Passive Microwave Remote Sensing Passive Microwave Radiometry Microwave

 •")





 1978 -present • Scanning Multichannel Microwave")
 to detect photons")






")












 in")
 is smaller than the foreslope (a")





 and magnetic field (B) are orthogonal to each other Direction of each")















- Slides: 56
Passive Microwave Remote Sensing
Passive Microwave Radiometry • Microwave region: 1 -200 GHz (0. 15 -30 cm) • Uses the same principles as thermal remote sensing • Multi-frequency/multi-polarization sensing • Weak energy source so need large IFOV and wide bands
Microwave Brightness Temperature • Microwave radiometers can measure the emitted spectral radiance received (L ) • This is called the brightness temperature and is linearly related to the kinetic temperature of the surface • The Rayleigh-Jeans approximation provides a simple linear relationship between measured spectral radiance temperature and emissivity
At long wavelengths, such as in the microwave region, the relationship between spectral emittance and wavelength can be approximated by a straight line.
Rayleigh-Jeans Approximation a constant spectral radiance is a linear function of kinetic temperature • k is Planck’s constant, c is the speed of light, e is emissivity, T is kinetic temperature • This approximation only holds for >> max • (e. g. > 2. 57 mm @300 K)
Brightness Temperature e. T is also called the “brightness temperature” typically shown as TB
Brightness temperature can be related to kinetic temperature through emissivity Thus, passive microwave brightness temperatures can be used to monitor temperature as well as properties related to emissivity
Microwave Radiometers • Advanced Microwave Sounding Unit (AMSU) 1978 -present • Scanning Multichannel Microwave Radiometer (SMMR) 19811987 • Special Sensor Microwave/Imager (SSM/I) 1987 -present • Tropical Rainfall Measuring Mission (TRMM) 1997 -present • Advanced Microwave Scanning Radiometer (AMSR-E) 2002 present
Passive Microwave Radiometry • Passive microwave sensors use an antenna (“horn”) to detect photons at microwave frequencies which are then converted to voltages in a circuit • Scanning microwave radiometers – mechanical rotation of mirror focuses microwave energy onto horns
Passive Microwave Applications • • Soil moisture Snow water equivalent Sea/lake ice extent, concentration and type Sea surface temperature Atmospheric water vapor Surface wind speed Cloud liquid water only over Rainfall rate the oceans
Monitoring Temperatures with Passive Microwave • Sea surface temperature • Land surface temperature
Passive Microwave Sensing of Land Surface Emissivity Differences • Microwave emissivity is a function of the “dielectric constant” • Most earth materials have a dielectric constant in the range of 1 to 4 (air=1, veg=3, ice=3. 2) • Dielectric constant of liquid water is 80 • Thus, moisture content affects brightness temperature • Surface roughness also influences emissivity
Atmospheric Effects • At frequencies less than 50 GHz, there’s little effect of clouds and fog on brightness temperature (it “sees through” clouds) • Thus, PM can be used to monitor the land surface under cloudy conditions • In atmospheric absorption bands, PM is used to map water vapor, rain rates, clouds
Atmospheric Mapping • • Mapping global water vapor 85 GHz
Passive Microwave Sensing of Rain • Over the ocean: – Microwave emissivity of rain (liquid water) is about 0. 9 – Emissivity of the ocean is much lower (0. 5) – Changes in emissivity (as seen by the measured brightness temperature) provide and estimate of surface rain rate • Over the land surface: – Microwave scattering by frozen hydrometeors is used as a measure of rain rate – Physical or empirical models relate the scattering signature to surface rain rates
Rainfall from passive microwave sensors: Accumulated precipitation from the Tropical Rainfall Measuring Mission (TRMM) Similar to SSM/I
Passive Microwave Remote Sensing from Space Advantages Disadvantages • Penetration through nonprecipitating clouds • Radiance is linearly related to temperature (i. e. the retrieval is nearly linear) • Highly stable instrument calibration • Global coverage and wide swath • Larger field of views (10 -50 km) compared to VIS/IR sensors • Variable emissivity over land • Polar orbiting satellites provide discontinuous temporal coverage at low latitudes (need to create weekly composites)
Passive and Active Systems Passive remote sensing systems record electromagnetic energy that is reflected or emitted from the Earth’s surface and atmosphere Active sensors create their own electromagnetic energy that 1) is transmitted from the sensor toward the terrain, 2) interacts with the terrain producing a backscatter of energy, and 3) is recorded by the remote sensor’s receiver.
Active Microwave Remote Sensing
Radar=Radio Detection and Ranging Radar system components
Radar: How it Works • A directed beam of microwave pulses are transmitted from an antenna • The energy interacts with the terrain and is scattered • The backscattered microwave energy is measured by the antenna • Radar determines the direction and distance of the target from the instrument as well as the backscattering properties of the target
Radar Parameters • Azimuth Direction – direction of travel of aircraft or orbital track of satellite • Range angle – direction of radar illumination, usually perpendicular to azimuth direction • Depression angle – angle between horizontal plane and microwave pulse (near range depression angle > far range depression angle) • Incident angle – angle between microwave pulse and a line perpendicular to the local surface slope • Polarization – linearly polarized microwave energy emitted/received by the sensor (HH, VV, HV, VH)
Radar Nomenclature • Nadir • azimuth flight direction • look direction • range (near and far) • depression angle ( ) • incidence angle ( ) • altitude above-ground-level, H • polarization
RADAR logic
Radar Pulse Length
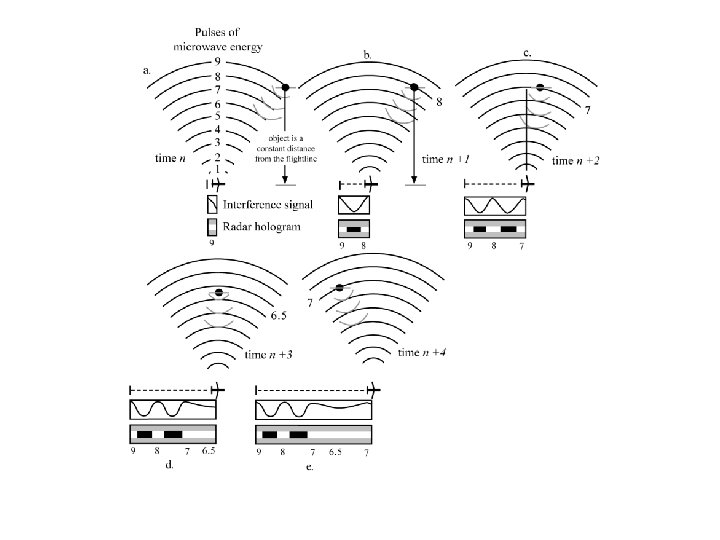
Synthetic Aperture Radar • Antenna “length” is increased synthetically by building up a history of backscattered signals from the landscape along the track of the sensor • Implemented by keeping track of the Doppler shift of the reflected signal (frequency of the transmitted signal is known)
Doppler Offset A target's position along the flight path determines the doppler frequency of its echoes: targets ahead of the aircraft produce a positive doppler offset targets behind the aircraft produce a negative offset As the aircraft flies a distance (the synthetic aperture), echoes are resolved into a number of doppler frequencies. The target's doppler frequency determines its azimuth position.
Creation of the RADAR Image
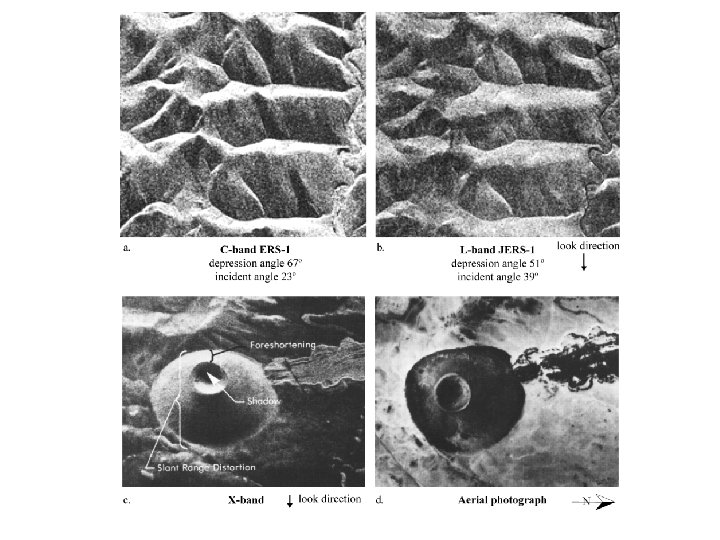
Image Foreshortening • Slopes that are facing the radar appear compressed (and bright) in the resulting image
Layover occurs when the incidence angle ( ) is smaller than the foreslope (a + ) i. e. , < a+. This distortion cannot be corrected!
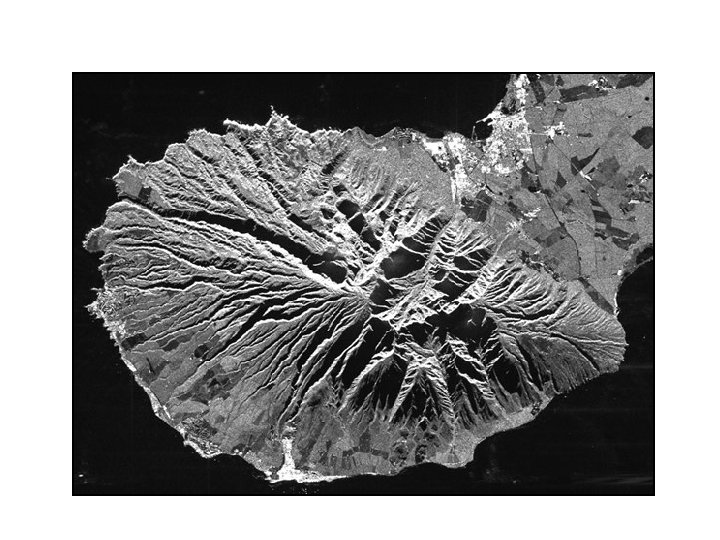
Radar Shadowing Radar shadowing can be useful for interpreting geomorphological features
Radar Backscatter Power received = Power per unit area at target x x Effective scattering area of the target Spreading loss of reradiated signal Effective receiving area of antenna x
Radar Backscatter Coefficient The efficiency the terrain to reflect the radar pulse is termed the “radar cross-section”, The radar cross-section per unit area, (A) is called the “radar backscatter coefficient” ( ˚) and is computed as : The radar backscatter coefficient determines the percentage of electro- magnetic energy reflected back to the radar from within a radar pixel This is similar to the reflectance in optical remote sensing
Radar Backscattering
Radar Backscattering Depends on the properties of the target: – roughness – dielectric constant Depends on characteristics of the radar: – depression angle – frequency/wavelength – polarization
Electrical (E) and magnetic field (B) are orthogonal to each other Direction of each field is perpendicular to the direction of wave propagation.
Polarization
Polarization • Plane polarized light can be either – vertically polarized (E 0 is perpendicular to the plane of incidence) – horizontally polarized (E 0 is parallel to the plane of incidence) • Solar radiation is unpolarized (random) but can become polarized by reflection, scattering, etc. • Lasers and radars produce polarized radiation
Radar Polarization • Cinder cone and basalt lava flow in north-central Arizona. • Strong return in the HH polarized image and weak HV polarization indicates that the lava is not depolarizing the radar pulse (it is composed of large blocks with smooth faces)
Rayleigh Criterion for Roughness • A surface is considered smooth at or below a height, h, if: [ cm ] h = the vertical relief (average height of surface irregularities) = the radar wavelength (measured in cm) g = the depression angle
Surface Roughness in RADAR Imagery
Nile River Sudan Space Shuttle Color. Infrared Photograph SIR-C Color Composite: • Red = C-band HV • Green = L-band HV • Blue = L-band HH C-band, = 6 cm L-band, = 24 cm
Radar and the Dielectric Constant • Dielectric constant depends on the type of material as well as its moisture state – it is analogous to the refractive index of the material – it is primarily a function of moisture content – also depends on chemical properties such as salinity • Dielectric constant is the ratio of the capacitance of a material to that of a vacuum. Also known as the “relative permittivity”
Dielectric Constant dielectric constant of liquid water is 80; dry soil is 2 -4.
Radar frequency and backscatter • Depth of radar penetration through the vegetation canopy varies directly with
Types of Active Microwave Surface and Volume Scattering that Take Place in a Hypothetical Pine Forest Stand
Response of A Pine Forest Stand to X-, C- and L-band Microwave Energy
SIR-C/X-SAR Images of a Portion of Rondonia, Brazil, Obtained on April 10, 1994
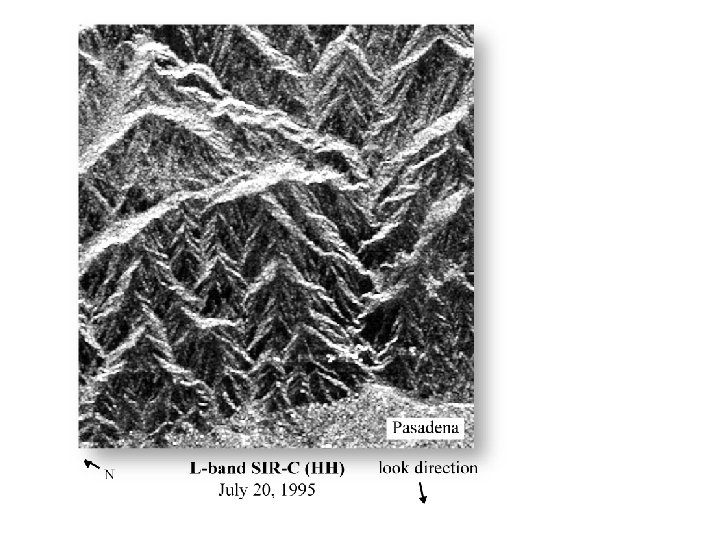
Cardinal Effect: High radar backscatter occurs when planar features or slopes are oriented perpendicular to the radar beam SIR-C/X-SAR radar image collected over the greater Los Angeles area on October 3, 1994.
Cloud Penetration • C-, L-, and P- band radars are defined as “all weather” • X-band radar does not penetrate heavy precipitation • Only Ka band (0. 8 - 1. 1 cm) has some cloud mapping capability
Commonly Used Radar Frequencies