n FIXED axis Rotation of a RIGID body

n FIXED axis Rotation of a RIGID body about an Every point of body moves in a circle Not fluids, . Every point is constrained and fixed relative to all others The axis is not translating. We are not yet considering rolling motion
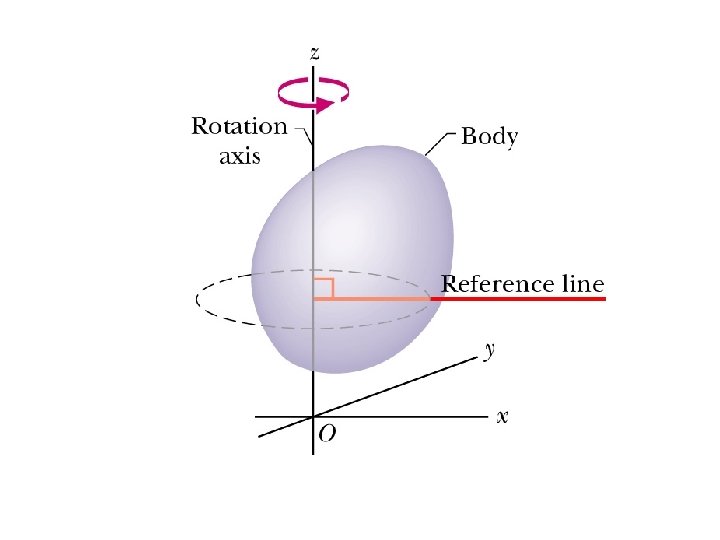

Y reference line fixed in body 2 1 X The orientation of the rigid body is defined by Rotation axis (Z) . (For linear motion position is r defined by displacement. )
 There are 2 radian in a circle 2")
The unit of is radian (rad) There are 2 radian in a circle 2 radian = 3600 1 radian = 57. 30

Example 1 The accuracy of the guidance system of the Hubble Space Telescope is such that if the telescope were sitting in New York, the guidance system could aim at a dime placed on top of the Washington Monument, at a distance of 320 km. The width of a dime is 1. 8 cm. What angle does the dime subtend when seen from New York? = 3. 2 x 10 -6 degree

Angular Velocity Y t 2 e m ti t A 2 1 X Rotation axis (Z) is a vector e t 1 At tim

Frequency, , is the number of revolutions per second Period, T , is the time per revolution

= 2. 50 rev The rotational frequency of machinery is often expressed in revolutions per minute, or rpm. A typical ceiling fan on medium rotates 150 rpm. What is the frequency of revolution? What is the angular velocity? What is the period of motion? = 15. 7 radians/s = 0. 400 s

Angular velocity is a vector is the rotational analogue of v is rate of change of units of …rad s-1

tangential

Angular Acceleration 2 D 1 is a vector direction of change in . Units of -- rad s-2 is the analogue of a

= -1 – 0. 6 t +. 25 t 2 e. g at t = 0 = -1 rad = d /dt = -. 6 +. 5 t e. g. at t=0 = -0. 6 rad s-1

Rotation at constant acceleration

An example where is constant =3. 49 rad s-2 = 8. 7 s w 0= 33¹/³ RPM = -0. 4 rad s-2 How long to come to rest? How many revolutions does it take? = 45. 5 rad = 45. 5/2 7. 24 rev.

Relating Linear and Angular variables Need to relate the linear motion of a point in the rotating body with the angular variables r s s = r and s

Relating Linear and Angular variables and v s = r s r Not quite true. V, r, and are all vectors. Although magnitude of v = r. The true relation is v = x r v

v= x r r v

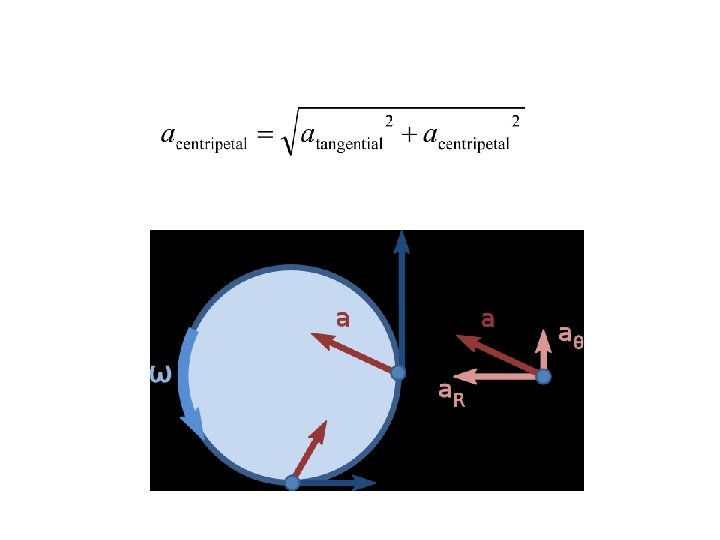
Relating Linear and Angular variables a and r Since = v/r this term = v 2/r (or 2 r) The centripetal acceleration of circular motion. Direction to center This term is the tangential acceleration atan. (or the rate of increase of v)

Relating Linear and Angular variables a and Thus the magnitude of “a” Total linear acceleration a a = r - v 2/r r Central acceleration Tangential acceleration (how fast V is changing)

Rotational Kinetic Energy An object rotating about z axis with an angular speed, ω, has rotational kinetic energy Each particle has a kinetic energy of n K i = ½ m i vi 2 Since the tangential velocity depends on the distance, r, from the axis of rotation, we can substitute vi = wri

The total rotational kinetic energy of the rigid object is the sum of the energies of all its particles Where I is called the moment of inertia

There is an analogy between the kinetic energies associated with linear motion (K = ½ mv 2) and the kinetic energy associated with rotational motion (KR= ½ Iw 2) Rotational kinetic energy is not a new type of energy, the form is different because it is applied to a rotating object Units of rotational kinetic energy are Joules (J)

Moment of Inertia of Point Mass q For a single particle, the definition of moment of inertia is n n q SI m is the mass of the single particle r is the rotational radius units of moment of inertia are kg. m 2 q Moment of inertia and mass of an object are different quantities q It depends on both the quantity of matter and its distribution (through the r 2 term)

For a composite particle, the definition of moment of inertia is n n mi is the mass of the ith single particle ri is the rotational radius of ith particle SI units of moment of inertia are kg. m 2 Consider an unusual baton made up of four sphere fastened to the ends of very light rods Find I about an axis perpendicular to the page and passing through the point O where the rods cross

Moment of Inertia of Extended Objects Divided the extended objects into many small volume elements, each of mass mi q We can rewrite the expression for I in terms of m q q With the small volume segment assumption, q If r is constant, the integral can be evaluated with known geometry, otherwise its variation with position must be known

Moment of Inertia of a Uniform Rigid Rod q The shaded area has a mass n dm = l dx q Then the moment of inertia is

Parallel-Axis Theorem In the previous examples, the axis of rotation coincided with the axis of symmetry of the object q For an arbitrary axis, the parallelaxis theorem often simplifies calculations q The theorem states I = ICM + MD 2 q n n n I is about any axis parallel to the axis through the center of mass of the object ICM is about the axis through the center of mass D is the distance from the center of mass axis to the arbitrary axis

Moment of Inertia for some other common shapes
- Slides: 30