MCL MOBILE ROBOT LOCALIZATION USING MONTE CARLO LOCALIZATION
Sign up to view full document!
SIGN UP
")
MCL을 이용한 이동로봇 위치추정의 구현 ( MOBILE ROBOT LOCALIZATION USING MONTE CARLO LOCALIZATION ) 한양대학교 전자전기전공 이용학

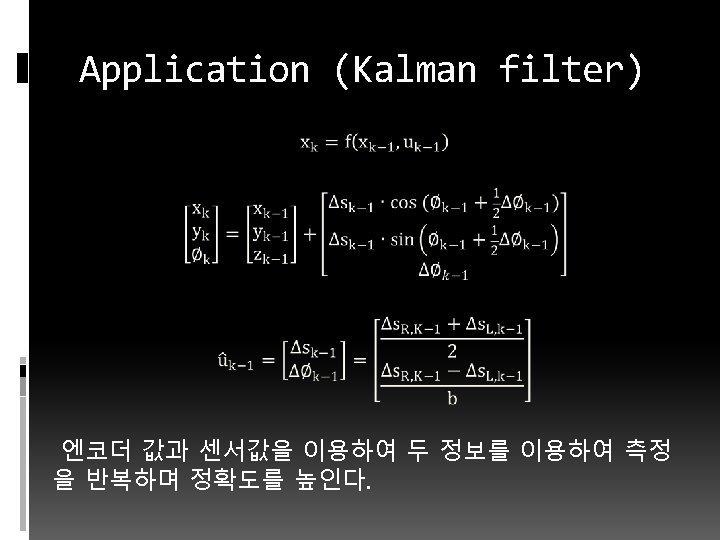
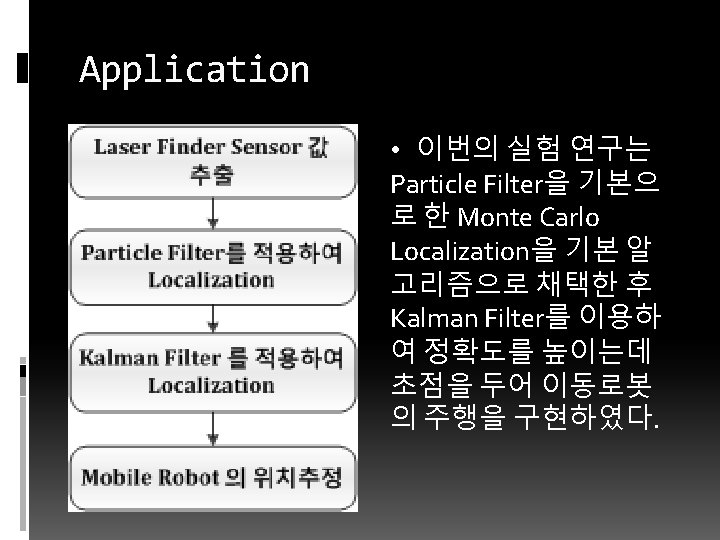
For Navigation 기존의 Markov Localization 및 여러 방법 제시 많은 계산 량과 복잡한 연산과정 Particle Filter를 적용시킨 Monte Carlo Localization 에 Kalman Filter를 이용하여 정확도를 높인 Localization
")
Application (Particle filter)
")
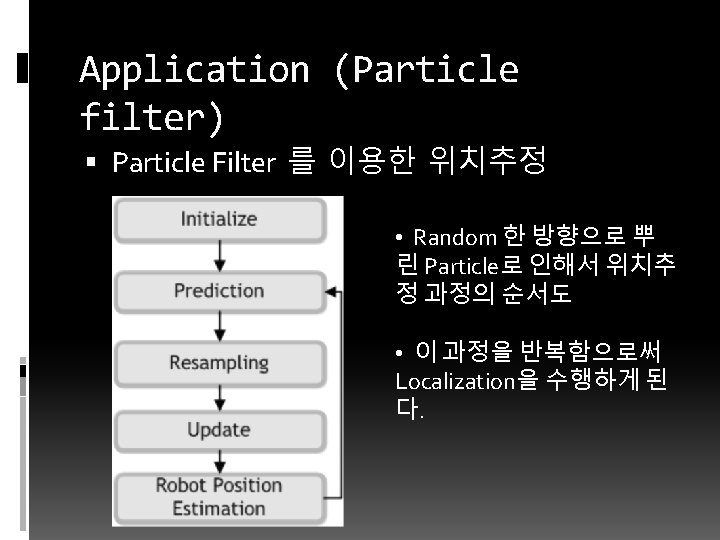
Application (Particle filter)

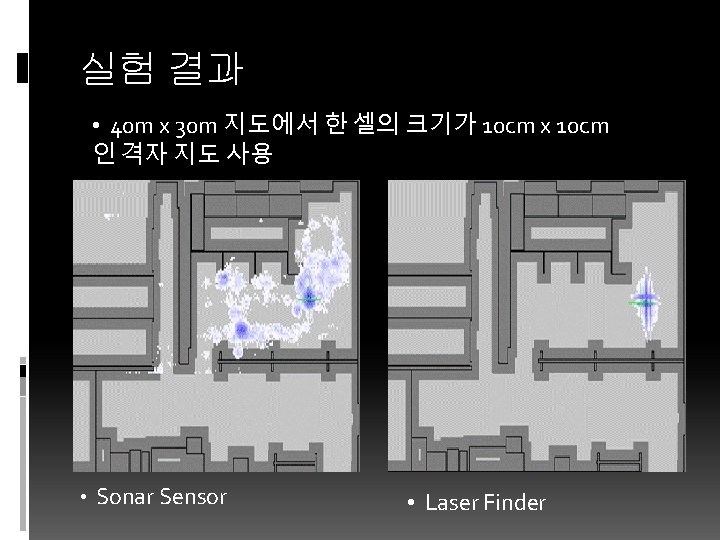

실험 결과 • Laser Finder 를 이용하여 Localization Simulation
- Slides: 11