MATLAB SAC Data Format and Header Each signal


MATLAB SAC

Data Format and Header Each signal or seismogram is stored in a separate binary or alphanumeric data file. Each data file contains a header that describes the contents of that file.

Time The SAC header contains a reference or zero time, stored as six integers (NZYEAR, NZJDAY, NZHOUR, NZMIN, NZSEC, NZMSEC), but normally printed in an equivalent alphanumeric format (KZDATE and KZTIME). %sac SAC> r GRAT. EHZ. NM SAC> lh #list header FILE: GRAT. EHZ. NM – 1 #this is a partial header --------NPTS = 360100 B = 0. 000000 e+00 E = 3. 600990 e+03 IFTYPE = TIME SERIES FILE DELTA = 1. 000000 e-02 KZDATE = APR 06 (097), 2008 KZTIME = 02: 59. 320

Event and Station Info SAC header can store station and event info FILE: WMQ. BHZ. D. 1995. 073: 10. 34. 49 - 1 ----------------KSTNM = WMQ STLA = 4. 382110 e+01 STLO = 8. 769500 e+01 STEL = 8. 970000 e+02 (m) EVLA = 3. 086000 e+00 EVLO = 9. 584800 e+01 EVDP = 3. 040000 e+01

Once the event and station information are store, the program automatically calculates and stores distance, azimuth, backazimuth, and great circle arc length DIST = 4. 583862 e+03 (km) AZ = 3. 510350 e+02 (degrees) BAZ = 1. 675856 e+02 (degrees) GCARC = 4. 120298 e+01 (degrees)

Header Storage http: //www. iris. edu/manuals/sac/SAC_Manuals/File. For mat. Pt 1. html http: //www. iris. edu/manuals/sac/SAC_Manuals/File. For mat. Pt 2. html
![Matlab function: sac. m function [head 1, head 2, head 3, data]=sac(filename) % Read](http://slidetodoc.com/presentation_image/20be6a0c7884f287f6f444b5dda12432/image-8.jpg "Matlab function: sac. m function [head 1, head 2, head 3, data]=sac(filename) % Read")
Matlab function: sac. m function [head 1, head 2, head 3, data]=sac(filename) % Read one single SAC format file %head 1 (float matrix), head 2 (int matrix), and head 3 (char matrix). % head 3 here is integer matrix, to show it under ASCII, just char(head 3). fid=fopen(filename, 'rb', 'b'); status=fseek(fid, 0, 'bof'); head 1=fread(fid, [5, 14], 'float 32'); head 2=fread(fid, [5, 8], 'int 32'); head 3=fread(fid, [24, 8], 'char'); head 1=head 1'; head 2=head 2'; head 3=head 3'; data=fread(fid, npts, 'float 32');
![Matlab function: loadsac. m function [data, npts, delta, b, dist, az, baz, gcarc] =](http://slidetodoc.com/presentation_image/20be6a0c7884f287f6f444b5dda12432/image-9.jpg "Matlab function: loadsac. m function [data, npts, delta, b, dist, az, baz, gcarc] =")
Matlab function: loadsac. m function [data, npts, delta, b, dist, az, baz, gcarc] = … loadsac(sacfilename) [head 1, head 2, head 3, data]= … sac(sacfilename); delta = head 1(1); npts=head 2(2, 5); b = head 1(2, 1); dist= head 1(11, 1); az = head 1(11, 2); baz = head 1(11, 3); gcarc=head 1(11, 4); As currently written, you modify the output of loadsac to get the header values you are interested in …. Needs to be generalized, and other similar sac readers exist

Coding and Flow Charts Longer codes may require a roadmap (much like your research projects!) Today’s lecture will focus on understanding Chuck’s matlab script for polarization analysis using 3 component recordings of body and/or surface waves http: //www. ceri. memphis. edu/people/langston/matlab/polariz e. html

GOAL: solve for polarization using 3 component seismic data Starting data: 3 component single station SAC formatted data Result: Identify the azimuth(s) of the primary wave(s) recorded in the data How to we get from A to B?
 is a vector space transform often")
Principal Component Analysis • Principal component analysis (PCA) is a vector space transform often used to reduce multidimensional data sets to lower dimensions for analysis.

• PCA involves the calculation of the eigenvalue decomposition of a data covariance matrix or singular value decomposition of a data matrix, usually after mean centering the data for each attribute. • Its operation can be thought of as revealing the internal structure of the data in a way which best explains the variance in the data.
 that maximizes the")
What we are looking for: • New set of axes (basis) that maximizes the correlation of HT(Z) with R, and minimizes the correlations between both HT(Z) and R with T. • We are not using the full power of PCA, since we already have some model for the result of the analysis (and have therefore preprocessed the data by taking the Hilbert transform of the z component).

What is the idea? • Seismic waves are polarized • P wave longitudinal (V and R) • S wave transverse with SH and SV polarizations (T, V and R) • Rayleigh waves (V and R) • Love waves (T).

GOAL: Solve for polarization • load SAC data • remove mean • plot waveforms • filter waveforms to highlight waves of interest • plot filtered waveforms Main Code • principal component analysis using 3 -component data • plot azimuths of eigenvectors • plot azimuths exceeding 50% of maximum value • note, this technique requires zero-mean data Data Preparation Results
…. suggests using")
Step 1: Data Preparation Load SAC data 3 files (Z, E, N)…. suggests using a subroutine Provide station name Remove the mean Plot waveforms vs time Filter waveforms Design a filter; allow flexible input of corner info Work on 3 files…suggests a subroutine Plot filtered waveforms
 % Program to read in")
Create function ‘polarize’ function polarize(station, twin, hilb, flp, fhi) % Program to read in 3 component waveform data % Create the covariance matrix for a moving time window % Find the principal components and infer polarization % Written by CL Langston on somedate % input: % station = station name for sacfile prefix % twin = window size in secs % hilb=1 to preform hilbert transform, 0 to not % flp = low frequency corner frequency of a 2 nd order butterworth % filter used to filter the data, if 0, then no filtering % fhi = hi frequency corner frequency of the filter

Loading SAC data Many matlab scripts exist to read in sac data. Chuck provides one. m file called readsac. m online Currently this is sensitive to byte order format and requires that you provide the npts and delta of the input sac data… It is not as flexible as it could be Amplitude data is a row vector I have one loadsac. m that uses a subroutine ‘sac’ not sensitive to byte order returns the data, npts, delta, and begin point of the SAC file data is a column vector may be stolen from /home/hdeshon/Bolivia/matlab
; nname=strcat(station, '.")
%use input variable station to construct the filenames ename=strcat(station, '. BHE. SAC'); nname=strcat(station, '. BHN. SAC'); zname=strcat(station, '. BHZ. SAC'); [e, npts 1, delt 1, b] = loadsac(ename); [n, npts 2, delt 2, b] = loadsac(nname); [z, npts 3, delt 3, b] = loadsac(zname);

if npts 1~=npts 2 && npts 1~=npts 3 %requires data be same length exit; else npts=npts 1; delt=delt 1; ttot=(npts-1)*delt; %total time in secs for i=1: npts t(1, i)=i*delt; %create row vector of times rather than points end How would we vectorized this? t=linspace(1, npts); t=t*delt;

Removing the data mean We need to remove the mean of the data for principal component analysis (PCA). We also need to transpose the column vector data into row vectors. e=dmean(e’); n=dmean(n’); z=dmean(z’); % remove the mean from each % and transpose the data
![subroutine: dmean function [a]=dmean(b) % Remove the mean from a row vector m=mean(b); a=b-m;](http://slidetodoc.com/presentation_image/20be6a0c7884f287f6f444b5dda12432/image-23.jpg "subroutine: dmean function [a]=dmean(b) % Remove the mean from a row vector m=mean(b); a=b-m;")
subroutine: dmean function [a]=dmean(b) % Remove the mean from a row vector m=mean(b); a=b-m; return;

For this example, the data is actually a synthetically derived set of surface waves using a function Chuck wrote called testchirps. Real data would not look this clean.

Rayleigh R and Z related by Hilbert X-form 90° phase shift, blue trace is Hilbert Transformed to green trace, then overlays red trace
; % to")
Hilbert Transform if hilb ==1; % hilbert transform the vertical component zh=hilbert(z); % to make Rayleigh wave in phase on vert and horz z=-imag(zh); % if present else; end;
")
Make Love and Rayleigh waves (Z, R and T)

Rotate horizontals into seismograms @ 30°.
; subplot(3, 1,")
Plot the data % plot the raw data f 1=figure('name', 'DATA SEISMOGRAMS'); subplot(3, 1, 1); plot(t, e); xlabel('time sec'); ylabel(strcat('EW Comp at ', station)); Love Wave subplot(3, 1, 2); plot(t, n); xlabel('time sec'); ylabel(strcat('NS Comp at ', station)); Rayleigh Wave subplot(3, 1, 3); plot(t, z); xlabel('time sec'); ylabel(strcat('Z comp at ', station)); Rayleigh Wave

Filtering is a two part project in Matlab Design the filter Apply the filter There is a filter design GUI you can use to design the perfect filter called fdatool Or you can design filters using pre-built filter types (Butterworth, Bessel, etc. )
![function [d]=bandpass(c, flp, fhi, npts, delt) % [d]=bandpass(c, flp) % bandpass a time series](http://slidetodoc.com/presentation_image/20be6a0c7884f287f6f444b5dda12432/image-31.jpg "function [d]=bandpass(c, flp, fhi, npts, delt) % [d]=bandpass(c, flp) % bandpass a time series")
function [d]=bandpass(c, flp, fhi, npts, delt) % [d]=bandpass(c, flp) % bandpass a time series with a 2 nd order butterworth filter % c = input time series % flp = lowpass corner frequency of filter % fhi = highpass corner frequency % npts = samples in data % delt = sampling interval of data n=2; % 2 nd order butterworth filter fnq=1/(2*delt); % Nyquist frequency Wn=[flp/fnq fhi/fnq]; % non-dimensionalize the corner frequencies [b, a]=butter(n, Wn); % butterworth bandpass non-dimensional frequency d=filt(b, a, c); return; % apply the filter: use zero phase filter (p=2)

Filter & plot the filtered data % filter the data e 1=bandpass(e, flp, fhi, npts, delt); n 1=bandpass(n, flp, fhi, npts, delt); z 1=bandpass(z, flp, fhi, npts, delt); e=e 1; n=n 1; z=z 1; % plot the filtered data f 2=figure('name', 'FILTERED SEISMOGRAMS'); subplot(3, 1, 1); plot(t, e 1); …… removed for clarity

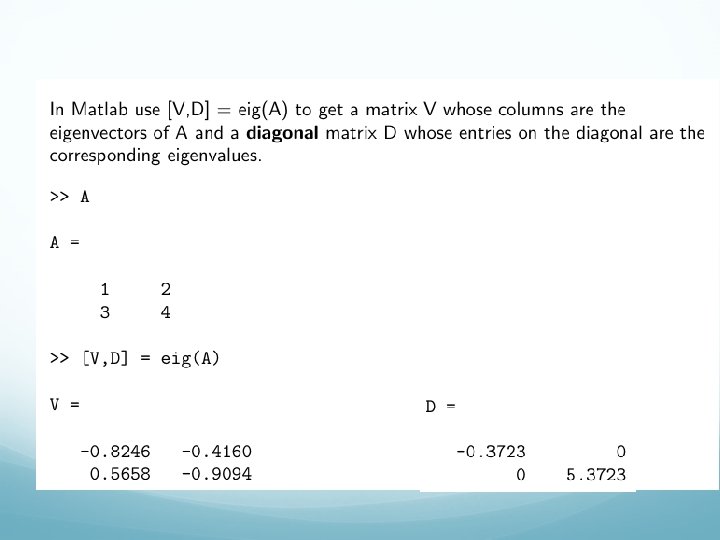
GOAL: Solve for polarization • Recognize that incoming seismic phases should represent the principal components, or the strongest signal, on the 3 component data • The principal components, in turn, are equal to the eigenvectors of the covariance matrix of the 3 component matrix. This can be derived using PCA techniques • Eigenvectors/values represent a spatial transformation which maximizes covariance between the 3 components, and they contain information on the azimuth from which the primary signal is derived • Since multiple phases may be present, we would prefer to look at short time windows of the 3 component data, or in other words, perform PCA on a running window through the continuous waveforms Results • plot azimuths of eigenvectors • plot azimuths exceeding 50% of maximum value Main Code

Step 2: Main Code Create a running window Calculate the azimuth for each eigenvalue Create a matrix of the 3 component data in the window Reorder the eigenvectors/ei genvalues Calculate the correlation matrix Find the eigenvectors and eigenvalues
 + 1; % total")
Moving window using loops % Moving window loop npts 1=fix(ttot/delt) + 1; % total number of samples to analyze nwin=fix(twin/delt) + 1; % number of samples in a time window npshift=fix(twin/(2*delt))+1; % number of samples to shift over kfin=fix((npts 1 -nwin)/(npshift+1))+1; % number of time windows considered mxde 1=0. ; nwin mxde 2=0. ; mxde 3=0. ; npshift npts 1
*(npshift-1)+1; % start of time window nwinfn=nwinst+nwin-1; % end of time")
for k=1: kfin; nwinst=(k-1)*(npshift-1)+1; % start of time window nwinfn=nwinst+nwin-1; % end of time window ……. . missing code to be supplied later t 2(k)=delt*(nwinst-1); % assign time for this window to the window start end; k= 1 k= 3 k= 2 … k=kfin

Eigenvalues/Eigenvectors
; % signal matrix")
Missing code from inside our loop a=csigm(e, n, z, nwinst, nwinfn); % signal matrix c=a'*a; % covariance matrix [v 1, d 1]=eig(c); % eigenvalue/eigenvectors [v, d]=order(v 1, d 1); % put eigenvalues & eigenvectors in ascending order % azimuth for each of the 3 eigenvalues ang 1(k)=atan 2(v(1, 1), v(2, 1)) * 180/pi; ang 2(k)=atan 2(v(1, 2), v(2, 2)) * 180/pi; ang 3(k)=atan 2(v(1, 3), v(2, 3)) * 180/pi; % incidence angle of the 3 eigenvalues vang 1(k)=acos(abs(v(3, 1)))* 180/pi; %angle from the vertical vang 2(k)=acos(abs(v(3, 2)))* 180/pi; vang 3(k)=acos(abs(v(3, 3)))* 180/pi;
=d(1); de 2(k)=d(2); de 3(k)=d(3); mxde 1=max(mxde 1, de 1(k));")
Still in loop de 1(k)=d(1); de 2(k)=d(2); de 3(k)=d(3); mxde 1=max(mxde 1, de 1(k)); % find the maximum values mxde 2=max(mxde 2, de 2(k)); mxde 3=max(mxde 3, de 3(k));
; subplot(3, 1, 1); plot(t")
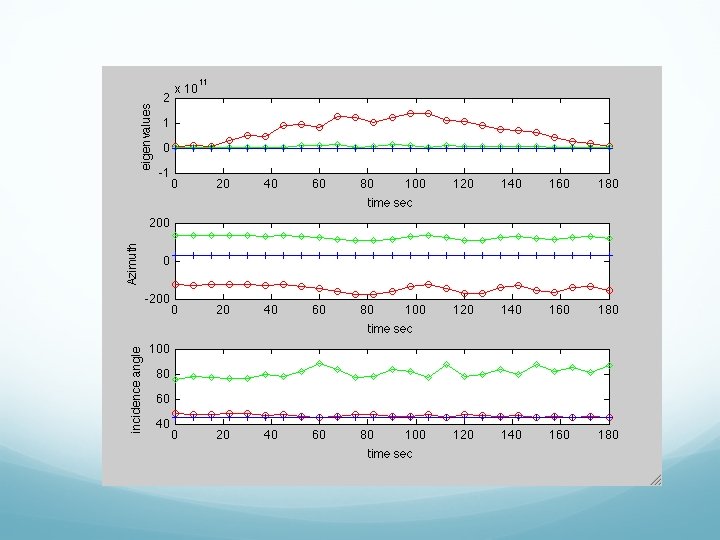
Outside of Loop again f 3=figure('name', 'Eigenvalues and Inferred Azimuth'); subplot(3, 1, 1); plot(t 2, de 1, '-or', t 2, de 2, '-dg', t 2, de 3, '-+b'); xlabel('time sec'); ylabel('eigenvalues'); subplot(3, 1, 2); plot(t 2, ang 1, '-or', t 2, ang 2, '-dg', t 2, ang 3, '-+b'); xlabel('time sec'); ylabel('Azimuth '); subplot(3, 1, 3); plot(t 2, vang 1, '-or', t 2, vang 2, '-dg', t 2, vang 3, '-+b'); xlabel('time sec'); ylabel('incidence angle ');

GOAL: Solve for polarization Results • • plot azimuths of eigenvectors • plot azimuths exceeding 50% of maximum value Main Code
; subplot(2, 3, 1); title('Azimuth -")
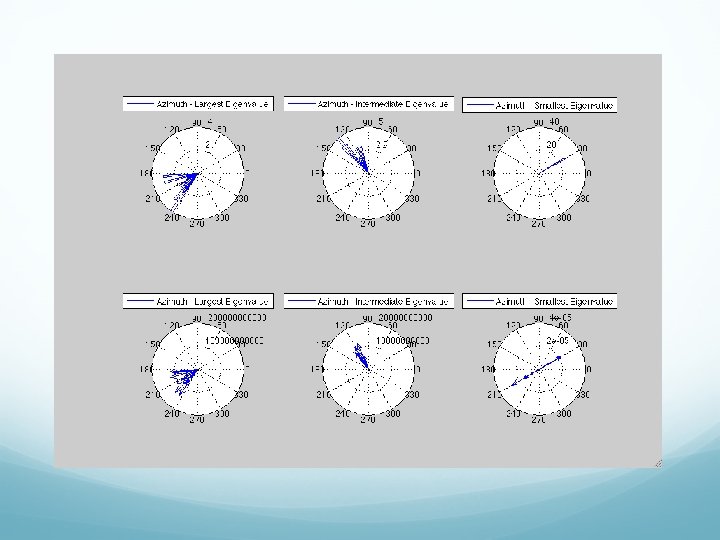
Rose Diagrams % Rose plots f 4=figure('name', 'Azimuth Distribution'); subplot(2, 3, 1); title('Azimuth - Largest Eigenvalue'); rose(ang 1*pi/180, 100); subplot(2, 3, 2); title('Azimuth - Intermediate Eigenvalue'); rose(ang 2*pi/180, 100); subplot(2, 3, 3); title('Azimuth - Smallest Eigenvalue'); rose(ang 3*pi/180, 100);

2 Bonus Points: Vectorization of polarization code • If we take a short time period we can think of each component as a vector of n terms. • If we take the dot product of each vector with itself and with the other two components we can find the “angle” between them.

• We can also make these dot products by making a 3 xn array using each seismogram as a row. • Multiplying this array with its transpose results in a 3 x 3 matrix with the various dot products in the elements of the matrix.

• Now find the eigenvectors and eigenvalues of this matrix. • From the eigenvectors we can make a rotation matrix that will rotate our matrix to a diagonal matrix. • The off diagonal elements are now all zero and from the geometric interpretation of the dot product this means that the two vectors used to make that dot product are perpendicular.

• So we can rotate the original horizontal components into a new set of seismograms rotated to the principal directions defined by the eigenvectors. • The dot products of the off diagonal terms will now be zero, indicating the vectors are perpendicular.
- Slides: 49