Monitoring Processes at Sea using Underwater Sound Jeffrey





 = Passive Aquatic Listener (PAL) Designed to detect rainfall")

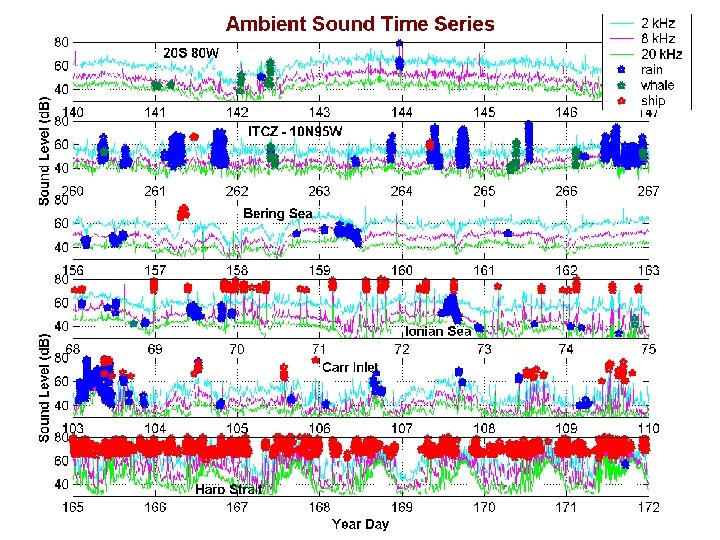
 Time series of spectra - adaptive sampling strategy -")

 spectral characteristic 2) temporal patterns")









")









")
 Rain : 9. 7% Wind: 82. 5 %")
 % raining = 5. 8 % drizzle =")
- Slides: 34
Monitoring Processes at Sea using Underwater Sound Jeffrey Nystuen Marie Curie International Fellow Hellenic Center for Marine Research and Principal Oceanographer Applied Physics Laboratory University of Washington Seattle, Washington, USA
• Ambient sound is present from physical, biological and man-made sources. – Wind – Precipitation – Sea Ice – Marine mammals (whales/seals) – Ships and sonars • Use it as a signal to detect and quantify the sources.
How do we interpret the ambient sound? Assume that different sound sources have unique features, spectral or temporal, that allow the source to be identified Classification is CRITICAL! Quantify (wind speed, rainfall rate, bubbles, whale identification, … Validate (anemometer, weather radar, sound clips, …)
Brief History 1940 s – Knudsen – underwater noise 1962 – Wenz curves – rain noise identified 1984 – acoustic wind measurements (Evans et al. ) 1990 – acoustic wind speed algorithm (Vagle et al. ) 1992 – lab studies of sound from raindrops (Medwin et al. ) (acoustic physics of drop splashes) 1999 -2002 – field measurements on TOGA-TAO array (PAL development) (Ma and Nystuen, 2005) 2001 – drop size distribution from sound (Nystuen) 2004 – Ionian Sea Rainfall Experiment (Nystuen et al. 2008) (spatial averaging) 2004 – ARGO float equipped with PAL (Riser et al. 2008) (Bay of Bengal monsoon signal) 2008 – POSEIDON weather observation system incorporates PALs 2010+ 45 ARGO floats with PALs to be deployed (Riser/Nystuen)
Overview
Instrumentation Acoustic Rain Gauge (ARG) = Passive Aquatic Listener (PAL) Designed to detect rainfall events Acoustic recorder: 1) high sample rate (100 k. Hz) 2) low duty cycle (1 %) 3) long deployment (low power) 4) adaptive sampling strategy Any recorder will work, but we really want: 1) rainfall rate 2) wind speed 3) whale detections … not sound levels
PAL being deployed
Two data collection modes 1) Time series of spectra - adaptive sampling strategy - variable time step depending on sound source 2) Selected original samples - used to identify sound source - 100 k. Hz sampling, 4. 5 seconds
A single sample Drizzle
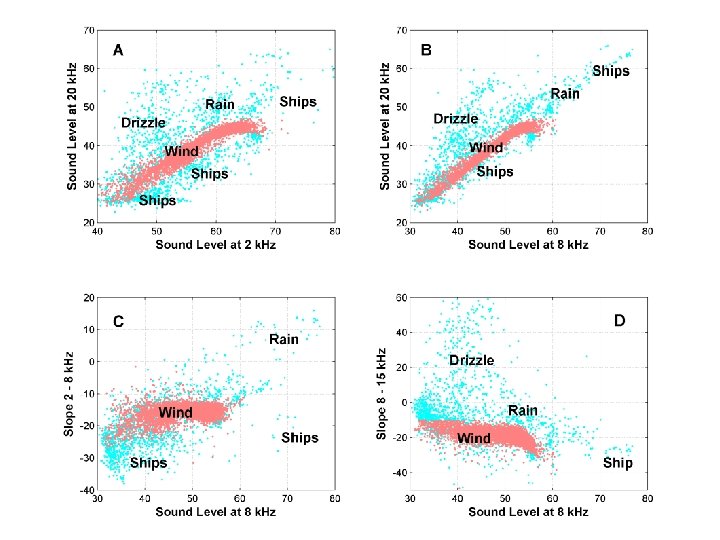
Classification depends on 1) spectral characteristic 2) temporal patterns
Wind Sound generated by resonating bubbles at leading edge of breaking waves No signal for U < 3/ms Distribution of bubble sizes controls the shape of the spectrum At very high wind speed small bubbles are stirred down and absorb new surface generated sound Uniform spectral slope from 2 -10 k. Hz at moderate wind speeds Sound levels highly correllated with wind speed
Rain Sound generated by resonant bubbles created during the splashes of individual raindrops Different distribution of bubbles sizes than for breaking waves 1 mm raindrops generate 15 -22 k. Hz bubbles (drizzle) 2 -3 mm raindrops generate larger bubbles (2 -10 k. Hz) (heavier rainfall) 4 -5 mm generate bubbles sound to 1 -2 k. Hz (convective rain) Spectral slope flatter than wind from 2 -10 k. Hz
Shipping Sound from engines, propellers, hull, etc. Generally more low frequency sound than wind or rain Close ships loud at all frequencies Distant ships (shipping) relative loud at lower frequencies Spectral slope from 2 -8 is steeper than wind or rain
Compare spectra
Verification of Classification Using sound clips to verify transient sounds
Marine mammal verification Aegean sea dolphin Pacific killer whale Bering Sea seal
Validation of Shipping Temporal record of ship passage Sound clips Close ship Naval sonar
Wind speed verification
Validation of rainfall detection
Validation of Rainfall Accumulation using POSEIDON data (rain gauges, weather radar, anemometers)
Acoustic products Sound Budgets What sound is loudest? When? At what frequency? Geophysical summaries Wind speed Precipitation Ice coverage Biological reports Cetacean detection Species diversity
Dominant Sound Sources Percentage of time present 20 S 85 W 10 N 95 W Bering Sea Ionian Sea Carr Inlet Haro Strait Wind 93% 86% 90% 74% 80 % 21 % Rain - 8 % 3 % 8 % 5 % Ships 0. 5 % 1 % 20 % 2 % 59 % Whale* 1. 8 % 0. 6 % - 0. 5 % - - Other 5 % 4 % 6 % 2 % 10 % 15 % *30 k. Hz click detected – no visual confirmation
Sound Summary at 2 k. Hz wind all Loudest 5% Loudest 1% rain boating other 76 % 10 % 3% 11 % 39 % 8% 47 % 6% 3 % 9% 87 % 1%
Sound Summary at 20 k. Hz wind all rain boating other 76 % 10 % 3% 11 % Loudest 5% 0 % 96 % 1% 3% Loudest 1% 0 % 94 % 3% 3%
Geophysical Interpretation Wind - Athos POSEIDON mooring Rain - Athos POSEIDON mooring
Aegean Sea Dolphin Detection at the Athos POSEIDON buoy
Ringed seal walrus Bearded seal Killer whale Humpback whale Bowhead whale
Conclusions Underwater sound can be used to monitor the marine environment - Sound levels - Sound sources - Geophysical interpretation - Biological monitoring Classification is critical
New Application: PALs on Argo Floats Argo Float – A 6872 – STS/PAL Deployed October 2010 Summaries for Profiles 009 and 010
Period 008 (JD 2010 days 311314)
Period 009 (JD 314 -317, 2010) Rain : 9. 7% Wind: 82. 5 % Ship: 3. 5 % Whales: 5. 1% Rain accumulation: 17. 4 mm
Period 010 (Days 317 -321, 2010) % raining = 5. 8 % drizzle = 2. 2 % whales = 4. 5 % wind = 87 Rain accumulation = 5. 6 mm Drizzle accumulation = 1. 4 mm