OUTLINE l Backing up a truck Fuzzy truck

OUTLINE l Backing up a truck ☺ Fuzzy truck backer-upper system ☺ Neural truck backer-upper system ☺ Comparison of fuzzy and neural systems ☺ Sensitivity analysis ☺ Adaptive fuzzy truck backer-upper l Fuzzy truck-and-trailer controller ☺ BP truck-and-trailer control systems ☺ AFAM truck-and-trailer control systems l Conclusion l Reference

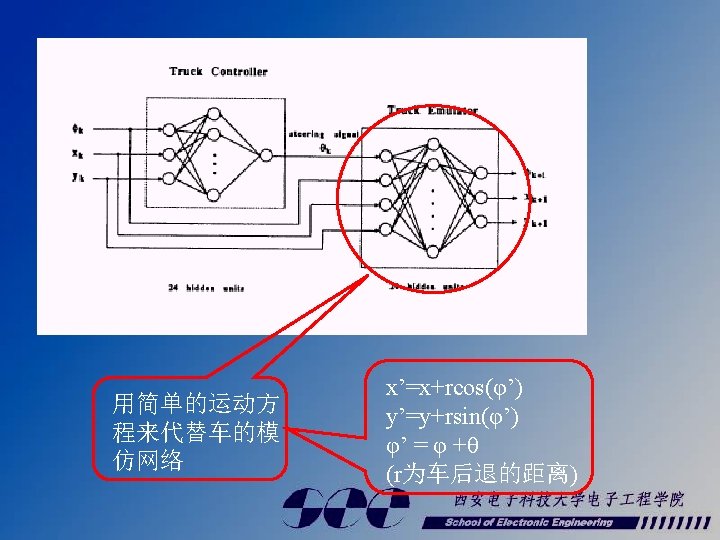
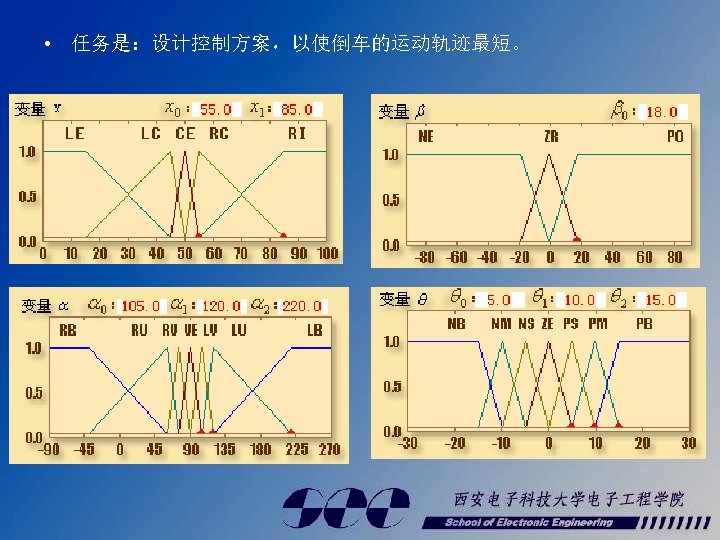
Fuzzy truck backer-upper system State variables : φ, x, y Determine the truck position Steering angle θ Discretized all values to reduce computation 0 ≤x ≤ 100 -90 ≤ φ ≤ 270 -30 ≤ θ ≤ 30 0. 1 One degree each

The fuzzy-set values of the input and output fuzzy variables

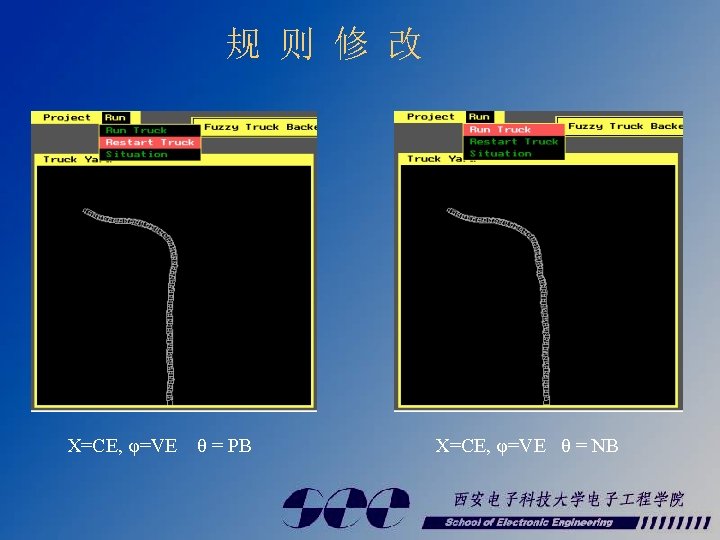
FAM rules and control surface LE RB 1 PS 2 LC CE RC RI PM PM PB PB RU NS PS PM PB PB RV NM NS PS PM PB VE NM NM 18 ZE PM PM LV NB NM NS PS PM LU NB NB NM NS PS LB NB NB NM NM NS Control surface of the fuzzy controller (rule 2)
 Rule 13 and 18")
• (Correlation-minimum FAM Inference Procedure) Rule 13 and 18

ØEach FAM rule emitted a fit-weighted output fuzzy set at each iteration ØThe total output O added these weighted outputs denotes the anteacedent fit value and represents the sequent fuzzy set of steering-angule valus in tne ith FAM rule 以前的fuzzy system用pairwise maximum 来合并输出 序列Oi. 但这会使得当FAM规则数增多时,产生一个 固定的输出序列O。
模糊 ØMaximum fit value ØCentroid defuzzification")
对于输出序列需要解(去)模糊 ØMaximum fit value ØCentroid defuzzification

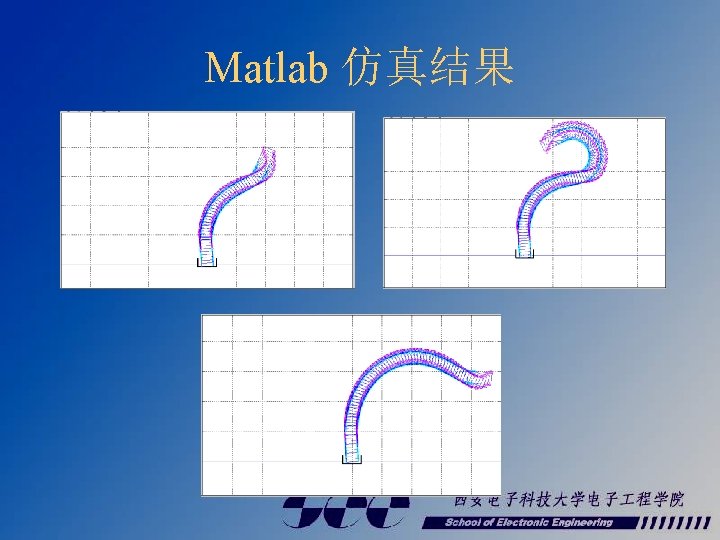
Kosto 系 统 仿 真 结 果 x=20 y=20 Φ=30 Iteration=33 Speed=3 x=30 y=10 Φ=220 Iteration=52 Speed=2 x=30 y=40 Φ=-10 Iteration=68 Speed=1

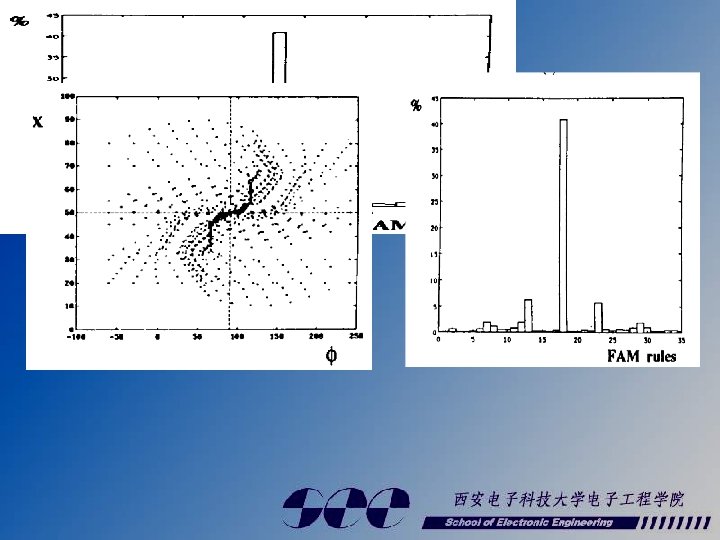
Rules


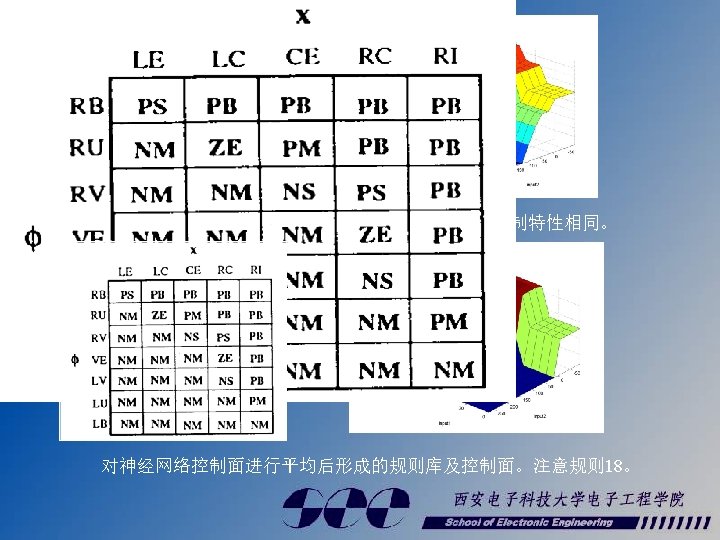
The neutral control surface shows less structure than the corresponding fuzzy control surface. Control surface of the netrul controller(y=20) This reflects the un structured nature of blackbox supervised learning.




两控制面和原模糊控制面的绝对差 DCL-FAM and Original BP-AFAM and Original The DCL-AFAM system produced less absolute error than the BP-AFAM system produced
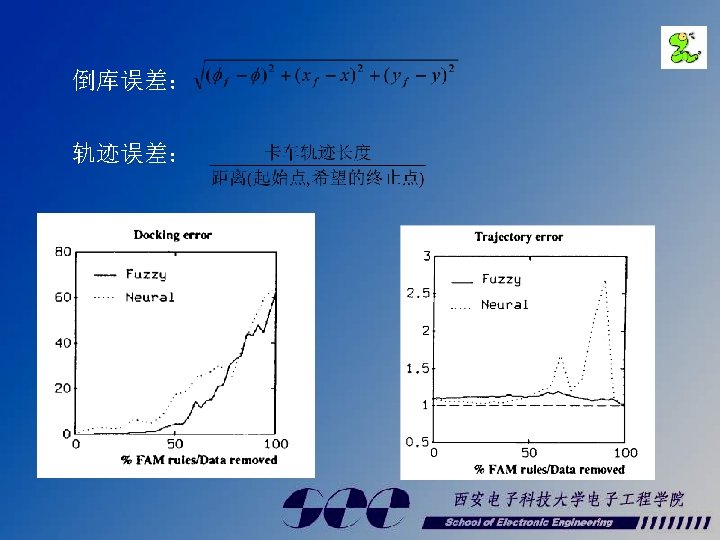
 BP_AFAM(dashed) Mean=1. 4449 S. d. =2. 2594 Mean=6. 6863 S. d.")
Docking error DCL_AFAM(solid) BP_AFAM(dashed) Mean=1. 4449 S. d. =2. 2594 Mean=6. 6863 S. d. =1. 0665 Trajectory error DCL_AFAM(solid) BP_AFAM(dashed) Mean=1. 1075 S. d. =0. 0839 Mean=1. 1453 S. d. =0. 1016 两种控制面 100次任意起始位置实验结果比较。

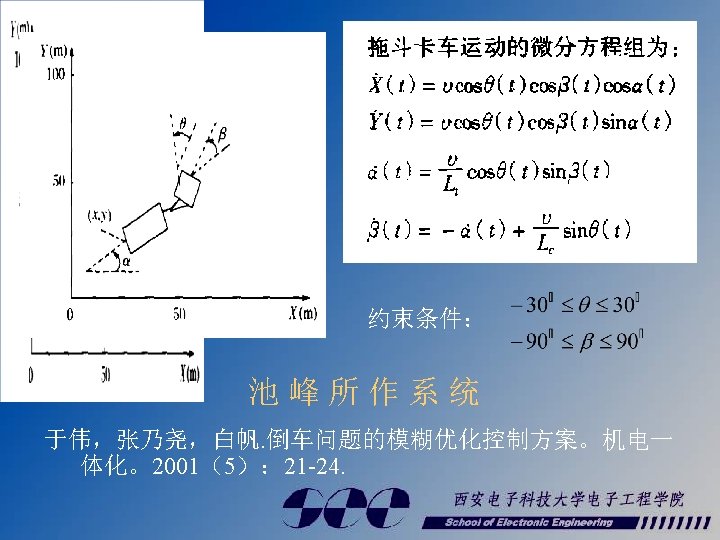
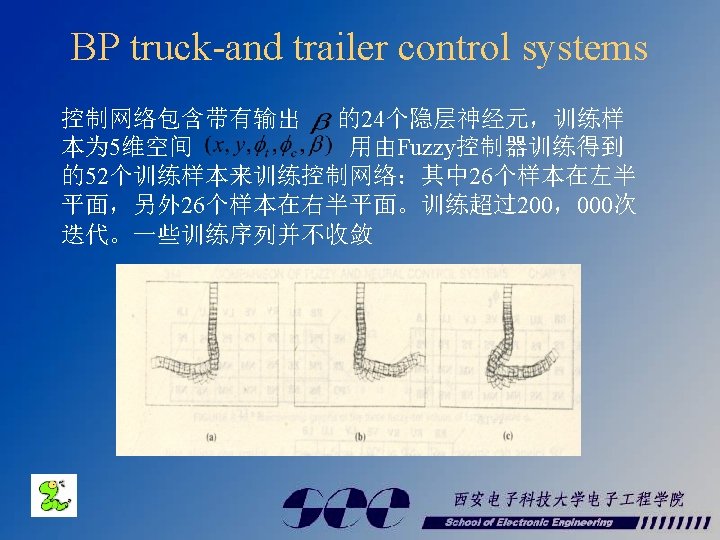
Fuzzy truck-and trailer controller
 The fuzzy systems successfully controlled the truck-and-trailer in jackknife")
折叠刀位置 (25, 30, -20, 30) The fuzzy systems successfully controlled the truck-and-trailer in jackknife position (80, 30, 210, -40) (70, 30, 200, 30)
 (60,30,210,-60) The original FAM and DCL-estimated AFAM systems exhibited")
AFAM truck-and-trailer control systems (30,30,10,45) (60,30,210,-60) The original FAM and DCL-estimated AFAM systems exhibited comparable truck-and-trailer control performance except in a few cases, where the DCL-estimated AFAM trajectories were irregular.

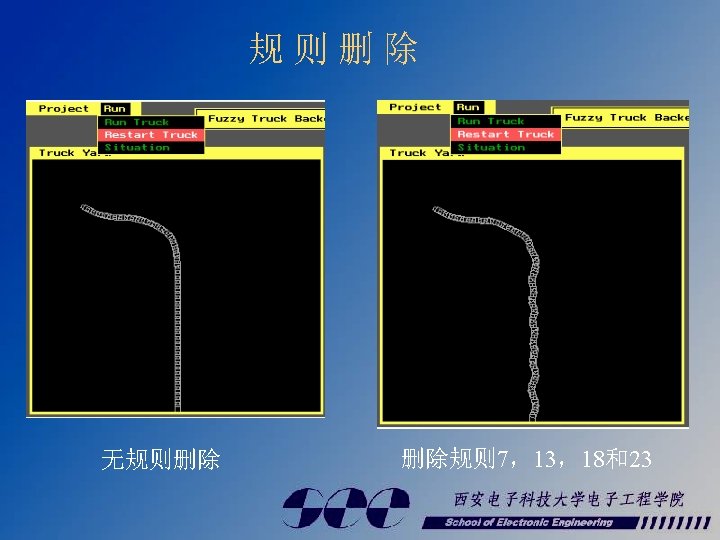
Conclusion • We can use only common sense and error-nulling intuitions to generate sufficient banks of FAM rules • These systems performed well until we removed over 50 percent of the FAM rules. This robustness suggests that, fuzzy engineers can solve many estimation and control problems • The speed with which the DCL clustering technique recovers the underlying FAM bank further suggests that we can likewise construct fuzzy systems for more complex, higher-dimensional problems • Wherever we model a system with neutral network, for little computational cost we can generate a set of structured FAM rules that approximate the neutral system’s behavior
- Slides: 38