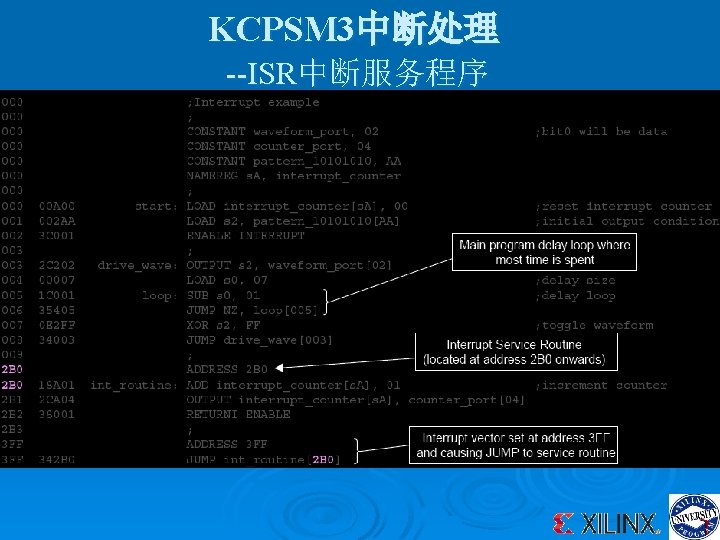
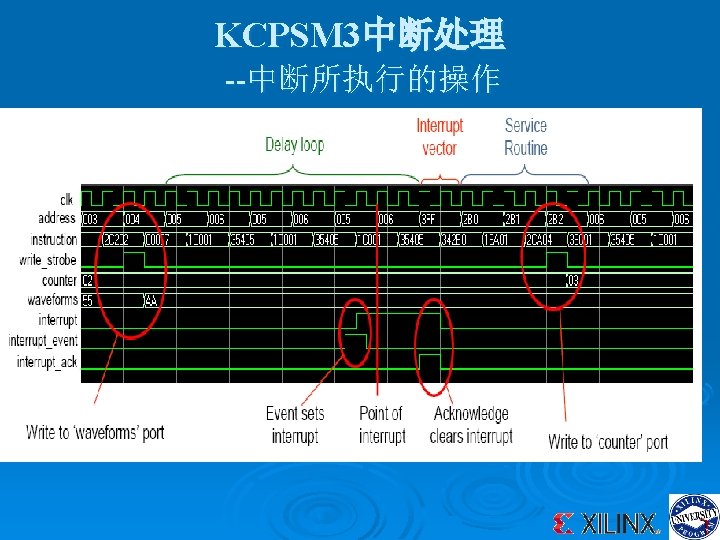
KCPSM 3中断处理 --中断服务程序 ; Interrupt example ; CONSTANT waveform_port, 02 ; bit 0 will be data CONSTANT counter_port, 04 CONSTANT pattern_1010, AA NAMEREG s. A, interrupt_counter ; start: LOAD interrupt_counter, 00 ; reset interrupt counter LOAD s 2, pattern_1010 ; initial output condition ENABLE INTERRUPT ; drive_wave: OUTPUT s 2, waveform_port LOAD s 0, 07 ; delay size loop: SUB s 0, 01 ; delay loop JUMP NZ, loop XOR s 2, FF ; toggle waveform JUMP drive_wave ; ADDRESS 2 B 0 int_routine: ADD interrupt_counter, 01 ; increment counter OUTPUT interrupt_counter, counter_port RETURNI ENABLE ; ADDRESS 3 FF ; set interrupt vector JUMP int_routine
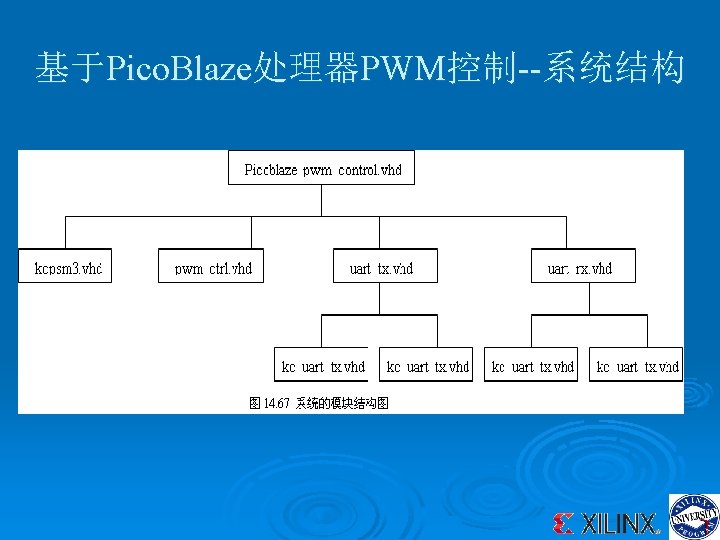
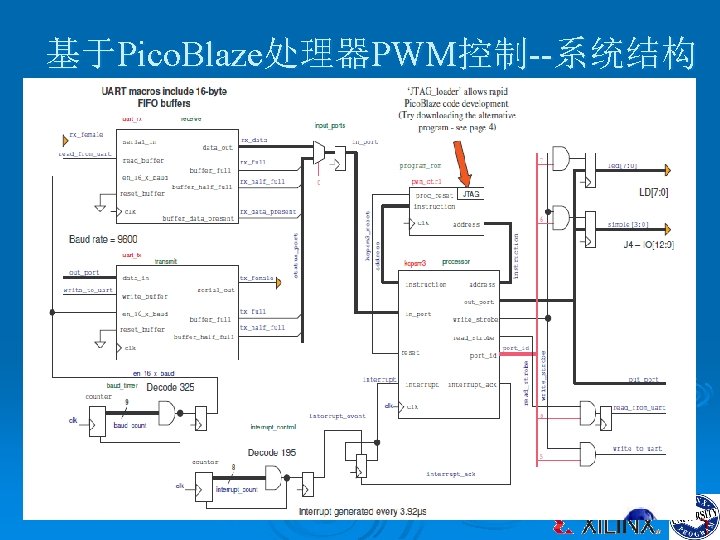
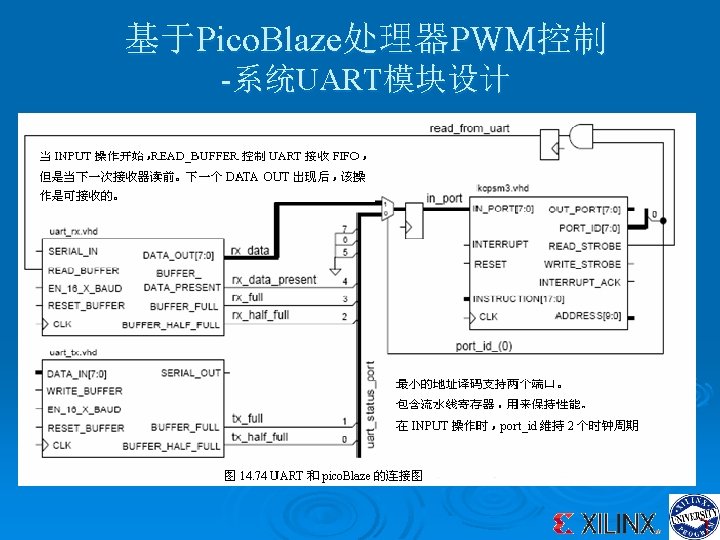

基于Pico. Blaze处理器PWM控制 -系统UART模块设计 UART模块的发送和接收状态各个位生成状态端口 status_port,该端口包含rx_full、rx_half_full、 rx_data_present、tx_full和tx_half_full状态位。
- Slides: 110