MODELO DIN MICO a Resultado Original Para cada
 Resultado Original: Para cada Ligamento “i” , temos:")
 Formulação Vetorial:")




 TRAJETÓRIA DESEJADA: q(t) =")
 A MATRIZ B(q) PODE SER DECOMPOSTA NUMA PARTE CONSTANTE E")
: (8)")














- Slides: 29
• MODELO DIN MICO: a) Resultado Original: Para cada Ligamento “i” , temos:
b) Formulação Vetorial:
OU SEJA,
PROPRIEDADES: SENDO ASSIM:
MODELO COMPLETO: é o coeficiente de atrito dinâmico é a magnitude do atrito estático F é a força aplicada no ambiente
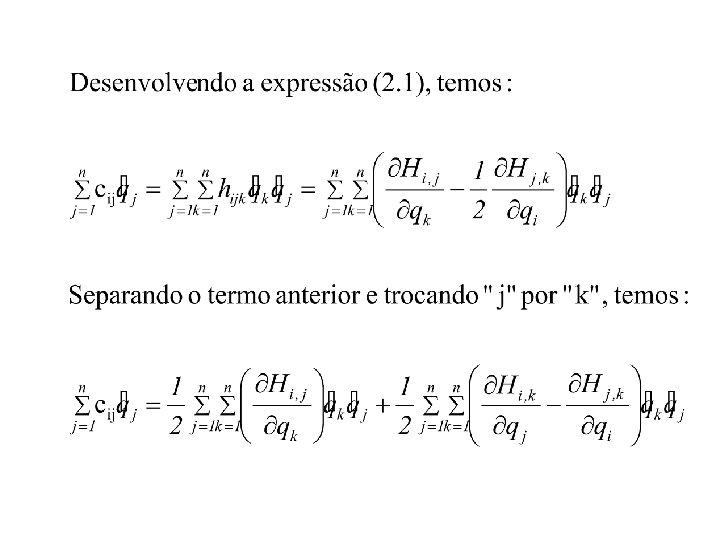
PELO BALANÇO DE ENERGIA, SABE-SE QUE A VARIAÇÃO TEMPORAL DA ENERGIA CINÉTICA É IGUAL À POTÊNCIA DOS ESFORÇOS ATUANTES SOBRE O MANIPULADOR. MOSTRE QUE ISSO IMPLICA EM QUALQUER QUE SEJA A CONSTRUÇÃO DA MATRIZ “C”.
• CONTROLE NO ESPAÇO DAS JUNTAS: MODELO CONSIDERADO: (3) TRAJETÓRIA DESEJADA: q(t) = qd(t) (4) TRANSMISSÃO: Krq(t) = qm(t) (5) Kr é a matriz nxn , considerada Diagonal
OS ATUADORES FORNECEM (6) A MATRIZ B(q) PODE SER DECOMPOSTA NUMA PARTE CONSTANTE E DIAGONAL, E OUTRA DEPENDENTE DA CONFIGURAÇÃO DO MANIPULADOR (FUNÇÃO DE SENOS E COSSENOS DOS NGULOS DAS JUNTAS): (7)
SUBSTITUINDO NA EXPRESSÃO DOS ESFORÇOS PRODUZIDOS PELOS ATUADORES E, USANDO A EXPRESSÃO (3): (8) Onde,
REPRESENTAÇÃO NO DIAGRAMA DE BLOCOS
MODELO NÃO LINEAR
CONTROLE COM REALIMENTAÇÃO DE POSIÇÃO
CONTROLE COM REALIMENTAÇÃO DE POSIÇÃO E VELOCIDADE
CONTROLE COM REALIMENTAÇÃO DE POSIÇÃO
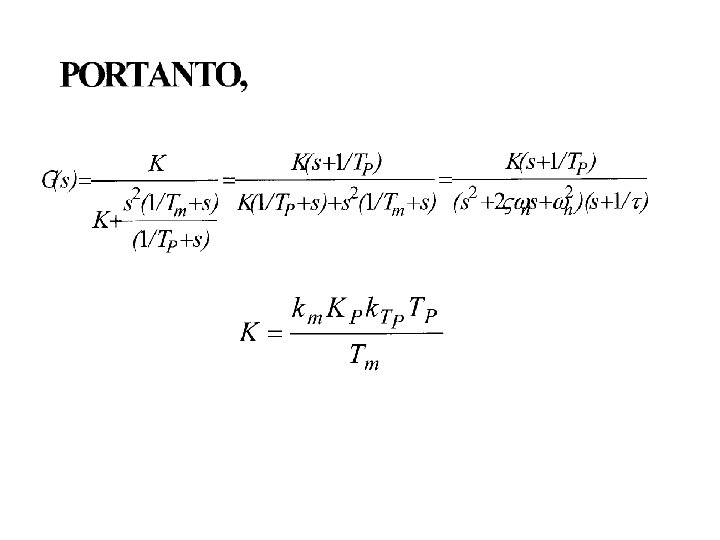
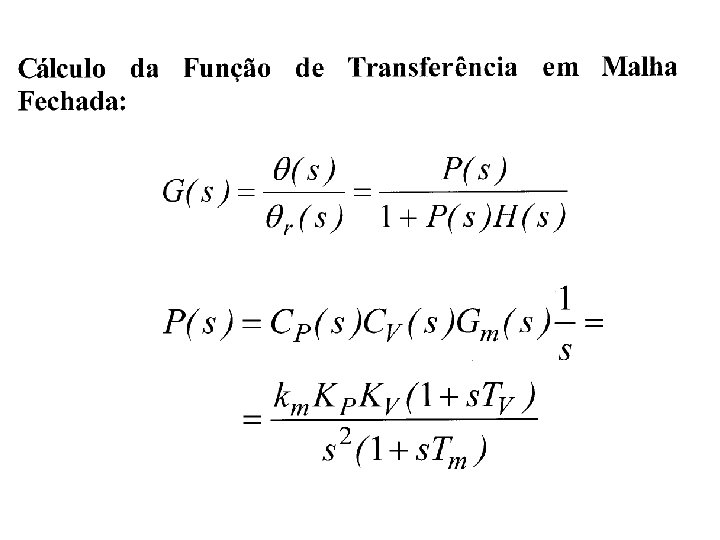
CÁLCULO DA FUNÇÃO DE TRANSFERÊNCIA EM MALHA FECHADA
FATOR DE REJEIÇÃO DE PERTURBAÇÃO
TEMPO DE RECUPERAÇÃO
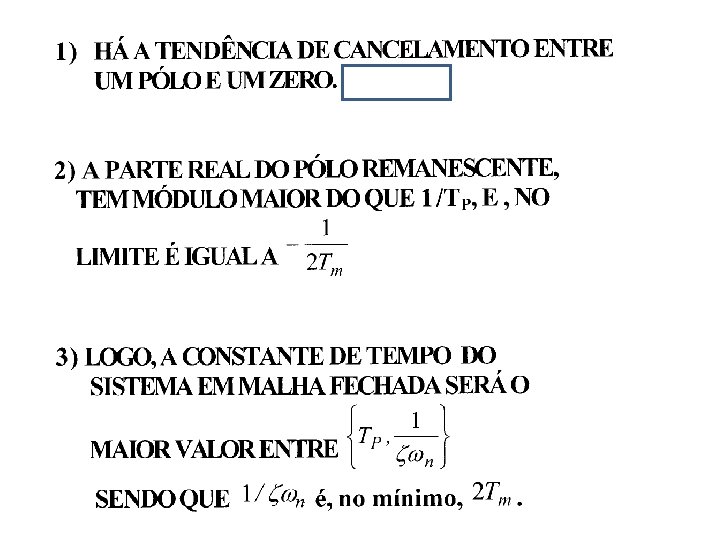
LUGAR DAS RAÍZES
CONTROLE COM REALIMENTAÇÃO DE POSIÇÃO E VELOCIDADE
CÁLCULO DA FUNÇÃO DE TRANSFERÊNCIA EM MALHA FECHADA
Igualando as 2 constantes de Tempo do Motor e Controlador
SENSIBILIDADE A PERTURBAÇÕES
LUGAR DAS RAÍZES