Motore passo Tipi di motori passopasso In base

Motore passo
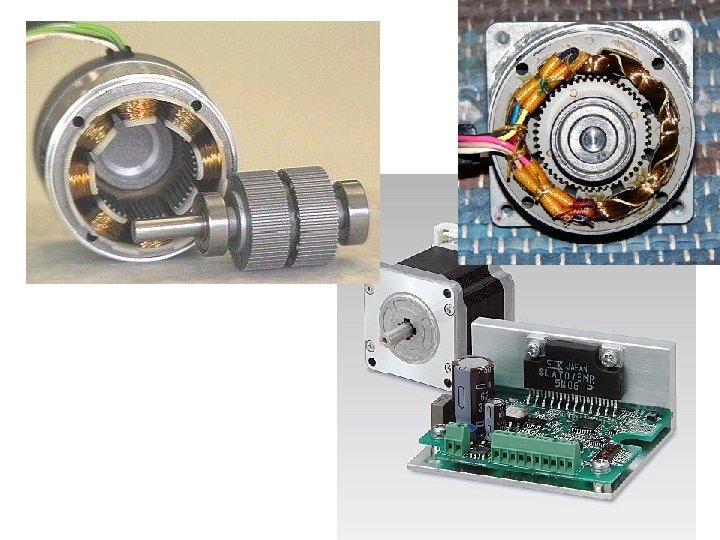

Tipi di motori passo-passo. • In base alla tipologia costruttiva i motori passo-passo sono: – a magnete permanente, – a riluttanza variabile e – ibridi.

A magneti permanenti
 il")
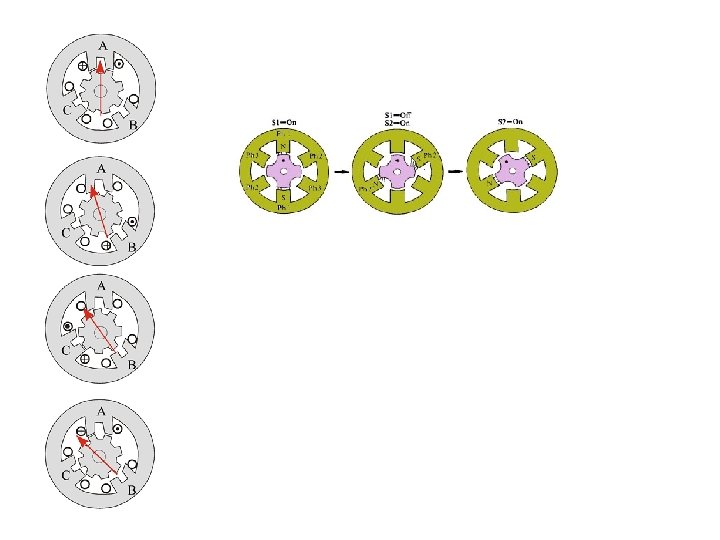
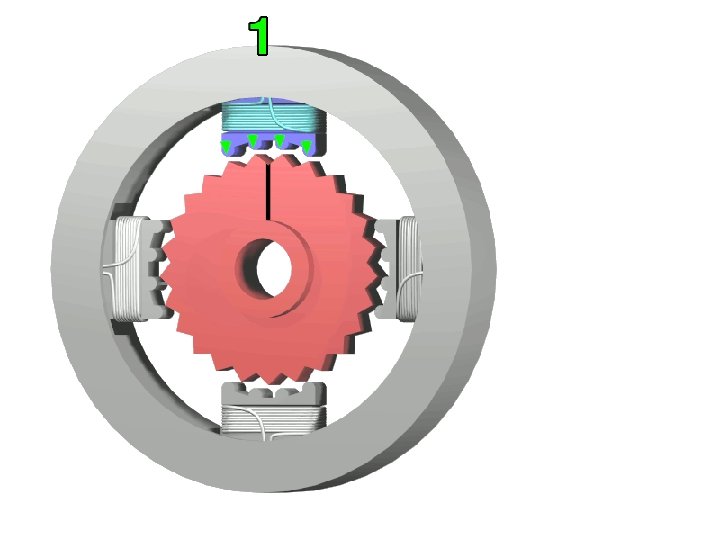
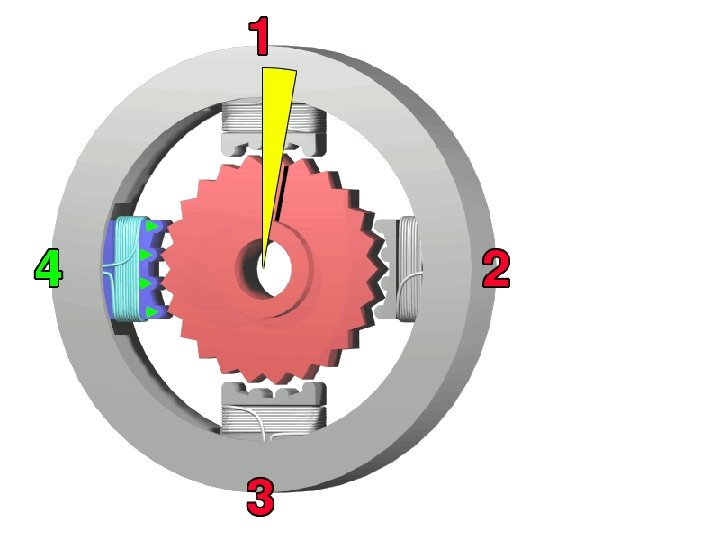
Wave mode • Nella modalità a una fase per volta (wave drive mode) il motore in una certo istante, ha una sola fase alimentata per volta. • Il passo 1 ha la sola fase AA’ del semistatore superiore alimentata la quale, nel verso di corrente da A verso A’, per il senso di avvolgimento realizzato, produce un campo magnetico con i poli come in figura: il rotore si allinea necessariamente con i poli di nome opposto.

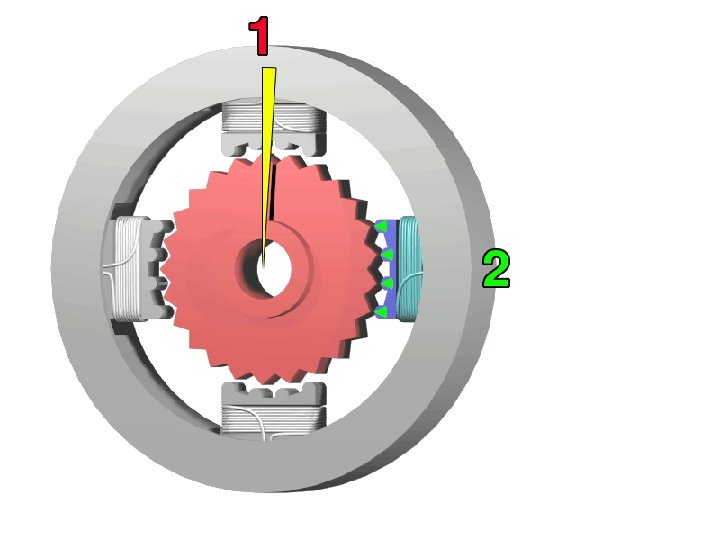
• Finché non si alimenta un’altra fase il rotore permarrà nella posizione raggiunta. Questa rotazione rappresenta il passo del motore o step. • Al passo 2 è alimentata la sola fase BB’del semistatore inferiore, la corrente è nel verso BB’, il campo magnetico di statore ruota di 45° in senso orario. Anche il rotore allinea il proprio campo in modo che si affaccino poli opposti.
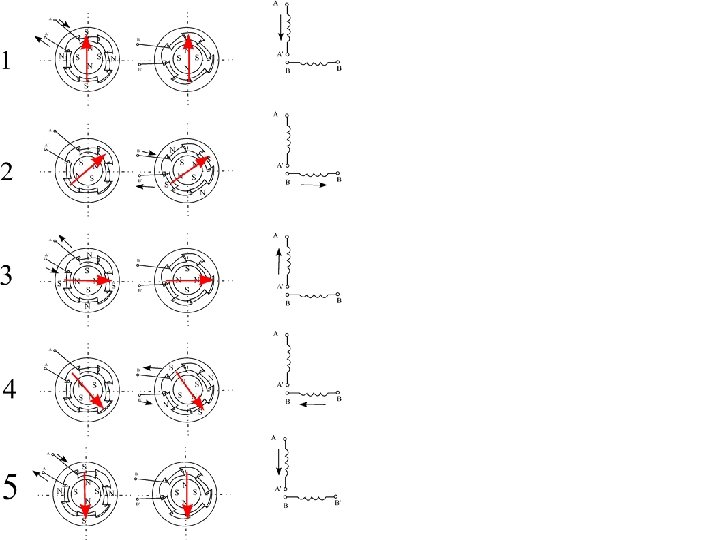
 • In questo modo il")
Azionamento a due fasi alla volta (normal drive mode) • In questo modo il rotore non si posizionerà più tra le due espansioni ma a metà tra l’espansione del semistatore superiore e l’espansione del semistatore inferiore. • Con questo azionamento si ha un notevole incremento della coppia, visto che il campo magnetico ora è generato da due bobine, ed un moto più regolare.
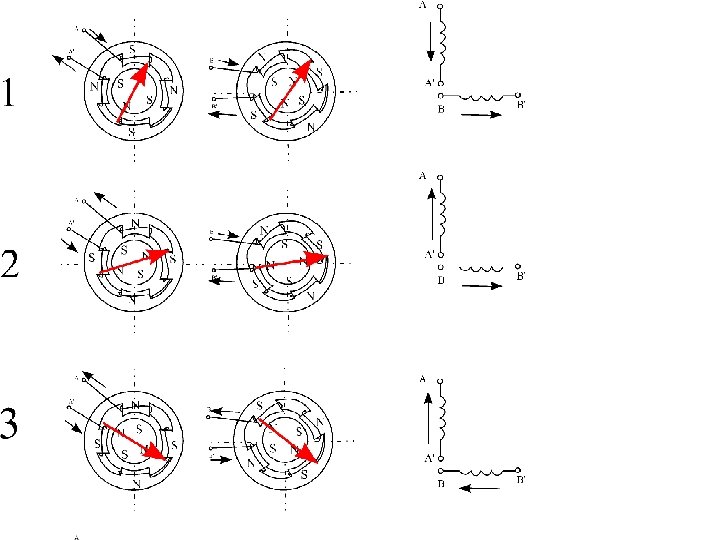
 il motore viene")
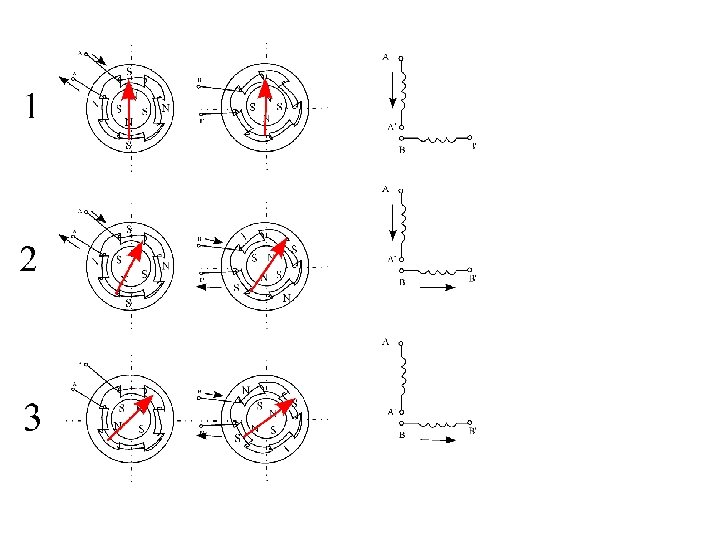
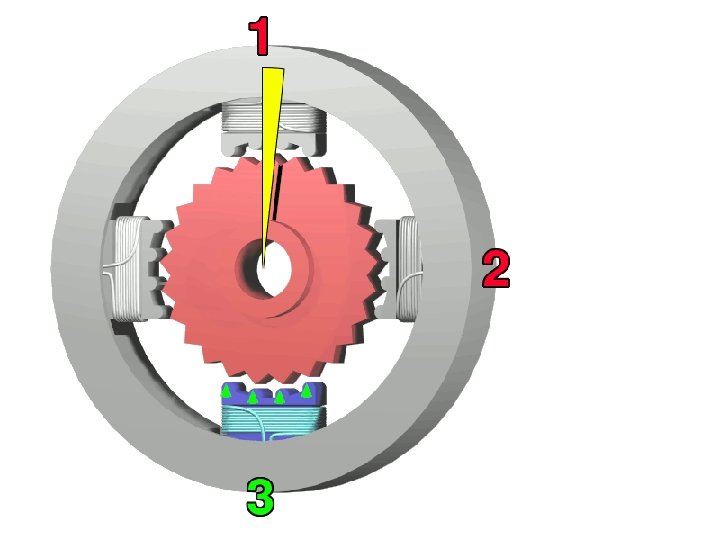
Azionamento a mezzo passo. • Nell’azionamento a mezzo passo (schema 3) il motore viene pilotato alternativamente a una e a due fasi alla volta dimezzando l’angolo di passo. • Per il primo passo, come per l’azionamento a fase singola, viene attivata la fase A. Il secondo passo si ha attivando la fase A e B. In questo modo si avrà uno spostamento di metà passo(22, 5°). • Successivamente verrà disattivata la fase A lasciando attiva B. Nella passo successivo, non rappresentato, si mantiene inalterata B, mentre A è alimentata in verso opposto al passo 1. Si procederà così per l’intero giro.

Half step • Come si può intuire però con questo azionamento si ha una coppia irregolare che va da un massimo dato dall’attivazione di due fasi a un minimo dato da una fase sola.

Il motore a riluttanza variabile • Il motore a riluttanza variabile consente di risolvere, almeno in parte alle limitazioni di velocità del motore passo a magnete permanente. I motori a riluttanza variabile hanno il rotore in ferro dolce che presenta un numero differente di espansioni polari o denti rispetto a quelle dello statore. Con questo accorgimento il rotore ruota in modo da rendere minima la resistenza (riluttanza) al campo magnetico generato dallo statore

Il motore a riluttanza variabile • Per diminuire l’angolo di passo è possibile costruire dei motori con un numero elevato di denti, in figura è visualizzato un motore a 4 fasi con 50 denti di rotore, in questo caso il numero di passi è 200 e l’angolo di passo è 1, 8°. In generale il numero di passi è: dove m è il numero di fasi e Nr è il numero di denti.

Il motore passo ibrido • Prendendo i pregi dei due tipi di motore appena visti si è realizzato il motore ibrido. Come dice il nome, questo motore è una via di mezzo tra i due tipi: ha il rotore costituito da un magnete permanente sul quale sono posizionate delle espansioni polari in ferro dolce.

Motori unipolari e bipolari

Unipolare: una fase

Unipolare half step

Motori bipolari

Bipolari una fase la volta

Bipolare half step

Caratteristica pull in pull out

Perdita sincronismo
- Slides: 29