Model Predictive Impedance Control MPIC Motor Control Features

")




")
")
")



 Parameter(s) J B K T g")
 Parameter(s) 0% 15% 30% 45% J")


")

- Slides: 19
Model Predictive Impedance Control MPIC
Motor Control Features 1. 2. 3. 4. 5. 6. 7. 8. Feedback (closed loop) Feedforward (open loop) Learning Predictive Control Joint (muscle) impedance Interaction with environment Hierarchical EPH, Rhythmic & Tracking movements, …
Limbic System Highest Level Need Associative Cortex Plan Cerebellum Motor Cortex Basal Ganglia Middle Level Motor Program Spinal Cord Musculo-Skeletal System Movement Lowest Level
Trajectory Selector Brain Model . qd qd Identifier System. Disturbance Models M P C and Adaptation Algorithm . b + - b + Delay Feedforward Controller s b Delay + + Model Predictive Impedance Control G 1 Receptors EMG Receptors Torque + + Td G 2 G 3 q . q Joint-Load
Example 1: Rhythmic Movement
Rhythmic Movement Errors
Model Response for Rhythmic Movement Time (s)
External Disturbances Time (s)
Model Mismatch Responses for Rhtymic Movement Time (s)
Example 2: Tracking Movement
Tracking Movement Errors
Tracking Movement
Errors of Parameter Mismatch ( Rhythmic Movement ) Parameter(s) J B K T g J-B-K 0% 15% 30% 45% 1. 43 1. 61 1. 94 1. 48 2. 32 1. 61 1. 53 2. 30 2. 51 1. 59 2. 50 2. 28 3. 14 3. 27 3. 04 1. 73 2. 75 3. 02 6. 59 Error is root mean square errors (rad).
Errors of Parameter Mismatch ( Tracking Movement ) Parameter(s) 0% 15% 30% 45% J B K T g td J-B-K 0. 41 0. 42 0. 43 0. 42 0. 40 0. 45 0. 44 0. 45 0. 46 0. 43 0. 48 0. 50 0. 51 0. 46 0. 47 0. 48 0. 44 0. 86 0. 57 0. 70 Error is root mean square errors (rad).
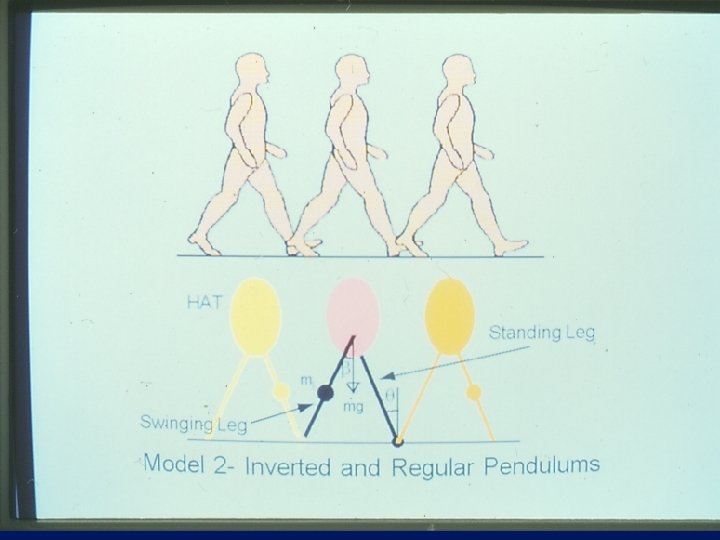
Example 3: Gait
Desired Trajectory Identification Control 1 2 MPC Step Function Dynamic Impedance PD Controller( b. S +s 1 _______ )T 1 S+1)(T 2 S+1( . Pendulum Dynamics Angle of Ankle Joint X =AX+BU Y =CX+DU x 0
Changes of Impulse Response & Control Signal in Double Pendulum Model Time (s)