Mechanisms and Algorithms Lab Lego Cams Springs and

Mechanisms and Algorithms Lab: Lego Cams, Springs and Linkages
 Cam Follower application Torsional")
Lab Experiments 1. 2. 3. 4. Cam Follower (with spring) Cam Follower application Torsional Linkage (with spring) 4 -Bar Linkage

Exercise 1: The Cam Follower Isogawa’s Lego Crankshaft Video

Beam 5 32316 Beam 9 40490 Gear 20 Double Bevel 32269 2 x Bush 3713 Pin Long Stop Bush 32054 Axle 2 Notched 3 x Pin with Friction 32062 4459 2 x Axle 3 4519 Beam 3 x 5 Bent 90 32316 Rubber band Gear 36 Double Bevel 32498 Gear 24 Tooth 3648 Step 1: Parts. Step 3: Pin Gear 20 to Beam 5 and Bent 90 Step 2: Pin the Gear 36 and Bent 90 to Beam Step 4: Install Pin Long and loop with Rubber band

Exercise 2: Application of the Cam Follower Isogawa’s Lego Motorized Cam Follower Video

NXT Motor 53787 2 x 56 x 26 Balloon Tire 55976 10 x Pin with Friction 4459 2 x Wheel 30. 4 mm x 8 x Bush 20 mm with 3 Pinholes 3713 44292 2 x Gear 36 Tooth Double Bevel 32498 2 x Pin Long with Friction 6558 2 x Gear 20 Wedge Belt Tooth Double Wheel Bevel 4185 32269 Axle 8 3707 2 x Liftarm 3 x 5 Bent 90 32526 2 x Liftarm 2 x Rubber 2 x Beam 7 3 x Axle 5 1 x 3 Straight Bands 32524 32073 32523 Step 1: Parts. Step 3: Complete Tire Assembly. Attach Liftarms Step 2: Thread Long Pins and Pins. Prep Tire and Gear Step 4: Attach 36 T Gears off-center. Attach Rubber Bands

Step 5: Complete wedge wheel. Repeat 36 T Gear Assembly on opposite side Exercises 2 -1 Attach Motor to Port A with cable. Write and run a program to make mechanism move forward and the backward.

Exercise 3: The Torsional Linkage Isogawa’s Lego Torsional Linkage Video

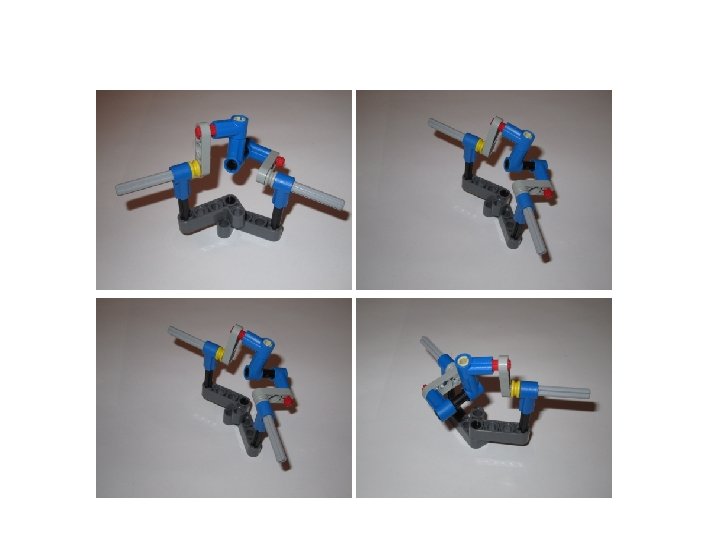
Liftarm 1 x 7 Bent 32348 Liftarm 1 x 5 32017 5 x Angle Connector #1 32013 Pin with Friction 4459 2 x Axle 5 32073 Bush 3713 Axle 3 4519 2 x Axle Pin 3749 Bush ½ Type 1 4265 A Rubber band Step 1: Parts. Step 3: Thread rubber band. Thread Axles Step 2: Pin Liftarms. Attach Angle Connectors #1 Step 4: Attach Connector #1 s onto Axles

Exercises 3 -1 Construct the following multi-joint linkage

Exercise 4: The 4 -Bar Linkage Isogawa’s Lego 4 -Bar Linkage Video

NXT Motor 53787 2 x Brick 1 x 12 with Holes 3895 2 x Liftarm 1 x 11. 5 Double Bent 32009 4 x Liftarm 1 x 3 Straight 32523 8 x Pin with Friction 4459 2 x Axle Pin 3749 Pin Long with Friction 6558 Step 1: Parts. Step 3: Insert Axle Pins. Pin motor and liftarms Step 2: Pin 1 x 3 Liftarms. Thread Long Pin with Friction Step 4: Attach Bricks

Exercises 4 -1 Attach Motor to Port A with cable. Write and run a program to make mechanism move forward and the backward.
- Slides: 14