Mindstorms Presentatie Lego Mindstorms 12 april 2001 Arjen






 • Videobeelden opnemen • Detecteren van licht •")

 • ingebouwde licht sensor")
 • ingebouwde licht sensor • 2 ingangen voor")
 • 3 ingangen voor sensoren • 3 uitgangen")

 • 7 ingangen voor analoge sensoren •")


 • Communicatie tussen computer en controller")

 • Tasks en subs • Gebruik")
; • Compileren • Uploaden naar")

 • Geen variabelen • Snel programma’s bouwen")

















 the True Story of………. . When Harry Met Sally!")

 Starting")

 Starting")


















































- Slides: 103
Mindstorms
Presentatie Lego Mindstorms 12 april 2001 • Arjen de Waard • Hugo Wesseling • Emile Hobo
Indeling Presentatie • Introductie • Lego Mindstorms Componenten • Programmeren van Lego Mindstorms • Toepassingsgebied • Lego Mindstorms Projecten uit de Praktijk
Introductie Lego Technic • Mechanieken • Aandrijving dmv motor / pneumatiek Lego Mindstorms • Programmeerbare bouwstenen • Autonome robots
Overzicht Componenten PC Sensoren Programmeerbare Controller Actuatoren
Lego Sensoren • Touch Sensor • Light Sensor • Rotation Sensor • Temperature Sensor
Lego Sensoren Lego Cam (Vision Command) • Videobeelden opnemen • Detecteren van licht • Detecteren van kleur • Detecteren van bewegingen • Beeldherkenning
Lego Actuatoren • Gear Motor • Lamp • Fiber Optics Strands
Lego Controllers Micro Scout (Dark Side Developerkit / Droid Developerkit) • ingebouwde licht sensor • ingebouwde motor • 7 programma's
Lego Controllers Scout (Robotics Discovery Set) • ingebouwde licht sensor • 2 ingangen voor sensoren • 2 uitgangen voor actuatoren • infrarood communicatie
Lego Controllers RCX (Robotics Invention System) • 3 ingangen voor sensoren • 3 uitgangen voor actuatoren • infrarood communicatie
IR Communicatie IR Transmitter voor communicatie met PC Remote Control
Alternatieve Componenten Handy Board (Fred Martin, MIT) • 7 ingangen voor analoge sensoren • 9 ingangen voor digitale sensoren • 4 uitgangen voor DC motoren
Alternatieve Componenten • Ultrasonische Afstand Bepaling
Alternatieve Componenten Sensors van DCP Microdevelopments • Vochtigheid Sensor • Luchtdruk Sensor • Beweging Sensor • Geluid Sensor • ph Sensor • Spanning Sensor
Programmeren van controllers • Personal Computer nodig (Ruputer) • Communicatie tussen computer en controller • Taal nodig voor programmeren • Mogelijk door CPU in controllers • Talen nodig voor verschillende doelgroepen
Programmeertalen • Programmeren in verschillende talen: • Not Quite C • Grafisch programmeren • Forth for the RCX • leg. OS
Not Quite C • Lijkt op C (java) • Tasks en subs • Gebruik van variabelen • Sensoren lezen: X=SENSOR_1;
Not Quite C • Actuators aansturen: Setoutput( OUT_A+OUT_B, OUT_ON); • Compileren • Uploaden naar controller
Grafisch programmeren • Simpel Drag en drop • Bouwstenen: 1. Commands 2. Sensor watchers 3. Stack controllers 4. User commands
Grafisch programmeren • Event handling (parallel) • Geen variabelen • Snel programma’s bouwen
Toepassingen • Speelgoed • Educatief • Onderzoek
Mindstorms in de praktijk Constructie van robots: • Voortbeweging - Lopen - Rijden - Obstakelontwijking • Artificial life
Een lopende spin • Voortbewegen als insect • Eenvoudige constructie - Weinig motoren - Weinig sensoren - Makkelijk uitbreidbaar • Onderzoeksobject Fig. 1 Een eerste prototype
De voortbeweging • Niet elke poot afzonderlijk • Omcirkelde poten worden opgetild Fig. 2 De voortbeweging
Resultaat • Druksensoren - Lichtsensoren • Poten multiterrein • Afstandsbediening Fig. 3 Uiteindelijke robot
Rijdende robot • Gegroepeerde wielbesturening • Manouvreren in elke richting • Model voor toekomst - Kantoren - Precisie robots Fig. 4 Het rijmechanisme
De vectorrover • Rijdende robot • Neemt omgeving waar - Ziet - Tast • Moet intelligent de weg zoeken Fig. 5 De vectorrover
The jungle cube • Artificial life • Zwak en sterk • Dag en nacht • Emoties • Survival Fig. 6 De jungle
… en zijn bewoners • Zelfstandige agents • Eigen persoonlijkheid - Wil om te overleven - Vijandig / Vriendelijk - Kan geluid maken • Synchronisatie Fig. 7 VOER!
Mindstorms on the Net • Excellent facility to overcome any obstacles that may be encountered • Common questions answered • Program tuition • Additional products introduced
Touch and light sensors • Very easy to assemble • Very sensitive to external stimuli
Rotation and temperature sensors • Temperature sensor would be of particular use in conducting potentially dangerous science experiments via robotics
Robotic Command Explorer • RCX • program downloaded via infra red beam • 3 output terminalused for motors • 3 in/out terminals for touch, light, temperature sensors
My model • Lego construction enjoyable, however the integration of the motors seemed a little difficult in terms of design • The motors should snap together
It works
Using both sensors
RCX as “Find” Command Simulator Translating Abstract Computing Concepts into Physical Form
(or) the True Story of………. . When Harry Met Sally!
…. . Young, successful, blonde-haired, blue-eyed, charming I. T. professional seeks HOT STUFF Please contact HARRY at P. O. Box 1591……….
Scenario I: End of File (“Face it, Harry, she just aint out there!”) Starting Point: Execute “Find” Command RECORD 1 RECORD 2 RECORD 3 Incorrect Records Correct Record not found/ E. O. F. = Program ends after 30 Seconds RECORD 4
Scenario II: Timeout RCX “Find” Command Simulator Timeout Scenario (Only one step short of Heaven…. …) Starting Point: Execute “Find” Command RECORD 1 RECORD 2 “Find”Program (30 Seconds’ Duration) ends without record being found = Timeout! RECORD 3 Incorrect Record Correct Record RECORD 4
Scenario III: Successful Record Retrieval (and their eyes met across a crowded room) Starting Point: Execute “Find” Command “Find” ends when RECORD 1 correct Message record found sent to RECORD 2 second RCX RECORD 3 Incorrect Records Correct Record RECORD 4
How the “Find” Command Simulator Works • Running RCX Program as a Metaphor for Execution of “Find” Command (Search Engine query). • Physical Environment as Database Table. • Obstacles Within Environment as Records in Database Table. • Touch Sensors Locate Incorrect Records
How the “Find” Command Simulator Works 4. Light Sensor Locates Correct Record. 5. On Retrieval of Correct Record, “Find” Output Delivered on Screen via Infra-Red Message to Second RCX
How the “Find” Command Simulator Works 6. Motors Off to Signify End of Search. 7. Correct Record Not Found Within 30 Seconds = Search Timeout/ End of File.
Disadvantages/Limitations of Lego Mindstorms 1 Criticism: Aurally-impaired Users or Users without a Soundcard excluded from Software Tutorial. Recommendation: Voice-over should be accompanied by additional sub-titled Text. Criticism: No Obvious Means of Skipping Tutorial results in many Users going through Process each time Software is installed Recommendation: There should be better Signposting of “Skip Tutorial” Option.
Disadvantages/Limitations of Lego Mindstorms 2 Criticism: There is more Emphasis on Mechanical Skills than is Necessary for our Purpose, although this in itself is not a bad thing. Recommendation: For Non-Engineering Students, a Pre. Assembled Model might be of more Use. Criticism: If one uses the Software Guide without having IR transmitter connected to PC, one is forced to exit the Application. Recommendation: Independence of Software Guide & IR Transmitter/ RCX.
Disadvantages/Limitations of Lego Mindstorms • Criticism: Difficulty in identifying where Process is failing, e. g. , whether it is Software or Hardware-related • Recommendation: Debugger tool should be included in Package. • Criticism: Conflict between Interrupt Handlers means that eventoriented Program will not run. • Recommendation: Better Troubleshooting for Programming (as opposed to Construction). • Criticism: Built-in Obsolence. For Example: Rubber-Bands last an average of 5 Minutes, therefore, after one has run out of the supply included in the kit, it is no longer possible to test.
Advantages of Lego Mindtools 1 Easy Introduction to Computer Programming. Opportunity to show abstract Concepts in concrete Form. Opportunity for Multi-Faceted Learning, e. g. , Programming/ Mechanics/ Engineering/ etc.
Advantages of Lego Mindtools 2 Instructions are self-explanatory, logical and intuitive. Positive Feedback provided throughout Tutorial which is encouraging for the Beginner.
Program screenshot Example of one Program that didn’t work because of conflict between stacks
Academic Evaluation Hugobos • Excellent means of introducing basic programming concepts such as loops, nested loops and conditional statements, in an environment where effects on an end product can easily be viewed • Excellent teaching tool for In/ Out devices and interfacing • Robotics is put easily within the grasp of a teenager • The integration of both software and hardware gives a very balanced education • The complementary relationship between hardware and software can be seen at a glance, as opposed to the traditional approach of introducing both as separate disjointed topics in IT
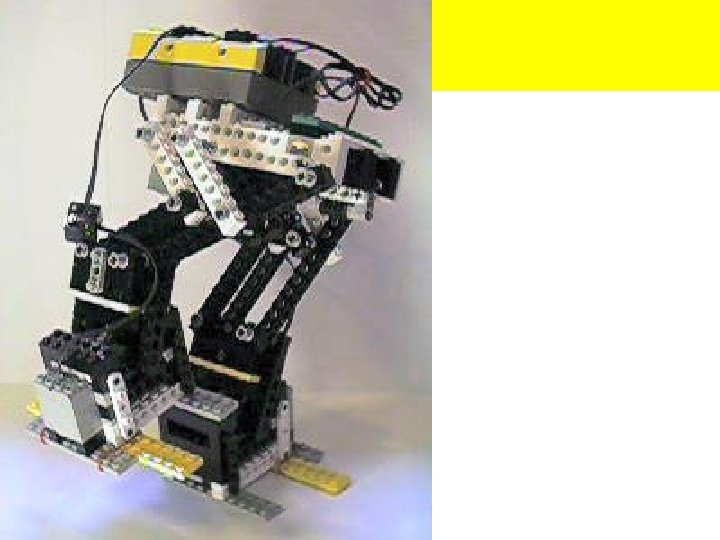
• Biped 1 • • • This is the biped robot "Biped 1". This robot has an ankle motor each leg, and can walk by switching own center of balance.