Motor Learning Irfan Motor Relearning Programme Carr Shepherd1982

 The elimination of unnecessary muscle activity Feedback")




 SENSORY")
 PELVIS HIP k. NEE ANKLE MOVEMENT")
 =")


 FOG Fast-twitch Oxidative Glycolytic PINK SO")





















- Slides: 34
Motor Learning Irfan
Motor Relearning Programme - Carr & Shepherd(1982) The elimination of unnecessary muscle activity Feedback of information about performance Practice The MRP was made up of seven sections representing essential functions of everyday life: 1. Upper limb function 2. Orofacial function 3. Sitting up from supine 4. Standing up 5. Sitting down 6. Standing 7. Walking
Bobath / NDT- Berta & Karel Bobath A concept of treatment based on the inhibition of abnormal reflex activity and the relearning of normal movement, through the facilitation and handling. New version is a problem-solving approach to the assessment and treatment of individuals with disturbances of tone, movement, and function due to a lesion of CNS. The goal of treatment is to optimize function by improving postural control and selective movement through facilitation (IBITAH, 1995)
BOBATH CONCEPT is a problem-solving approach to the assessment and treatment of individuals with disturbances of tone, movement, and function due to a lesion of CNS. The goal of treatment is to optimize function by improving postural control and selective movement through facilitation. (IBITA, 1995)
GOALS OF CONCEPT To identify and address the specific areas of low tone in the anti-gravity musculature. To seek to control the amount and diversity of proprioceptive input. To identify the primary goals for function in the individual person, and to understand the nature of how that function is performed efficiently “Normally”
GOALS OF CONCEPT To facilitate specific motor activity without overflow of irradiation that could elicit associated reactions. To minimize compensation and therefore sensory/motor neglect of the affected body parts. To identify when and how voluntary controls can be used effectively.
CONSIDERATION POSTURAL CONTROL POSTURAL ORIENTATION INTERNAL REPRESENTATION BODY CONCEPT(Awareness, Schema , Image ) SENSORY CHANNEL MUSCULOSKELETAL COMPONENT NEUROMUSCULAR COMPONENT
HEAD CONTROL SHOULDER SCAPULAR ELBOW HAND PROXIMAL (ALIGNMENT) PELVIS HIP k. NEE ANKLE MOVEMENT
STATOKINETIC REACTION STABILITY/ MOBILITY = WORKS TOGETHER WHILE DOING SOMETHING. ( PURPOSEFUL MOVEMENT) = WE CALL IT POSTURAL CONTROL. = BASIS OF MOVEMENT
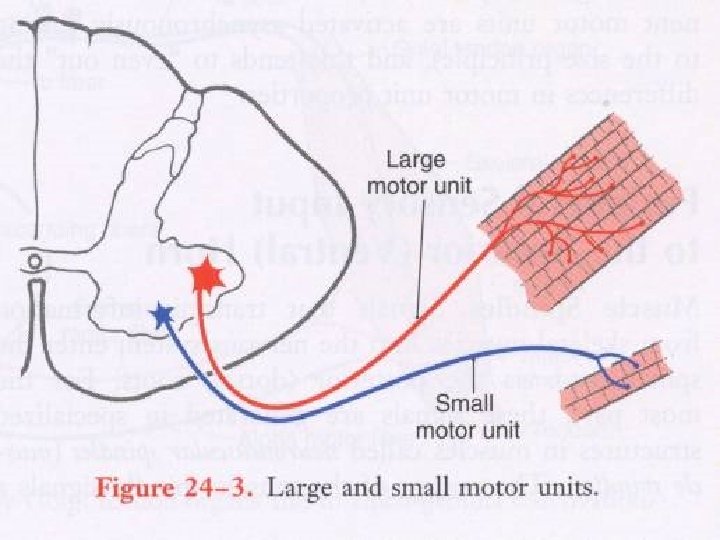
TONE PRODUCED THROUGH THE ACTIVATION OF MOTOR UNITS MOTOR UNIT THE MOTOR NEURON ALL THE MUSCLE FIBERS IT INNERVATES
MOTOR UNIT Relationship between fiber type, motor unit type and histochemical profiles of muscle fibers
FG WHITE Fast-twitch Glycolytic (involved in phasic movement) FOG Fast-twitch Oxidative Glycolytic PINK SO RED Slow-twitch Oxidative (involved in tonic movement) B. HWANG 1999
NUMBER OF MOTOR UNIT & INNERVATION RATIO Number of Motor Unit Innervation Ratio 2970 9 1 st Lumbricals 96 108 Brachioradialis 333 410 Tibialis Anterior Gastrocnemius 445 562 579 1934 Muscle Extensor Rectus
RECRUITMENT ORDER
POSTURAL TONE Gravity COG GRF BOS 12/19/2021 16
CENTRAL PATTERN GENERATOR POSURAL ALIGNMENT MOVEMENT ACIVATION FROM THE MUSCLES PROGRAMED MOVEMENT INFORMATION
Central Pattern Generators. Spinal circuits act as central pattern generators. The existence of pacemaker cells within neural tissue demonstrate the ability for circuits to be active without sensory input. The overall stepping pattern consists of a rhythmic alteration in the contractions of flexor and extensor muscles. The pattern of the pattern generator is written into the CNS map i. e. it is genetic.
ASSESSMENT MUSCLE Length Direction Strength Synergist ROM SKELETAL DIRECTION LENGTH SIZE MOBILITY
FETAL MOVEMENT Body concept - midline, Each direction Confidence- Security Neuromuscular junction - Motor output unit Musculoskeletal structual component
ROTATION
SELECTIVE MOVEMENT Hominid Primate Mammalian Amphibian Fish
ACTIVE MOVEMENT
Variable SPEED ROM COMPRESSION ROTATION DIRECTION Task-oriented Active ‘Carry-over or not, depend on your handling skill’
CONCLUSION PASSIVE STEREOTYPE
CONCLUSION ACTIVE COMMUNICATION
STABILITY & MOBILITY 12/19/2021 27
ALIGNMENT Form & Function Plasticity
SELECTIVE MOVEMENT -Fractionation-Against gravity 1. Vestibulo-spinal system 2. Reticulo-spinal system -Selectivity 1. rubro-spinal system 2. cortico-spinal system
BASE OF SUPPORT Accept & Adapt
INTERMUSCULAR RECIPROCAL INNERVATION eccentric concentric eccentric
The major problem facing the motor control system is not only to contract the agonist, or the prime mover by the correct amount and at the appropriate time, but to time and organize the pattern of antagonist, fixator and postural muscle contractions which are necessary to company it’s action (Rothwell, 1994)
Motor plans are implemented through networks that determine the order, timing and strength of movement around each joint, which is translated into a choreography of motor neuron activity that drives the individual muscles at the right amount and with the right force. (Harris-Warwick & Sparks, 1995)
Only active participation produces motor improvement or learning, which passive imposition of postures and movements can have no practical values. (Brooks, 1986)