Model Based Control Strategies Motor Learning Model Based
")
Model Based Control Strategies (Motor Learning)
")
Model Based Control • 1 - Inverse Model as a Forward Controller (Inverse Dynamics) • 2 - Forward Model in Feedback • 3 - Combination of above
 Reference G-1(s) G(s) Controller Plant Control Signal Output")
Inverse Model (Dynamic) Reference G-1(s) G(s) Controller Plant Control Signal Output
 Plant Model b Plant G(s) q")
Forward Model qd Controller Gc(s) Plant Model b Plant G(s) q
 Delay Output Reference Controller Delay Control Signal")
Reference Output Plant Controller Control Signal a) Delay Output Reference Controller Delay Control Signal b) Plant
 • 2 - Smith Predictor")
History • 1 - Feedback-Error-Learning (Kawato et al, 1987) • 2 - Smith Predictor (Mial et al, 1993) • 3 - Internal Model • 3 - Model Predictive Control (Towhidkhah, 1993, 1996)

Feedback Error Learning

Granule cell axons ascend to the molecular layer, bifurcate and form parallel fibers that run parallel to folia forming excitatory synapses on Purkinje cell dendrites. Cerebellar cortex also has several types of inhibitory interneurons: basket cells, Golgi cells, and stellate cells. Purkinje cell axon is only output of cerebellar cortex, is inhibitory and projects to the deep nuclei and vestibular nuclei. Deep nuclei axons are the most common outputs of the cerebellum.
")
Feedback Error Learning (cont. )
 G*(s) b Plant G(s) q")
Smith Predictor, 1958 qd Controller Gc(s) G*(s) b Plant G(s) q
 qd Controller Gc(s) Gm(s) - G*(s) b Plant G(s) q")
Smith Predictor (cont. ) qd Controller Gc(s) Gm(s) - G*(s) b Plant G(s) q
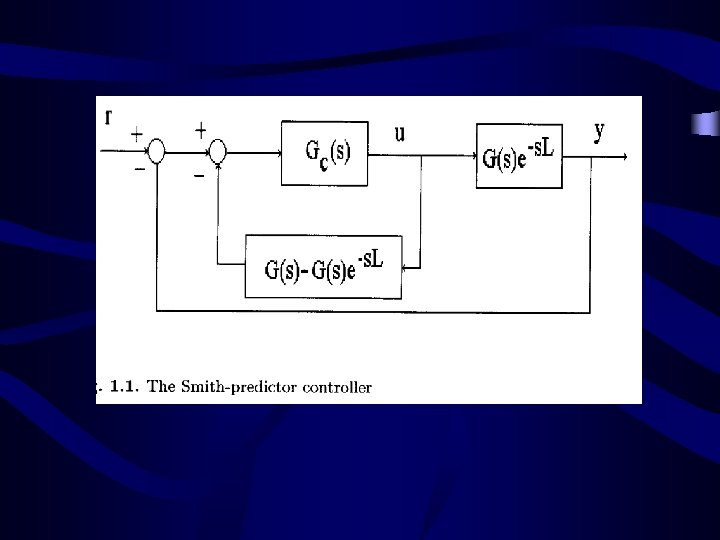

Miall, R. C. , Weir, D. J. , Wolpert, D. M. , and Stein, J. F. , (1993), "Is the Cerebellum a Smith Predictor ? ", Journal of Motor Behavior, 25, 203 -216.
")
Model Predictive Control (MPC)
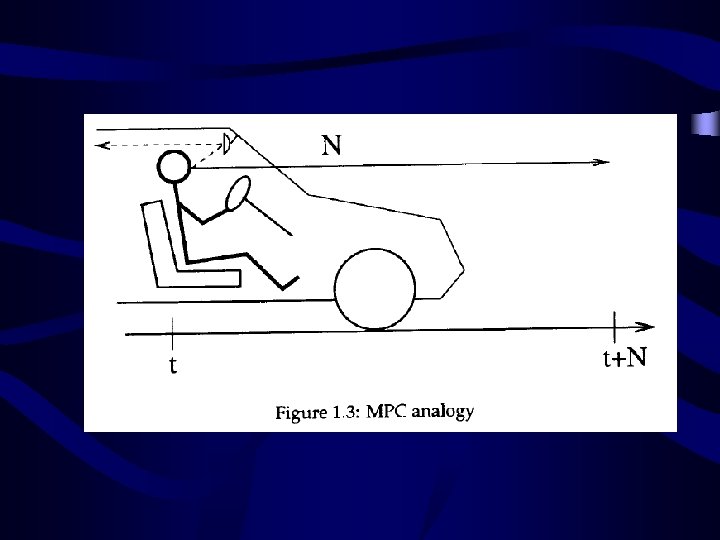
 1. Receding (Finite) Horizon Control 2. Using Time (Impulse/Step) Response")
Model Predictive Control (MPC) 1. Receding (Finite) Horizon Control 2. Using Time (Impulse/Step) Response 3. Based on Optimal Control with Constraints

Model Predictive Control qd Controller Optimizer qm Plant & Disturbance Model b Plant Td q

Model Predictive Control Basis

Smith Predictor & MPC Comparison

Comparison of MPC & Smith Predictor Case Plant Model Plant Delay Model Delay I 1/[s(s+wc)] 150 II 1/[s(s+wc)] 150 250 III 1/[s(s+wc)] 1/[s(s+wm)] 150 IV 1/[s(s+wc)] 1/[s(s+wm)] 150 250 150 V (s-0. 5)/[s(s+wc)] wc = 2*pi*(0. 9), wm = 2*pi*(0. 54), Gc=20, time delay is in ms.
")
Smith Predictor and MPC Outputs for Perfect Model Time (s)
 Smith Predictor and MPC Outputs for Time Delay Mismatch")
Time (s) Smith Predictor and MPC Outputs for Time Delay Mismatch
 Smith Predictor and MPC Outputs for Non-Minimum Phase System")
Time (s) Smith Predictor and MPC Outputs for Non-Minimum Phase System
 Error Case III Case IV")
Comparison of MPC & Smith Predictor ( Cont. ) Error Case III Case IV Case V SPC 0. 2664 0. 3096 0. 3271 0. 3830 0. 2485 MPC 0. 0519 0. 1363 0. 1428 0. 2525 0. 0303 SPC = Smith Predcitor Controller, MPC = Model Predictive Controller, Error is root mean square errors (rad).
- Slides: 26