Pendahuluan Dalam pembahasan sebelumnya kita telah mengembangkan kriteria
 root locus,")
Pendahuluan Dalam pembahasan sebelumnya kita telah mengembangkan kriteria sudut dan penguatan (gain) root locus, keadaan-keadaan spesifik root locus yang memungkinkan kita untuk mendefinisikan 5 aturan sederhana untuk membuat sketsa root locus dengan memberikan pengetahuan mengenai poles dan zeros lup terbuka dari suatu sistem kontrol. Dalam pembahasan ini kita menggarisbawahi beberapa aturan lagi yang memungkinkan untuk memperhalus sketsa sehingga kita dapat secara akurat menentukan titik-titik break-in dan break-out yang terjadi di sumbu riil, dan di mana root locus memotong sumbu imajiner. Aturan-aturan untuk membuat sketsa lebih akurat, seperti sudut-sudut keberangkatan (departure) dari suatu pole kompleks dan tiba (arrival) di suatu zero kompleks disebutkan tetapi tidak didefinisikan. Sebagaimana kita tertarik dalam penggunaan root locus untuk analisis maka kita menguji bagaimana root locus dapat dikalibrasikan dan bagaimana ia dapat digunakan untuk kompensasi faktor penguatan (gain).

9. 4 Memperhalus diagram root locus 9. 4. 1 Titik-titik break-away dan break-in di sumbu riil Root locus berpencar (break-away) di sumbu riil sekitar -2 < < -1 dan berkumpul (break-in) di sumbu riil sekitar 3 < < 5. K mencapai suatu harga maksimum di titik break-away (untuk poles di sumbu riil, penguatan yang lebih besar akan menghasilkan poles kompleks) dan minimum di titik break-in. Penguatan bertambah ketika poles lup tertutup bergerak menjauhi poles lup terbuka dan menuju zeros lup terbuka. Di titik break-in, penguatan lebih besar ketika poles menjauhi titik break-in menuju zeros lup terbuka karena itu penguatan minimum di titik break-in. Pikirkan sebuah sistem dengan fungsi alih Menggunakan MATLAB untuk membangkitkan root locus fungsi alih di atas :

Hasil membuat diagram root locus dengan menggunakan MATLAB untuk

Aturan-aturan untuk membuat sketsa root locus Aturan 1 : terdapat dua cabang Aturan 3 : root locus terletak di sumbu riil antara -2 < s < -1 dan 3 < s < 5 Aturan 4 : jumlah zeros yang berhingga m =2, terdapat n – m = 0 zeros yang tak berhingga, root locus dimulai di poles s = -1 dan -2 dan berakhir di zeros s = +3 dan +5 Aturan 5 : terdapat n - m = 0 zeros di tak berhingga sehingga tidak ada asimtot Aturan 2 : simetri secara jelas terlihat dan dapat digunakan sebagai pengujian Contoh 9. 1 Titik-titik break-away dan break-in melalui diferensiasi. Tentukan titik-titik break- away dan break-in root locus contoh di atas dengan menggunakan kalkulus diferensial Solution: Di root locus Di sumbu riil, s = kita mendapat titik break-in atau break-away
")
Hasil yang diperoleh berupa titik break-away jika d 2 K=d 2 < 0 (maksimum) dan berupa titik break-in jika d 2 K = d 2 > 0 (minimum) Dengan menggunakan poles dan zeros lup terbuka, kita merepresentasikan sistem lup terbuka seperti yang terlihat di dalam diagram sebelumnya, sebagai Tetapi untuk semua titik sepanjang root locus, KG(s)H(s) = -1 dan sepanjang sumbu riil s = . Oleh karena itu Dengan memecahkan K, kita peroleh Dengan mendiferensialkan K terhadap s dan memberikan nilai turunannya sama dengan nol didapat Dengan memecahkan , kita dapatkan = -1, 45 dan = 3, 82 yang berturut merupakan titik-titik break-away dan break-in

Titik-titik break-away dan break-in dapat juga dihitung tanpa diferensiasi dengan menggunakan metode transisi: Titik-titik break-away dan break-in memenuhi relasi Di mana zi dan pi secara berturut-turut adalah nilai-nilai negatip zero dan pole yang dimiliki G(s)H(s) Dengan mengulangi problem yang sama dengan menggunakan metode transisi Solusi: Dengan penyederhanaan Oleh karena itu s = -1, 45 dan 3, 82 seperti sebelumnya 9. 4. 2 Perhitungan perlintasan sumbu-j Jika root locus melintasi sumbu imajiner ke sisi sebelah kanan bidang-s maka sistem menjadi tidak stabil untuk nilai K yang memberikan poles di sumbu imajiner. Oleh karena itu, cukup penting untuk mengevaluasi titik perlintasan j . Hal ini dapat dilakukan dengan mengunakan kriteria Routh-Hurwitz.
 pada saat melintasi sumbu imajiner. Berdasarkan contoh")
Contoh 9. 2 Frekuencysi dan penguatan (gain) pada saat melintasi sumbu imajiner. Berdasarkan contoh sebelumnya kita telah mendapatkan Tentukan nilai K dan frekuensi w yang bersesuaian di titik perlintasan sumbu imajiner. Solusi : Persamaan karakteristik lup tertutup adalah Tabel Routh untuk sistem ini diperlihatkan di bawah ini Baris s 1 adalah yang terpenting dilihat dari sudut pandang stabilitas. Baris ini menjadi nol ketika K = 9, 65. Nilai yang bersesuaian dapat ditentukan dengan menggunakan aturan Routh yang seluruh anggota dalam satu baris

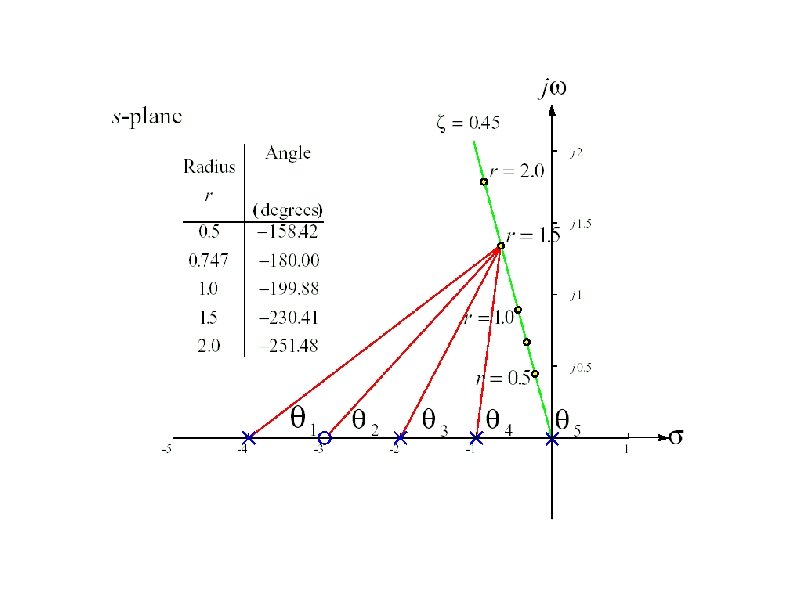
Dengan mensubstitusikan K = 9, 65 ke persamaan karakteristik lup tertutup memberikan Substitusikan s = j ke persamaan ini memberikan Dengan menyamakan bagian-bagian yang riil dan imajiner memberikan sehingga Oleh karena itu perlintasan di sumbu imajiner terjadi ketika w = 1, 59 rad/s. Perlu dicatat bahwa sebagai hasil analisi yang dibuat ini, kita dapat menyatakan bahwa sistem stabil untuk 0 < K < 9, 65 9. 4. 3 Sudut-sudut keberangkatan (departure) dan kedatangan (arrival) Jika sistem lup terbuka memiliki poles atau zeros yang kompleks, kemudian sketsa dapat lebih jauh diperhalus dengan penghitungan sudut-sudut keberangkatan dari poles dan kedatangan di zeros.
 dan pengkalibrasian root locus Program untuk pengkalibrasian root locus dengan")
9. 5 Penggambaran (plotting) dan pengkalibrasian root locus Program untuk pengkalibrasian root locus dengan menggunakan MATLAB diperlihatkan di bawah ini

9. 5. 1 Respon transien root locus

- Slides: 12